技术特征:
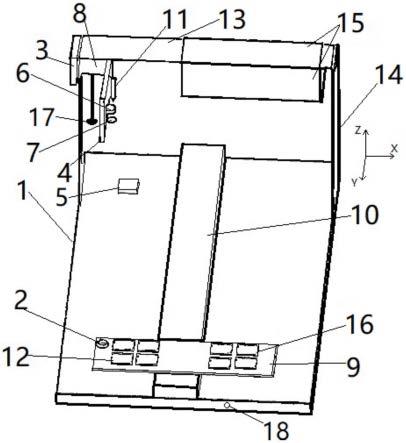
1.一种自动点胶装置,其特征在于,包括:装置主体、控制器与对针模块;所述装置主体上设置有点胶器与移动模块;所述移动模块与所述点胶器传动连接,用于带动所述点胶器相对于待点胶工件沿水平方向与竖直方向移动;所述对针模块包括:对针传感器;所述控制器与所述移动模块和对针传感器均电连接;所述对针传感器用于获取所述点胶器的实时三维数据后发送至所述控制器;所述控制器用于将所述实时三维数据与预设的校准三维数据对比,并根据对比结果控制所述移动模块带动所述点胶器进行补偿校准移动。2.根据权利要求1所述的自动点胶装置,其特征在于,所述装置主体上设置有治具;所述治具上设置有点胶工位与贴合工位;所述点胶工位用于放置所述待点胶工件;所述贴合工位用于放置贴合工件;所述移动模块还用于带动贴合工件沿水平方向与竖直方向移动。3.根据权利要求2所述的自动点胶装置,其特征在于,还包括工位真空控制模块;所述工位真空控制模块包括:调压控制阀与第一真空检测器;所述治具上设置有与所述点胶工位和所述贴合工位一一对应连通的多个真空管道;所述第一真空检测器与所述真空管道连接,且与所述控制器电连接;所述第一真空监测器用于实时检测各个所述真空管道的真空压力,以得到对应的多个第一真空压力数据,并将各个所述第一真空压力数据均发送至所述控制器;所述调压控制阀与各个所述真空管道均连通设置,且与所述控制器电连接;所述控制器还用于根据各个所述第一真空压力数据控制所述调压控制阀实时调整对相对应的所述真空管道的真空输出压力。4.根据权利要求2所述的自动点胶装置,其特征在于,所述点胶工位与所述贴合工位均为凹槽。5.根据权利要求2所述的自动点胶装置,其特征在于,还包括贴合压力控制模块;所述贴合压力控制模块包括:压力传感器;所述压力传感器设置于所述装置主体上,与所述控制器电连接;所述压力传感器用于实时测量贴合工件与待点胶工件贴合时的贴合压力数据,并发送给所述控制器;所述控制器还用于计算所述贴合压力数据与预设压力数据的差值,并根据所述差值通过所述移动模块实时调整所述贴合工件的高度。6.根据权利要求5所述的自动点胶装置,其特征在于,所述贴合压力控制模块还包括:升降器;所述升降器设置于所述装置主体上,且与所述压力传感器传动连接,用于带动所述压力传感器升降。7.根据权利要求2所述的自动点胶装置,其特征在于,还包括贴合头标定模块与贴合头;所述贴合头标定模块包括:第一相机;
所述贴合头与所述移动模块连接,用于拾取所述贴合工件或所述待点胶工件;所述第一相机朝向所述治具,且与所述控制器电连接,用于对所述贴合工件和所述待点胶工件进行视觉定位捕捉从而获取所述贴合工件的吸取坐标和所述待点胶工件的贴合坐标,并将所述吸取坐标与所述贴合坐标发送至所述控制器;所述控制器还用于控制所述贴合头根据所述吸取坐标拾取贴合工件,以及用于控制所述贴合头带动所述贴合工件根据所述贴合坐标与所述待点胶工件贴合。8.根据权利要求7所述的自动点胶装置,其特征在于,还包括真空控制模块;所述真空控制模块包括:第二真空检测器;所述贴合头通过真空吸附的方式拾取所述贴合工件或所述待点胶工件;所述第二真空检测器与所述贴合头和所述控制器均电连接,用于获取所述贴合头吸附所述贴合工件或所述待点胶工件时的第二真空压力数据,并将所述第二真空压力数据发送至所述控制器;所述控制器还用于根据所述第二真空压力数据调整所述贴合头的真空输出压力。9.根据权利要求1所述的自动点胶装置,其特征在于,还包括测高传感器;所述测高传感器与所述控制器电连接,用于测试所述待点胶工件上表面多个预设点的高度数据,并将所述高度数据发送至所述控制器;所述控制器还用于在所述点胶器于所述预设点上进行点胶前,根据所述高度数据控制所述移动模块调整所述点胶器与正下方的预设点的距离值,直至所述距离值满足预设距离要求。10.根据权利要求1所述的自动点胶装置,其特征在于,还包括视觉定位捕捉模块;所述视觉定位捕捉模块包括:第二相机与光源;所述光源朝向所述待点胶工件,且与所述控制器电连接;所述第二相机朝向所述待点胶工件,且与所述控制器电连接,用于根据预导入的点胶图形对所述待点胶工件进行视觉定位捕捉从而获取视觉捕捉后的坐标路径数据,并将所述坐标路径数据发送至所述控制器;所述控制器还用于控制所述移动模块带动所述点胶器沿所述坐标路径数据进行点胶。
技术总结
本申请公开了一种自动点胶装置,包括:装置主体、控制器与对针模块;装置主体上设置有点胶器与移动模块;可以在更换点胶器等需校准点胶器位置的情况下,通过移动模块将点胶器移动至对针传感器的感应范围后,通过对针传感器获取点胶器的实时三维数据并传输至控制器,使得控制器可以对比实时三维数据与预设的校准三维数据是否存在偏差,并在存在偏差的情况下计算出补偿移动距离后控制移动模块带动点胶器进行补偿校准移动,实现点胶器的自动复位,确保前后点胶器高度一致性,从而提升点胶效率和点胶质量,解决现有点胶机无法自动对齐点胶器的问题。器的问题。器的问题。
技术研发人员:侯威 吴成文 李晓军
受保护的技术使用者:广东粤港澳大湾区国家纳米科技创新研究院
技术研发日:2022.01.24
技术公布日:2022/7/8
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。