1.本发明属于海域水质参数预测的领域,尤其涉及一种海水水质三维时空序列多参数精准预测方法及系统。
背景技术:
2.随着海洋信息时代的发展,我们可以利用数据总结自然和社会规律,并预测未来趋势,充分利用大数据帮助人类应对气候变化,保护生态环境,预防自然灾害。然而,对水质时空序列多参数精准预测一直是困扰研究者的问题,针对这一问题,学者利用机器学习技术运用于养殖水质关键参数预测,引起了学术界和工业界的广泛兴趣。
3.随着机器学习的兴起,机器学习算法在养殖水质(湖水、池塘以及海水)精准预测方面的运用越来越广泛,特别在海水水质精准预测方面。y.chen
1.等人提出sc-k-means-rbf预测模型对水质三维空间序列溶解氧含量预测,预测精度为93%,sc-k-means结合能够对数据进行降噪,rbf克服训练局部最小值,消除数据冗余和错误,考虑了三维空间序列的水质单参数,但该模型仅运用于短期时间序列和单参数预测。随着深度学习的发展,深度学习能够很好的学习短期时间序列水质数据。因此,z.hu
2.等人和y.liu
3.等人构建lstm预测模型对水质预测,lstm网络具有的遗忘门和更新门处理特征的优势能够很好的处理长期时间序列水质数据。j.xie
4.等人利用较lstm和rnn网络参数少和效率高的gru网络,构建attention-ged(gru encoder-deconder)模型对大规模和不同时期序列海面温度进行预测,解决了对不同时期序列水质参数预测问题。
4.针对学者运用机器学习技术对海水水质精准预测研究中存在的问题以下几个方面:
5.①
养殖水质领域工程
6.⑴
对短期时间序列和三维空间池塘水质单参数的预测。
7.⑵
对长短期时间序列的海水水质单参数或双参数预测。
8.⑶
对长短期时间序列和空间序列的池塘水质单参数预测。
9.②
在海水水质预测中深度学习技术的运用
10.⑴
运用时空注意力(attention)与ged结合的模型(attention-ged)
4.11.⑵
运用cnn与lstm结合(convlstm)的模型
5.12.综上所述,第一,在海水领域中,学者还未有同时考虑的长短期序列和三维空间序列海水水质多参数预测。第二,已有的方法在海水预测方面还未考虑融合数据处理算法、时空注意力、cnn和ged方法提取海水水质多参数特征之间的相关性。
技术实现要素:
13.为了弥补以上学者在海水预测运用研究中存在的缺陷,实现对海水水质多参数精准预测,挖掘多参数特征之间关系,研究利用深度学习技术提高水质多参数预测精度。本发明提供了一种海水水质三维时空序列多参数精准预测方法,包括:
14.获取海水水质的关键参数,对所述关键参数进行处理,获得目标关键参数;
15.基于空间注意力,获得所述目标关键参数之间的时空特征信息;
16.基于时间注意力和所述时空特征信息,获得预测未来数据序列信息;
17.基于所述时空特征信息和预测未来数据序列信息预测未来水质多参数含量,获得预测结果。
18.优选的,对所述关键参数进行处理,获得目标关键参数的过程包括,对所述关键参数进行降噪处理,获得关键参数分量;将所述关键参数分量输入到cnn网络,提取所述关键参数分量之间的时空特征。
19.优选的,对所述关键参数进行降噪处理的过程包括,将所述关键参数进行分解为子序列和残差序列,并利用样本熵算法进行组合为随机分量、趋势分量、以及细节分量。
20.优选的,基于空间注意力,获取所述目标关键参数之间的时空特征信息的过程包括,基于空间注意力,动态学习所述目标关键参数之间的时空特征,获得第一权值;将所述时空特征输入到gru encoder网络,获得第一隐藏状态;基于所述第一权值和第一隐藏状态,获得所述目标关键参数之间的时空特征信息。
21.优选的,基于时间注意力和所述时空特征信息,获取预测未来数据序列信息的过程包括,利用时间注意力处理所述时空特征信息,获得第二权值;将所述时空特征信息输入到gru encoder网络,获得第二隐藏状态;基于所述第二权值和第二隐藏状态,获得所述预测未来数据序列信息。
22.优选的,基于所述时空特征信息和预测未来数据序列信息预测未来水质多参数含量的过程包括,将所述时空特征信息和预测未来数据序列信息输入到gru encoder网络进行编码,转化为固定长度的向量;对所述固定长度的向量进行解码,将所述固定长度的向量转化为输出序列,预测所述未来水质多参数含量。
23.本发明还提供了一种海水水质三维时空序列多参数精准预测系统,包括:
24.参数获取模块,用于获取海水水质的关键参数;
25.参数处理模块,与所述参数获取模块连接,用于对所述关键参数进行处理,获得目标关键参数;
26.注意力算法模块,用于获取所述目标关键参数之间的时空特征信息、预测未来数据序列信息;
27.预测模块,用于根据所述时空特征信息和预测未来数据序列信息预测未来水质多参数含量,获得预测结果。
28.优选的,所述参数处理模块包括降噪处理单元和特征提取单元;
29.所述降噪处理单元用于对所述关键参数进行降噪处理,获得关键参数分量;
30.所述特征提取单元用于通过cnn网络,提取所述关键参数分量之间的时空特征。
31.优选的,所述注意力算法模块包括空间注意力单元,所述空间注意力单元包括第一权值单元、第一隐藏状态单元、第一信息获取单元;
32.所述第一权值单元用于通过空间注意力,动态学习所述目标关键参数之间的时空特征,获得第一权值;
33.所述第一隐藏状态单元用于通过gru encoder网络,获得第一隐藏状态;
34.所述第一信息获取单元用于根据所述第一权值和第一隐藏状态,获得所述目标关
键参数之间的时空特征信息。
35.优选的,所述注意力算法模块包括时间注意力单元,所述时间注意力单元包括第二权值单元、第二隐藏状态单元、第二信息获取单元;
36.所述第二权值单元用于通过时间注意力处理所述时空特征信息,获得第二权值;
37.所述第二隐藏状态单元用于通过gru encoder网络,获得第二隐藏状态;
38.所述第二信息获取单元用于根据所述第二权值和第二隐藏状态,获得所述预测未来数据序列信息。
39.本发明公开了以下技术效果:
40.本发明提供的一种海水水质三维时空序列多参数精准预测方法可以提高对时间序列和空间序列的海水水质多参数特征信息提取率;降低海水水质多参数数据的非平稳性;提高对水质时间序列和三维空间多参数的预测精度。
附图说明
41.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
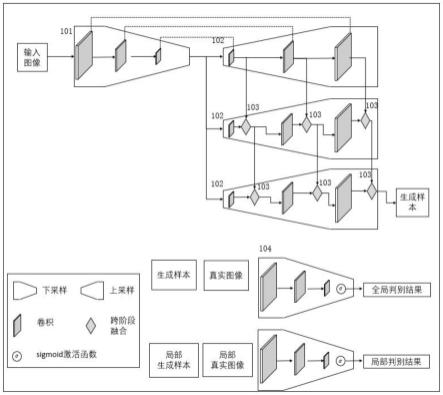
42.图1为本发明实施例的方法流程图。
具体实施方式
43.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
44.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图和具体实施方式对本发明作进一步详细的说明。
45.实施例一
46.如图1所示,本发明提供一种海水水质三维时空序列多参数精准预测方法,包括:
47.1、通过pca算法优选出海水水质关键参数以及计算它们之间的相关系数,每个关键参数数据xk(k=1,2,
…
,t)是一个四维向量,x=[x1,x2,x3,x4]
t
,x1为采样时间,x2,x3,x4为采样点在海水区域的三维坐标。海水水质关键参数均匀分布在垂直坐标上,设置时间t,则生成每个关键参数在时间t处的50*50*50(t,x,y,z)坐标位置。
[0048]
2、利用eemd对优选出的水质关键参数数据进行降噪处理。eemd分解所有关键参数的原始序列,计算它们之间的相关性特征,将其分解为具有不同特征的x个固有模态分量,imf1-imfx和一个残差分量res。然后计算水质各个关键参数分解后子序列的样本熵进行组合组分,经过判断,将其重组为随机分量、趋势分量、以及细节分量,即对每个imf分量进行叠加。
[0049]
3、通过滑动窗口选取d时间序列关键参数的随机分量、趋势分量、以及细节分量进入到cnn网络输入层处理,卷积层和池化层分别提取所有关键参数分量之间特征。
[0050]
4、利用空间注意力来动态学习水质关键参数之间的空间特征,产生权值为
[0051]
5、将提取水质关键参数之间的空间性特征输入到gru encoder,gru encoder在每个时间步骤中输入上一步隐藏状态h
t-1
或h0和历史时序水质数据(即过去的水质序列),在每个时间步数中都会生成一个新的隐藏状态hi(i=1,2,
…
,k),当模型处理完所有的历史序列后,则生成隐藏状态h1,h2,
…
,hk,每个隐藏状态与空间注意力产生的权值对应,所有的水质关键参数之间的特征信息都由隐藏状态hi(i=1,2,
…
,k)与计算获得。
[0052]
6、每个历史序列的数据对未来数据预测有不同的影响,因此将所有含有时间序列输入到时间注意力来学习gru decoder网络隐藏状态在每个时间窗口中的影响,则生成权值c1,c2,
…
,c
t
,在每个时间步数中都会生成一个新的隐藏状态,将处理完历史数据后,则生成h1,h2,
…
,h
t
与c1,c2,
…
,c
t
对对应,所有预测未来数据序列信息由hi(i=1,2,
…
,k;)与cj(j=1,2,
…
,t)计算得到。
[0053]
7、利用h
icj
(i=1,2,
…
,k;j=1,2,
…
,t)与上一步关键参数含量序列结合输入到gru decoder预测未来水质多参数含量,该网络对于多尺度参数预测非常的灵活,隐藏状态大小与编码相同。
[0054]
实施例二
[0055]
本发明还提供了一种海水水质三维时空序列多参数精准预测系统,包括:
[0056]
参数获取模块,用于获取海水水质的关键参数,减少与水质关键参数相关性不大的其他物理或水质因素的干扰。
[0057]
所述参数获取模块包括pca算法单元,改进的emd算法单元。所述pca算法单元用于优选海水水质关键参数,减少与水质关键参数相关性不大的其他物理或水质因素的干扰;所述改进的emd算法单元用于降低海水水质关键参数的非平稳性。
[0058]
参数处理模块,与所述参数获取模块连接,用于对所述关键参数进行处理,获得目标关键参数。海水水质关键参数包括ph值,氨氮,总磷,溶解氧,化学需氧量,预测序列为时间序列和三维空间序列。
[0059]
所述参数处理模块包括降噪处理单元和特征提取单元;所述降噪处理单元用于对所述关键参数进行降噪处理,降低海水水质关键参数的非平稳性;所述特征提取单元用于通过cnn网络,提取所述关键参数分量之间的时空特征。
[0060]
注意力算法模块,用于获取所述目标关键参数之间的时空特征信息、预测未来数据序列信息。注意力算法模块包括时间注意力单元和空间注意力单元。空间注意力用于动态学习外部属性之间的空间相关性,时间注意力用于学习gru encoder网络隐藏状态在每个时间窗口中的影响;其中,外部属性即为海水水质关键参数。
[0061]
所述空间注意力单元用于动态学习外部属性之间的空间相关性,外部属性为海水水质关键参数。空间注意力单元包括第一权值单元、第一隐藏状态单元、第一信息获取单元;所述第一权值单元用于通过空间注意力,动态学习所述目标关键参数之间的时空特征,获得第一权值;所述第一隐藏状态单元用于通过gru encoder网络,获得第一隐藏状态;所
述第一信息获取单元用于根据所述第一权值和第一隐藏状态,获得所述目标关键参数之间的时空特征信息。
[0062]
所述时间注意力单元用于学习gru encoder网络隐藏状态在每个时间窗口中的影响。时间注意力单元包括第二权值单元、第二隐藏状态单元、第二信息获取单元;所述第二权值单元用于通过时间注意力处理所述时空特征信息,获得第二权值;所述第二隐藏状态单元用于通过gru encoder网络,获得第二隐藏状态;所述第二信息获取单元用于根据所述第二权值和第二隐藏状态,获得所述预测未来数据序列信息。
[0063]
预测模块,用于根据所述时空特征信息和预测未来数据序列信息预测未来水质多参数含量,获得预测结果。
[0064]
本方法弥补了现有技术在海水预测运用研究中存在的缺陷,提出深度学习模型对长短期序列和三维空间的海水水质多参数(3个参数以上)预测。在学者已有研究成果基础上,对emd算法进行改进(eemd)以及融合时空注意力、cnn和ged网络,能够很好的降噪数据和提取多参数之间的特征,为提高海水水质多参数预测精度提供思路。
[0065]
本发明提供的一种海水水质三维时空序列多参数精准预测方法可以提高对时间序列和空间序列的海水水质多参数特征信息提取率;降低海水水质多参数数据的非平稳性;提高对水质时间序列和三维空间多参数的预测精度。
[0066]
本说明书实例所述的内容仅仅是对发明构思的实现形式的列举,本发明的保护范围不应当被视为仅限于实例所陈述的具体形式,本发明的保护范围也及于本领域技术人员根据本发明构思所能够想到的等同技术手段。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。