1.本实用新型涉及车辆悬架技术领域,特别是涉及一种扭杆弹簧主动悬架系统及其车辆。
背景技术:
2.主动悬架技术是目前底盘开发的主要方向,目前应用较广的主动悬架系统有空气悬架、液压悬架等。其中,第一种主动悬架方案通常采用作动器、减速器、缓冲机构、摇臂、推拉杆等部件加上悬架来实现,系统中还配有缓冲机构,该主动悬架方案对于空间的布置要求较高,减速器和缓冲机构需要周边避让足够的空间去布置,且悬架系统还需要布置螺旋弹簧或空气弹簧等弹性元件。同时,系统中必须通过摇臂、推拉杆施加在悬架系统上,增加了两个杆件,机构较为复杂。第二种主动悬架方案通常采用电动液压泵产生的压力驱动悬架实现垂向控制,该主动悬架方案的液压传动效率较低,能耗较高,需要足够的发动机或者电池功率储备,且同样需要布置螺旋弹簧或空气弹簧等弹性元件。
3.前面的叙述在于提供一般的背景信息,并不一定构成现有技术。
技术实现要素:
4.本实用新型的目的在于提供一种扭杆弹簧主动悬架系统及其车辆,可以实现悬架系统的垂向控制、实现车高自动调节。
5.本实用新型提供一种扭杆弹簧主动悬架系统,与车轮总成连接,包括电机、传动机构、拨叉、扭杆弹簧和摆臂,电机的输出轴与传动机构连接,电机远离传动机构的一端与车身可转动固定,传动机构与拨叉的第一端可转动连接,拨叉的第二端与扭杆弹簧的第一端固定连接,扭杆弹簧的第二端与摆臂的第一端固定连接,且摆臂的第一端与车身可转动固定;
6.其中,电机驱动传动机构运动,传动机构带动拨叉的第一端旋转,带动与拨叉的第二端固定连接的扭杆弹簧自转,扭杆弹簧自转带动摆臂的第一端自转,以使摆臂的第二端垂向运动。
7.进一步地,传动机构包括丝杠和丝杠螺母,电机的输出轴与丝杠连接,丝杠螺母套接在丝杠上,丝杠螺母与拨叉的第一端可转动连接,电机带动丝杠自转,带动丝杠螺母沿丝杠运动,带动拨叉的第一端旋转。
8.进一步地,扭杆弹簧的第二端通过花键与摆臂的第一端固定连接。
9.进一步地,拨叉的第一端设置有穿孔,丝杠螺母的中部套设于丝杠外侧,丝杠螺母的两端穿过穿孔与拨叉的第一端可转动连接,以将丝杠螺母沿丝杠的直线运动转化为拨叉的第一端的旋转运动。
10.进一步地,拨叉的第二端设置有通孔,扭杆弹簧的第一端穿过通孔与拨叉的第二端固定连接。
11.进一步地,摆臂的第二端包括球头销,车轮总成包括转向节,摆臂的第二端的球头
销与车轮总成的转向节连接。
12.进一步地,丝杠远离电机上设置有限位件。
13.进一步地,电机远离丝杠的一端固定设置有连接件,电机远离丝杠的一端通过连接件与车身转动固定。
14.进一步地,还包括控制器和多种传感器,控制器与电机以及传感器连接,传感器将采集到的汽车运行信息及路面信息反馈给控制器,根据反馈的信息,控制器控制电机启闭。
15.本实用新型提供还一种车辆,包括上述的扭杆弹簧主动悬架系统。
16.本实用新型提供的一种扭杆弹簧主动悬架系统,通过电机加传动机构驱动扭杆弹簧,扭杆弹簧带动摆臂运动,从而实现扭杆弹簧主动悬架系统的主动垂向运动,可实现车高自动调节。其中,通过对电机的扭矩和转速进行控制,可以控制扭杆弹簧自转角度,进而驱动摆臂的第二端上下摆动,通过摆臂的第二端的主动运动可以实现扭杆弹簧主动悬架系统的主动垂向运动,通过设计不同的电机控制策略,可以实现整车的姿态控制、主动侧倾、主动俯仰等场景,提升整车操稳和平顺性。另外,本实用新型提供的一种扭杆弹簧主动悬架系统,还解决了现有主动悬架方案结构复杂,对于布置要求很高的问题。因乘用车轮边的布置空间非常有限,因此简化主动悬架的结构,对于主动悬架的研发非常有必要。
附图说明
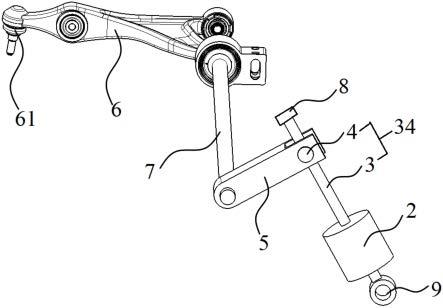
17.图1为扭杆弹簧主动悬架系统与车轮总成的连接结构示意图;
18.图2为扭杆弹簧主动悬架系统的结构示意图;
19.图3为拨叉与丝杠螺母及丝杠的连接处的放大示意图;
20.图4为扭杆弹簧主动悬架系统的控制器和传感器的结构示意图。
21.图中,1、车轮总成;2、电机;3、丝杠;4、丝杠螺母;5、拨叉;6、摆臂;7、扭杆弹簧;8、限位件;9、连接件;11、转向节;34、传动机构;51、穿孔;52、通孔;61、球头销。
具体实施方式
22.下面结合附图和实施例,对本实用新型的具体实施方式作进一步详细描述。以下实施例用于说明本实用新型,但不用来限制本实用新型的范围。
23.请参阅图1和图2,本实用新型提供的一种扭杆弹簧主动悬架系统,与车轮总成1连接,包括电机2、传动机构34、拨叉5、扭杆弹簧7和摆臂6。其中,电机2的输出轴与传动机构34连接并驱动传动机构34运动,电机2远离传动机构34的一端与车身可转动固定。传动机构34与拨叉5可转动连接,拨叉5、扭杆弹簧7和摆臂6再依次固定连接。更为具体地,传动机构34与拨叉5的第一端可转动连接,传动机构34运动带动拨叉5的第一端旋转;拨叉5的第二端与扭杆弹簧7的第一端固定连接,以使拨叉5的第一端旋转带动与拨叉5的第二端固定连接的扭杆弹簧7自转;扭杆弹簧7的第二端与摆臂6的第一端固定连接,且摆臂6的第一端与车身可转动固定,以使扭杆弹簧7自转带动摆臂6的第一端自转,以使摆臂6的第二端垂向运动,带动车轮总成1垂向运动。本实施例中,传动机构34为丝杠传动机构,包括丝杠3和丝杠螺母4,丝杠螺母4套接在丝杠3上。扭杆弹簧7采用50crv等弹簧钢制作,本身可以起到支撑悬架系统和缓冲的作用,使得本实用新型的扭杆弹簧主动悬架系统不需要再增加其他弹簧元件。摆臂6可以是麦弗逊悬架、双叉臂悬架、三连杆悬架、四连杆悬架、五连杆悬架、h臂后悬
等各种悬架中的任何一种摆臂。可以理解的是,本实施例中的传动机构34不以丝杠传动机构为限,也可以为其他用于减速增扭的结构。例如蜗轮蜗杆机构、行星齿轮机构等。
24.请参阅图1-图3,电机2的输出轴与丝杠3连接,电机2远离丝杠3的一端与车身可转动固定。更为具体地,电机2远离丝杠3的一端固定设置有连接件9,电机2远离丝杠3的一端通过连接件9与车身转动固定。丝杠螺母4与拨叉5的第一端可转动连接。更为具体地,丝杠螺母4的中部设有供丝杠3穿过的螺纹孔,拨叉5的第一端设置有穿孔51,丝杠螺母4的两端穿过穿孔51与拨叉5的第一端可转动连接,以将丝杠螺母4沿丝杠3的直线运动转化为拨叉5的第一端的旋转运动。拨叉5的第二端与扭杆弹簧7的第一端固定连接。更为具体地,拨叉5的第二端设置有通孔52,扭杆弹簧7的第一端穿过通孔52与拨叉5的第二端固定连接。扭杆弹簧7的第二端与摆臂6的第一端固定连接,且摆臂6的第一端与车身可转动固定。更为具体地,扭杆弹簧7的第二端通过花键(未图示)与摆臂6的第一端固定连接,以更好地传递机械扭矩。摆臂6的第一端靠近扭杆弹簧7的一侧通过螺栓或者以铰接的方式与车身可转动固定,摆臂6的第一端远离扭杆弹簧7的一侧通过衬套(未图示)与车身可转动固定。摆臂6的第二端与车轮总成1连接。
25.由于摆臂6的第一端、电机2远离丝杠3的一端均与车身可转动固定。因此,以与车身可转动固定的摆臂6的第一端为参照,摆臂6的第一端相对于车身的高度位置关系未发生变化,则与摆臂6的第一端固定连接的扭杆弹簧7相对于车身的高度位置关系也未发生变化,使得与扭杆弹簧7的第一端固定连接的拨叉5的第二端相对于车身的高度位置关系同样未发生变化。而当电机2启动时,电机2的输出轴带动丝杠3自转,使得丝杠螺母4沿丝杠3做直线运动。由于扭杆弹簧7具有一定的刚度,可以认为扭杆弹簧7相对于车身的高度不变,使拨叉5的第二端(即远离丝杠螺母4的一端)相对于车身的高度位置不变,丝杠螺母4沿丝杠3做直线运动能够转化为拨叉5的第一端的旋转运动,从而带动拨叉5的第二端自转,并带动与拨叉5的第二端连接的扭杆弹簧7自转,扭杆弹簧7自转再带动摆臂6的第一端自转,由于摆臂6的第一端与车身可转动固定,则摆臂6的第二端能够相对于车身做垂向运动。摆臂6的第二端与车轮总成1连接,带动车轮总成1相对于车身做垂向运动,实现车身离地间隙的调节。
26.其中,本实用新型的扭杆弹簧主动悬架系统主要设计参数如下:
27.轮心力计算公式为:
[0028][0029]
其中,t为电机2的扭矩,本实施例中为20n
·
m;
[0030]
γ为丝杠传动机构的效率,本实施例中为95%;
[0031]
l1为摆臂6旋转中心(摆臂6的第一端)到车轮总成1的轮心的距离,本实施例中为440mm;
[0032]
l2为拨叉5的长度,本实施例中为170mm;
[0033]
p为丝杠传动机构的导程,即丝杠螺母4转一圈,丝杠螺母4行走的直线距离,本实施例中为5mm;
[0034]
根据计算,本方案能提供的最大轮心力为9220n,可以满足绝大部分乘用车需求,相对于其他结构的主动悬架,基于相同的电机扭矩,本实用新型的扭杆弹簧主动悬架系统
可以实现较大的轮心力输出,可提供更大的侧倾角或俯仰角控制,适用场景更广,可适用于更大载荷的车辆。如果对轮心力有不同的需求时,可以通过调整一下参数来实现:(1)调整电机2的输出扭矩t;(2)调整拨叉5的长度l2,实现调整杠杆比;(3)调整丝杠传动机构的导程,实现调整传动比。
[0035]
请参阅图1和图2,摆臂6的第二端包括球头销61,车轮总成1包括转向节11,摆臂6的第二端的球头销61与车轮总成1的转向节11连接。
[0036]
请继续参阅图1和图2,丝杠3远离电机2的一端设置有限位件8,以防止丝杠螺母4由丝杠3上滑出。
[0037]
请参阅图4,本实用新型提供的一种扭杆弹簧主动悬架系统还包括控制器和多种传感器,控制器与电机2以及传感器连接,传感器将采集到的汽车运行信息及路面信息反馈给控制器,根据反馈的信息,控制器控制电机2启闭。本实施例中,传感器包括悬架高度传感器、车身加速度传感器、轮速传感器、雨量传感器等各类传感器。
[0038]
当使用本实用新型的扭杆弹簧主动悬架系统,结合悬架高度传感器和车身加速度传感器等各类传感器的信号输入,控制器对整车的运行信息进行判断,如车辆转弯时控制器发现车身发生侧倾,则对电机2发出指令,电机2输出扭矩,经过传动机构34、摆臂6和车轮总成1的传递,实现车身的反向控制,降低车身离地间隙,恢复车身平衡;随着车辆出弯,传感器检测到车身姿态信号后减小电机2的扭矩输出,维持车身平稳。因此,在使用该实用新型的扭杆弹簧主动悬架系统后,车辆能实现主动侧倾和主动俯仰,提高整车操纵稳定性和平顺性。
[0039]
另外,当使用本实用新型的扭杆弹簧主动悬架系统,能够实现悬架系统的垂向运动控制,可以实现车高的自动调节,从而根据路面的不同设定不同的车高。具体包括:当车辆在崎岖道路上行驶时,通过车身加速度传感器检测车身振动,控制器根据信号判断车辆正在通过坑洼的越野路面,此时控制扭杆弹簧主动悬架系统抬高车身,提高车辆通过性;当车辆在高速路上行驶时,控制器通过轮速传感器判断车辆在平稳的高速路上行驶,此时控制扭杆弹簧主动悬架系统降低车高,降低风阻,减小油耗;而当乘客上下车时,能够控制扭杆弹簧主动悬架系统调整不同的车高,方便上下车和取放物品。当车辆停放在户外时,控制器通过雨量传感器检测到大雨信号,控制扭杆弹簧主动悬架系统抬高车身,避免车辆浸水。
[0040]
本实用新型的扭杆弹簧主动悬架系统,还可以通过语音识别系统,控制器根据识别到的语音或音乐,做出对应的反映。如根据音乐节奏控制车身进行相应节奏的反馈控制,实现各种场景应用。
[0041]
综上所述,本实用新型提供的一种扭杆弹簧主动悬架系统,通过电机2加传动机构34驱动扭杆弹簧7,扭杆弹簧7带动摆臂6运动,从而实现扭杆弹簧主动悬架系统的主动垂向运动,可实现车高自动调节。其中,通过对电机2的扭矩和转速进行控制,可以控制扭杆弹簧7自转角度,进而驱动摆臂6的第二端上下摆动,通过摆臂6的第二端的主动运动可以实现扭杆弹簧主动悬架系统的主动垂向运动,带动车轮总成1垂向运动,实现车身离地间隙的调节。同时,通过设计不同的电机控制策略,可以实现整车的姿态控制、主动侧倾、主动俯仰等场景,提升整车操稳和平顺性。另外,本实用新型提供的一种扭杆弹簧主动悬架系统,还解决了现有主动悬架方案结构复杂,对于布置要求很高的问题。因乘用车轮边的布置空间非常有限,因此简化主动悬架的结构,对于主动悬架的研发非常有必要。
[0042]
本实用新型提供还一种车辆,包括上述的扭杆弹簧主动悬架系统。
[0043]
在本文中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语的具体含义。
[0044]
在本文中,用于描述元件的序列形容词“第一”、“第二”“第三”等仅仅是为了区别属性类似的元件,并不意味着这样描述的元件必须依照给定的顺序,或者时间、空间、等级或其它的限制。
[0045]
在本文中,术语“远”、“近”、“上”、“下”、“前”、“后”、“左”、“右”、“顶”、“底”、“内”、“外”、“竖直”、“水平”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了表达技术方案的清楚及描述方便,因此不能理解为对本实用新型的限制。
[0046]
在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,除了包含所列的那些要素,而且还可包含没有明确列出的其他要素。
[0047]
以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以所述权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。