1.本发明涉及深度学习领域,更具体地,涉及一种基于图卷积神经网络的在时间差分流体仿真器仿真过程中修正仿真结果的方法。
背景技术:
2.仿真技术是当代数字化、信息化浪潮下装备装置制造过程中的核心技术之一,其在数字空间中计算模拟装备装置的物理演变过程及结果,是装备装置研发的重要工具。
3.流体仿真在水面、水底装备装置的研发中扮演着非常重要的作用。现有流体仿真器大多通过求解复杂偏微分方程,连续性方程、动量方程或能量方程,计算流体在不同时刻的状态,为了降低计算时间复杂度和资源依赖度,目前发展出一些时间差分的方法,通过上一步仿真状态和约简后的方程求解下一步仿真状态。
4.需要随着深度学习的发展,流体仿真借助深度学习工具发展出了在物理方程约束下学习的用于拟合流体方程的神经网络;为了提高神经网络在不同时刻的泛化能力,此类方法大多采用也基于时间差分的方法,使网络输入不依赖于时间变量。虽然时间差分方法目前有广泛的应用,但是其依赖于上一步仿真的结果,存在误差传播现象,仿真误差在多步仿真之后容易累积,造成仿真失真、失效。
技术实现要素:
5.本发明为缓解上述问题,提出一种基于图卷积神经网络的在时间差分流体仿真器仿真过程中修正仿真结果的方法。
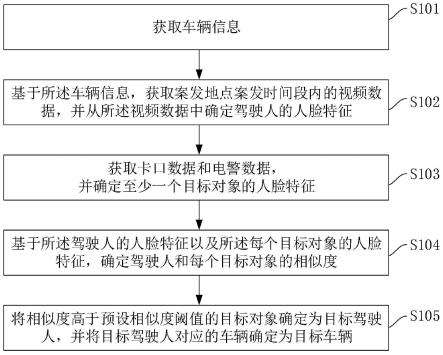
6.为解决上述问题,本发明提出的技术方案是:一种基于图卷积神经网络的修正方法。首选,时间差分流体仿真器输出第i步推理结果,表示为矩阵ai;其次,将矩阵ai输入到标准化模块中,进行数据标准化,之后用编码器进行编码,之后再用图卷积计算一阶修正编码结果,剥离出一阶编码误差,再之后用图卷积计算二阶修正编码结果及剥离出二阶编码误差,之后对一阶编码误差和二阶编码误差进行融合编码,再之后对融合编码的误差进行解码,生成真实标准化仿真误差推算出标准化仿真结果,并反标准化后得到修正仿真结果
7.进一步的,矩阵ai∈rn×d,其中n表示网格数,也即图的节点数,d表示仿真问题的维度,对于二维平面问题,令d=3,表示x方向与y方向的速度以及压力值;对于三维问题,令d=4,表示x方向、y方向与z方向的速度以及压力值。
8.进一步的,将矩阵ai使用训练过程中累积计算的训练数据的均值与标准差标准化,具体来说,令累积计算的均值为标准差为标准化表示为:
[0009][0010]
是一种广播机制的计算。
[0011]
进一步的,将标准化之后的值传入编码器编码,编码器是单层全连接网络,带有偏置项。网络的输入输出尺寸[d,512],编码器输出表示为:
[0012][0013]
其中w0∈rd×
512
,是网络学习的参数。
[0014]
进一步的,将上一步网络输出传入图卷积网络,剥离出一阶修正编码结果。其过程用公式表示为:
[0015][0016]
其中表示使用同尺寸单位矩阵相加增强了自连接的节点的邻接矩阵,邻接关系通过时间差分仿真器使用的网格定义,为双向邻接;表示矩阵的度矩阵,是一个对角矩阵;w1表示投影矩阵,其维度为[512
×
512];由此,剥离出的一阶编码误差表示为:
[0017]
l1=h
1-h2,l1∈rn×
512
[0018]
进一步的,将上一步网络输出再传入下一个图卷积,剥离出二阶修正编码结果。其过程用公式表示为:
[0019][0020]
其中与上一步一致,表示使用同尺寸单位矩阵相加增强了自连接的节点的邻接矩阵;表示矩阵的度矩阵,是一个对角矩阵;w2表示投影矩阵,其维度为[512
×
512];由此,剥离出的二阶编码误差表示为:
[0021]
l2=h
1-h2,l2∈rn×
512
[0022]
进一步的,对上述步骤得到的一阶和二阶误差做融合编码变换,整合两个误差,并做非线性变换以筛选编码误差。通过单层全连接网络实现,表示为:
[0023][0024]
其中,w3∈r
512
×
1024
,是可学习参数,σ为激活函数。
[0025]
进一步的,对上述编码误差进行进一步解码,解码出其过程是单层全连接网络,可以表示为:
[0026]
[0027]
进一步的,将上一步误差从剥离,得到修正后的标准化结果可以表示为:
[0028][0029]
进一步的,对修正的结果反标准化,得到最终修正的仿真结果可以表示为:
[0030][0031]
进一步的,上述参数的训练过程包含以下几点步骤:
[0032]
s1.构建m个训练样本的样本集其中为非时间差分仿真方法得到的更为准确的结果。
[0033]
s2.输入时间差分仿真器的当前仿真结果矩阵ai,通过上述步骤[0006-00012]处理得到修正结果以及剥离出的误差
[0034]
s3.定义修正数据损失l
data
为:
[0035][0036]
其中,表示第i步仿真的正确结果,是监督数据,直接在训练数据中给出。
[0037]
s4.定义数据流形正则损失l
mani
为:
[0038][0039]
其中tr表示矩阵的迹,表示图的对称标准化后的拉普拉斯矩阵。
[0040]
s5.定义噪声正则损失l
noise
为:
[0041][0042]
s6.定义训练损失为数据损失,流形正则损失以及噪声正则损失的组合,训练损失loss表示为:
[0043]
loss=l
data
αl
mani
βl
noise
[0044]
其中α,β为超参数,平衡损失的影响。
[0045]
s7.使用反向传播计算参数梯度,并使用adam优化算法更新参数。
[0046]
s8.使用s中的样本重复训练过程,进行迭代训练。
[0047]
与现有技术相比,本方法的优点是:
[0048]
(1)本方法基于图卷积神经网络生成修正结果,该方法依赖时间差分仿真方法中使用的网格计算节点的邻接关系,与时间差分方法可以高效插接;同时,得益于图卷积神经网络天然的数据平滑能力,可以有效修正误差。
[0049]
(2)本方法仅依赖于少量图卷积网络与全连接网络,在计算上大量使用矩阵、向量
操作,可以使用图形计算卡加速计算,在修正过程中耗费时间少,计算效率高,在工程中有良好的部署应用能力。
附图说明
[0050]
图1表示基于图卷积的修正方法流程图,描述了修正方法的具体流程。
[0051]
图2表示基于本专利方法实施时间差分仿真器仿真过程修正的流程。
[0052]
具体实现方式
[0053]
附图仅用于示例性说明,不能理解为对本发明的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际方法;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。附图中描述位置关系仅用于示例性说明,不能理解为对本发明的限制。
[0054]
实施实例1:
[0055]
如图1、2所示,在实施基于gcn的修正时间差分流体仿真器推理过程的方法中,流程可以分为三个部分:
[0056]
1、训练数据的收集与处理。
[0057]
步骤一,设置仿真场景参数,包括仿真维度、入场速度、空间边界、障碍模型,流体黏度、流体密度等。
[0058]
步骤二,使用非时间差分仿真方法基于仿真参数求解流体多步精确仿真结果;数据包含仿真网格坐标、格点的连接关系、网格格点的类型,如流入场点、流出场点、障碍物点、边界点等,以及网格格点上的速度值及压力值,将以上数据作为修正方法的目标数据。
[0059]
步骤三,给定仿真网格格点坐标、格点类型、流入场条件和边界条件,使用时间差分流体仿真器进行仿真,仿真出多步结果,作为修正方法的输入数据。
[0060]
2、修正方法中参数的训练。
[0061]
步骤一,在输入数据中进行均匀不放回随机采样同一仿真时刻的输入数据和目标数据对作为样本,将采样得到的样本的输入数据作为网络输入。
[0062]
步骤二,将采样得到的样本的输入数据输入到修正方法,得到修正后的样本。
[0063]
步骤三,结合修正的输出、目标数据计算数据损失、流形正则损失和噪声正则损失,并通过加权求和计算得到最终损失。
[0064]
步骤四,对损失反向传播,计算个参数的梯度。
[0065]
步骤五,使用优化算法,如adam,更新参数。
[0066]
步骤六,重复以上步骤,继续采样样本,直到达到预设训练次数。
[0067]
3、基于修正方法进行多步仿真。
[0068]
步骤一,输入时间差分仿真器当前步仿真结果,得到下一步的初步仿真结果。
[0069]
步骤二,将初步仿真结果输入到修正方法进行修正,得到修正结果作为下一步的仿真结果。
[0070]
步骤三,更新仿真结果入场流状态,作为下一步时间差分仿真器的输入。
[0071]
步骤四,重复执行步骤1,直到达到指定的仿真时间步数。
[0072]
显然,本发明的上述实施实例仅仅是为清楚地说明本发明所作的举例,而并非是对本发明的实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还
可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明权利要求的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。