1.本发明涉及在逆变器上运行三相电感式负载,其中,有效电流由脉冲宽度调制预给定。
背景技术:
2.在将电能转换为机械能的电驱动系统中,优选使用三相或多相交流电发动机,其具有高效率并且与直流发动机相比不需要易磨损的电刷。这种驱动系统例如在电梯中、在泵中以及在电驱动的车辆的驱动动力总成系统中使用。然而,能够在车辆中携带的电能量源(例如电池或燃料电池)通常提供直流电压。对于工业应用,大多利用三相交流电流,其利用整流器进行整流。
3.为了将直流电压转换为三相或多相交流电压,使用逆变器。
4.在此,在牵引运行(fahrbetrieb)中,对扭矩和对转速的要求不断变化。如此,为了加速需要更高的转速,并且为了在斜坡上保持速度需要更高的扭矩。逆变器可以在宽的范围内不仅改变交流电流的频率而且改变该交流电流的有效电流强度。然而,通过逆变器中的功率半导体的快速节拍来转换成交流电流花费能量。de 10 2004 027 629 a1公开了一种用于进行脉宽调制的方法,利用该方法,在通过逆变器产生正弦形的三相交流电压时,可以节省一部分开关损耗。
技术实现要素:
5.在本发明的范畴内,开发了一种用于运行逆变器的方法,所述逆变器通过对布置在三个半桥中的开关元件的操控将电感式负载(例如同步机)的三个交流相分别可选地与在所述逆变器的输入端处提供的(vorgelegten)直流电压的正极或负极连接。开关元件尤其可以例如构造为功率半导体。在此,通过旋转的空间矢量调制来改变所述开关元件的开关状态。在空间矢量表示中,在所述三个相上的电流分布一方面通过空间矢量的量值、实部或虚部来表征,并且另一方面通过空间矢量相对于坐标轴的角度来表征。在这种情况下,“循环”尤其意味着,通过调制总是再次产生新的、合成的空间矢量,并且其角度在一致的旋转方向上持续地发生变化。
6.由于每个半桥仅能将配属于其的交流相要么与直流电压的正极要么与该直流电压的负极连接,因此利用开关元件的静态开关状态仅能表示最多23=8个不同的空间矢量。这些空间矢量独自不足以例如驱动电动机以进行旋转。为此还需要多个另外的空间矢量,其位于几个可调设的空间矢量之间。在空间矢量调制的范畴内,通过交替地施加可调设的空间矢量(所述空间矢量在角度的正的或负的方向上或者在零状态中是相邻的)以脉冲宽度调制产生分别位于这些可调设的空间矢量之间的另外的空间矢量。在关于至少一个半桥具有相应开关元件的相同开关状态的空间矢量之间进行调制时,现在这样的半桥保持完全关断。
7.在常规的空间矢量调制中,仅允许如下开关状态:在所述开关状态中,每个半桥将配属于其的相要么与直流电压的正极要么与该直流电压的负极连接。因此,在每个半桥中总是恰好一个开关元件接通并且另一个开关元件关断。半桥的两个开关元件均关断的开关状态不会出现。恰好这样的开关状态的引入改变了分别所属的空间矢量并且因此导致如下:流过交流相的电流的在空间矢量调制中最终形成的时间变化过程偏离了正弦形状。相对应地(im gegenzug),省去了在完全关断的半桥上的所有开关过程。已经认识到,尤其是在操控电感式负载时,偏离正弦形状在许多情况下不损害由负载分别施加的功能。因此,能够以所描述的方式“有损压缩”开关过程的时间程序。这种情况在一定程度上与图像、音频数据和视频数据的压缩是可类比的,其中,从无损压缩方法到有损压缩方法的转变将压缩的效率提高到新的数量级。
8.在一个特别有利的构型中,在空间矢量图中的如下连续的扇区内,这样的半桥保持完全关断:在所述连续的扇区中,配属于至少一个半桥的开关元件的开关状态保持相同。在此,“连续的”应以空间矢量的角度的正的或负的方向理解。
9.已经认识到,在空间矢量图中,在角度的正的或负的方向上存在第一、第二和第三空间矢量的顺序,如此,使得通过改变第一半桥的开关状态可以从第一空间矢量更换为第二空间矢量,并且通过随后改变第二半桥的开关状态可以从第二空间矢量更换为第三空间矢量。因此,在由第一空间矢量和第三空间矢量所包围的扇区中,进展(fortschritt)在总体上仅由两个半桥的开关状态的改变来表征。第三半桥的开关状态因此不添加任何其他信息,并且当第三半桥保持完全关断时不丢失任何重要信息(wesentliches)。
10.在另一有利的构型中,空间矢量调制仅在所谓的有源空间矢量之间进行。有源空间矢量代表如下状态:在所述状态中,在所述交流相中的至少两个之间施加不同于零的电压。此外,还存在所谓的零电压空间矢量,其代表如下状态:在所述状态中,所有三个交流相彼此短接。如果要通过空间矢量调制产生正弦形的旋转场,则也需要这些零电压空间矢量。然而,由于在该方法的范畴内通过完全关断半桥对所产生的交流电流的精确的正弦形状的背离总归已经是“完成的事情”,因此同样可以省去施加零电压空间矢量所需的开关过程。
11.在一个特别有利的构型中,将空间矢量调制控制和/或调节到如下目标上:具有预给定有效值的三相的交流电流流过电感式负载,该交流电流在旋转场的意义上换向。尤其是在这样的应用中,只要有效值对应于预给定,电流在交流电流的周期内的精确的时间变化过程就并不重要。因此,该时间变化过程的“修饰”以形成正弦形状对于电感式负载的技术功能来说不是必需的,而是仅花费开关过程。
12.尤其有利地,电感式负载可以是电动机。为了激励和维持电动机的旋转,仅需在任何时刻在定子和转子之间产生合成的磁力,该磁力继续驱动所述旋转。这不一定以发动机的磁线圈的激励随时间具有精确的正弦曲线为先决条件。
13.在另一特别有利的构型中,以星形连接方式运行发动机。这意味着,由三个交流相供电的发动机的三个绕组具有一个共同的星点。这个星点没有接地。
14.在这种配置中,例如从直流电压的正极出发从逆变器的一个半桥流过发动机的绕组的电流仅能通过其他两个绕组到达逆变器的其他半桥并从那里最终返回直流电压的负极,以便闭合电路。半桥的完全关断在此具有如下效果:仅还有一个半桥而不是两个半桥可供用于回引直流电压的负极。然而,这意味着,在从星点到负极的路径上电流不再需要克服
其他两个绕组的并联连接,而是所述绕组中的一个特定绕组。由于每个绕组都具有不可避免的阻抗,因此电流必须克服在整体上更高的阻抗。
15.这导致,在每个绕组上电压下降较少,并且因此在总体上在发动机中转换较少的电功率。同时,在逆变器的开关元件上电压也分别下降得较少。如果这些开关元件是功率半导体(例如晶体管),则降低了这些半导体的导通损耗(所述导通损耗还添加至开关损耗)。导通损耗不仅取决于开关元件上的电压降而且取决于分别允许通过的电流。
16.相反,降低的功耗意味着,发动机可以提供更少的机械功率。在全负载运行中,发动机的功能将因此减少。然而,该方法是专门针对发动机和其他电感式负载的部分负载运行和空载运行而考虑的。
17.已经认识到,尤其是在电动机的部分负载运行或者甚至空载运行中,开关损耗在总损耗中的比例显著增加:如果所要求的有效电流减少为二十分之一,则开关损耗根据现有技术仅减少为二分之一。在空载运行中,由此可以将逆变器的效率降低到25%以下。在此,现在以电流的时间变化过程或多或少明显地偏离正弦形的三相的交流电流为代价引起了显著的改善。但是,电流的电流纹波不受影响,因为pwm频率仍然保持固定。然而,尤其是在部分负载运行和空载运行中,由于电阻增加以及可能附加地由于偏离正弦形状而引起的电动机最大功率输出的降低并不显著。更重要的是逆变器的效率的改善。
18.许多驱动系统通常仅在其运行时间的非常小的比例内以最高速度运行。因此,部分负载运行和空载运行共同构成电动动力总成系统的运行时间的最大部分。利用所提出的方法,在部分负载运行中系统的效率得到显著改善。
19.因此,通过减少开关损耗节省大量能量,这特别是在车辆的驱动动力总成系统中的应用中是有利的。由于车辆通常携带有限的能量储备,因此节省的能量也反映在增加的有效距离上。
20.因此,有利地,选择电感式负载的如下运行阶段:在所述运行阶段中,电感式负载以其额定功率的最大20%、优选最大10%、非常特别优选最大5%运行。
21.特别地,该方法可以完全或部分地是计算机实现的。因此,本发明还涉及一种具有机器可读指令的计算机程序,当在一个或多个计算机上实施所述指令时,所述指令促使所述一个或多个计算机实施该方法。在这个意义上,同样能够实施机器可读指令的用于车辆的控制设备和用于技术设备的嵌入式系统也应视为计算机。
22.同样地,本发明还涉及一种具有计算机程序的机器可读的数据载体和/或下载产品。下载产品是能够通过数据网络传输的数字产品,即能够由数据网络的用户下载的数字产品,其例如可以在在线商店中出售以立即下载。
23.此外,计算机可以配备有计算机程序、机器可读的数据载体或下载产品。
附图说明
24.下面,与对本发明的优选实施例的描述共同地借助附图更详细地示出改善本发明的另外的措施。
25.附图示出:
26.图1:方法100的实施例;
27.图2:空间矢量调制的图示说明;
28.图3:方法100在具有电动机作为电感式负载4的逆变器1上的示例性应用。
具体实施方式
29.图1图示说明了用于运行逆变器1的方法100的实施例。逆变器1本身在图3中更详细地示出。在步骤110中,通过旋转的空间矢量调制来改变逆变器1的开关元件3a-3f的开关状态。根据步骤120,恰好在调制中所使用的空间矢量6a-6f为其预给定相同开关状态的半桥5a-5c分别保持完全关断。
30.在此,在该实施例中,在步骤105中选择电动机作为电感式负载4。根据框105a,以与未接地的星点8的星形连接运行该电动机。
31.在步骤106中,选择电感式负载4的部分负载运行阶段4'作为如下运行阶段:在所述运行阶段中,半桥5a-5c保持完全关断并且在这方面修改旋转的空间矢量调制。
32.在方框110内示例性示出了可以如何更详细地构型旋转的空间矢量调制。
33.根据框111,空间矢量调制尤其仅在有源(aktive)空间矢量6a-6f之间进行。与所谓的零电压空间矢量相反,有源空间矢量代表如下状态:在所述状态中,在交流相u、v、w中的至少两个之间施加不同于零的电压。如果不使用任何零电压空间矢量,则有利地减小共模电流。
34.根据框112,空间矢量调制尤其可以通过对应的控制和/或调节而指向如下目标:具有预给定有效值的三相的交流电流4a流过电感式负载4,该交流电流在旋转场的意义上换向。
35.根据方框121,在空间矢量图中的连续的扇区7内(在该扇区中,配属于至少一个半桥5a-5c的开关元件3a、3d;3b、3e;3c、3f的开关状态保持相同),这样的半桥5a-5c可以保持完全关断。
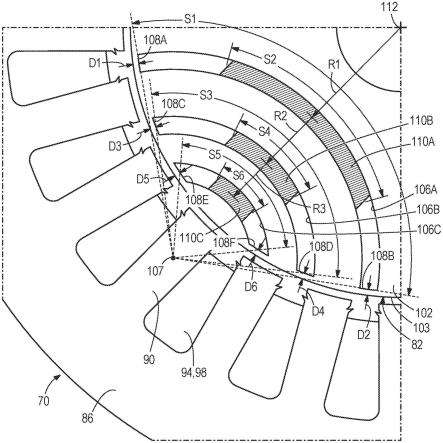
36.图2图示说明了空间矢量图上的空间矢量调制。标出了六个有源空间矢量6a-6f。坐标轴表代表复数的交流电压u*的实部和虚部。在表1中说明了半桥5a-5c及其开关元件3a-3f的所属的开关状态。
[0037][0038]
表1:空间矢量调制(在不禁用半桥5a-5c的情况下)
[0039]
在角度的正旋转方向上彼此跟随的空间矢量6a、6b和6c具有如下共同点:半桥5c的两个开关元件3c和3f分别保持在相同的开关状态中。因此,空间矢量6a和6c包围了如
下扇区7a:在所述扇区中,半桥5c的开关状态是恒定的。如果现在在这个在表1中通过粗框标记的扇区7内半桥5c保持完全关断(即两个开关元件3c和3f持续地“关”),则省去两个开关过程:在从空间矢量6c转变为空间矢量6d时,开关元件3f不必关断,因为该开关元件已经为关。同样,在从空间矢量6f转变为空间矢量6a时,开关元件3f不必接通,因为该开关元件应该保持关断。
[0040]
类似地,空间矢量6c和6e包围第二扇区7b,在所述第二扇区中,第一半桥5a的开关状态是恒定的。在这个在表1中通过点线边框标记的扇区7b内,第一半桥5a可以保持完全关断。
[0041]
空间矢量6e和6a包围第三扇区7c,在所述第三扇区中,第二半桥5b的开关状态是恒定的。在这个在表1中通过划线边框标记的扇区7c内,第二半桥5b可以保持完全关断。
[0042]
这些改变决定了,由电感式负载4驱动的交流电流4a的最终时间变化过程或多或少显著偏离正弦形状。对于正弦形的输出电流,仅能使用在空间矢量图中位于圆k上的空间矢量。这将不仅需要所有三个半桥5a-5c的有源开关,而且将需要添加零电压空间矢量。由此,在总体上将需要开关元件3a-3f的更多开关过程。
[0043]
半桥5a-5c的完全关断导致,仅空间矢量6b、6d和6f可以利用全部额定电压u1进行切换。因此,脉冲宽度调制仅能在三个空间矢量6b、6d和6f之间进行调制。因此,利用脉冲宽度调制仅能产生这样的、合成的空间矢量:所述空间矢量在空间矢量6b、6d和6f的端点之间的划线连接路段上结束。这对应于降低的电压u2。在此反映出,如上所述,以星形连接运行的电动机的电阻变得更大。
[0044]
图3a示出了由逆变器1和作为电感式负载4的电动机组成的完整结构。逆变器1在其输入端la处接收直流电压2,并在其输出端lb处输出具有相u、v和w的交流电流4a。相u通过第一半桥5a操控,并在那里可选地通过开关元件3a与直流电压2的正极连接或通过开关元件3d与所述直流电压的负极连接。相v通过第二半桥5b操控,并在那里可选地通过开关元件3b与直流电压2的正极连接或通过开关元件3e与所述直流电压的负极连接。相w通过第三半桥5c操控,并在那里通过开关元件3c与直流电压2的正极连接或通过开关元件3f与所述直流电压2的负极连接。
[0045]
相u、v、w中的每个为电动机4的绕组11、12、13之一馈电,其中,这三个绕组11、12、13具有一个共同的未接地的星点8。绕组11、12、13不仅有电感l,而且具有与其串联的欧姆电阻ru、rv或rw。
[0046]
图3b示出了在没有根据该方法所设置地关断整个半桥5a-5c的情况下这些欧姆电阻的作用。例如,如果引导交流电流4a从直流电压2的正极开始,经由第一半桥5a,通过带有电阻ru的第一绕组11,则仅能通过由带有电阻rv的绕组12和带有电阻rw的绕组13组成的并联连接回引到负极。
[0047]
图3c示出了,第三半桥5c的完全断开如何对总电阻产生影响。对于回引,现在仅带有电阻rv的第二绕组12还可供使用。因此,总电阻变得更大。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。