基于kalman滤波的皮肤温度检测系统及方法及设备
技术领域
1.本发明属于皮肤温度检测技术领域,特别涉及基于kalman滤波的皮肤温度检测系统及方法及设备。
背景技术:
2.在医疗美容行业中往往需要通过各种方式获得皮肤温度,但是在实际测量过程中,由于测量过程中操作手法以及环境的影响往往使得测量结果有偏差或者得到的测量数据不稳定,直接导致系统判断错误,进而执行错误程序。
技术实现要素:
3.本发明的目的在于提供基于kalman滤波的皮肤温度检测系统及方法及设备,以解决上述问题。
4.为实现上述目的,本发明采用以下技术方案:
5.基于kalman滤波的皮肤温度检测系统,包括:温度采集模块、处理模块和对比模块;温度采集模块和对比模块均连接到处理模块,温度采集模块用于采集皮肤温度,处理模块用于对采集到的温度进行降噪过滤,对比模块用于将降噪后的温度数据和阈值对比后传输给处理模块下达指令。
6.进一步的,温度采集模块为温度传感器。
7.进一步的,处理模块为单片机,单片机内运行kalman滤波算法。
8.进一步的,对比模块为比较器。
9.进一步的,基于kalman滤波的皮肤温度检测方法,包括以下步骤:
10.步骤1,温度传感器采集到温度将数据传给单片机,单片机将采集到的数据进行kalman滤波算法过滤掉测量信号的噪声;
11.步骤2,经过过滤后的温度信号为最佳温度信号,最佳温度信号高于阈值则触发单片机执行关闭仪器的操作。
12.进一步的,根据温度数据进行kalman滤波算法,温度信号在时域内的状态方程和测量方程分别是:
13.状态方程:x(t)=a(t)x(t) b(t)u(t) w(t)
14.测量方程:z(t)=h(t)x(t) v(t)
15.以上x(t)为预测值,z(t)为观测值,u(t)为控制量,a(t)与b(t)为状态参数,h(t)为观测值与实际温度的线性度关系,w(t)与v(t)分别为系统噪声,观测噪声,其方差分别为q,r且二者不相关。
16.进一步的,卡尔曼滤波算法中,时间更新方程如下:
[0017][0018]
[0019]
状态更新方程如下:
[0020][0021][0022][0023]
时间更新方程中,^xk,^x
k-1
为状态一步预测,p
k,k-1
为一步预测均方误差;
[0024]
测量更新方程中,kk为滤波增益,pk为估计均方误差,^xk为状态估计,zk为观测值。
[0025]
进一步的,基于kalman滤波的皮肤温度检测设备,包括存储器、处理器以及存储在所述存储器中并可在所述处理器上运行的计算机程序,处理器执行所述计算机程序时实现基于kalman滤波的皮肤温度检测方法的步骤。
[0026]
与现有技术相比,本发明有以下技术效果:
[0027]
本发明将滤波算法引入皮肤温度检测,经过算法处理后的温度结果因为卡尔曼滤波过滤掉了测量信号的噪声,所以经过算法后的结果为最佳温度,当温度高于阈值则可触发单片机其他操作,由于经过卡尔曼滤波算法处理的结果更准确,因此可以避免单片机误操作。
附图说明
[0028]
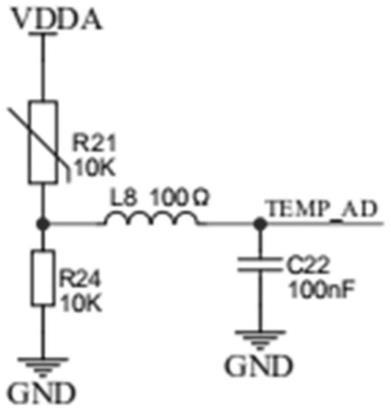
图1为仪器所使用的温度传感器原理图;
[0029]
图2为单片机原理图;
[0030]
图3为本发明方法流程图。
具体实施方式
[0031]
以下结合附图对本发明进一步说明:
[0032]
请参阅图1至图3,本发明提供一种设计难度小,易于实现,过滤掉了测量信号的噪声,使数据稳定的测温方法;本发明是通过以下技术方案来实现:
[0033]
一种基于kalman滤波的皮肤温度检测方法,包括如下步骤,
[0034]
步骤1,温度传感器采集到温度将数据传给单片机,单片机将采集到的数据进行kalman滤波算法,经过算法处理后的温度结果因为卡尔曼滤波过滤掉了测量信号的噪声,所以经过算法后的结果为最佳温度,当温度高于阈值则可触发单片机其他操作,由于经过卡尔曼滤波算法处理的结果更准确,因此可以避免单片机误操作。
[0035]
步骤2,根据温度数据进行kalman滤波算法,温度信号在时域内的状态方式和测量方程分别是:
[0036]
状态方程:x(t)=a(t)x(t) b(t)u(t) w(t)
[0037]
测量方程:z(t)=h(t)x(t) v(t)
[0038]
以上x(t)为预测值,z(t)为观测值,u(t)为控制量,a(t)与b(t)为状态参数,h(t)为观测值与实际温度的线性度关系,w(t)与v(t)分别为系统噪声,观测噪声,其方差分别为q,r且2者不相关。
[0039]
卡尔曼滤波算法流程如图3所示.
[0040]
卡尔曼滤波算法中,时间更新方程如下:
[0041][0042][0043]
状态更新方程如下:
[0044][0045][0046][0047]
时间更新方程中,^xk,^x
k-1
为状态一步预测,p
k,k-1
为一步预测均方误差;
[0048]
测量更新方程中,kk为滤波增益,pk为估计均方误差,^xk为状态估计,zk为观测值。
[0049]
从图3中可以明显看出卡尔曼滤波具有2个计算回路:滤波计算回路和增益计算回路。其中增益计算回路是独立计算回路,滤波计算回路依赖于增益计算回路。在一个滤波周期内,从卡尔曼滤波在使用系统信息和量测信息的先后次序来看,卡尔曼滤波具有2个明显的信息更新过程:
[0050]
时间更新过程和测量更新过程。卡尔曼滤波器的优势在于,当前时刻的预测值^xk只跟当前时刻的观测值zk和上一时刻的预测值^x
k-1
相关,只是时域内的递推形式,不需要存储历史数据;增益kk与观测量zk无关,可以离线计算出增益,减少实时计算量,因此完全可以由单片机实现。
[0051]
实施例:
[0052]
温度传感器采集到温度将数据传给单片机,单片机将采集到的数据进行 kalman滤波算法,经过算法处理后的温度结果因为卡尔曼滤波过滤掉了测量信号的噪声,所以经过算法后的结果为最佳温度,当温度高于阈值则可触发单片机其他操作,由于经过卡尔曼滤波算法处理的结果更准确,因此可以避免单片机误操作。
[0053]
基于卡尔曼滤波的铂电阻高精度水温测量系统中图分类号:th-86文献标志码:a doi:10.16086/j.cnki.issn1000-0380.2020020028。
[0054]
实例中传感器型号为pt1000铂电阻
[0055]
通过卡尔曼滤波算法和线性拟合提高了阻值测量的准确度和稳定性,使用反向函数法对pt1000分度表进行分段拟合,以减小铂电阻非线性误差。试验结果表明,该系统在-20~ 100℃内,最大误差为0.05℃,整体精度优于0.044%。
[0056]
最后应当说明的是:以上实施例仅用以说明本发明的技术方案而非对其限制,尽管参照上述实施例对本发明进行了详细的说明,所属领域的普通技术人员应当理解:依然可以对本发明的具体实施方式进行修改或者等同替换,而未脱离本发明精神和范围的任何修改或者等同替换,其均应涵盖在本发明的权利要求保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。