技术特征:
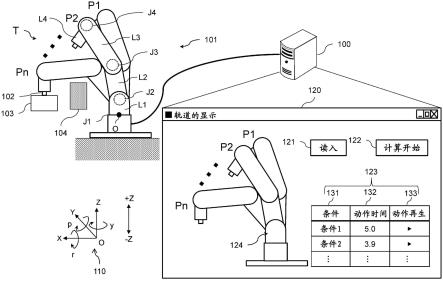
1.一种轨道计划生成装置,其具有执行程序的处理器和存储所述程序的存储设备,所述轨道计划生成装置生成具有多个关节的机器臂的前端部从起点向终点移动的轨道计划,其特征在于,所述处理器执行如下处理:第一搜索处理,搜索从第一轨道信息起的预定距离内的成为所述前端部的移动目的地的多个位置候选,其中,所述第一轨道信息表示从所述起点到所述终点之间的所述前端部的位置以及姿势;第二搜索处理,搜索通过球面插补而在容许范围内变化的所述前端部的多个姿势候选,其中,所述球面插补基于所述起点和所述终点处的所述前端部的姿势;决定处理,基于通过所述第一搜索处理搜索到的多个位置候选以及通过所述第二搜索处理搜索到的多个姿势候选,决定从所述第一轨道信息起的表示所述前端部的移动目的地的位置以及姿势的第二轨道信息;以及输出处理,输出包含所述第一轨道信息以及通过所述决定处理决定出的第二轨道信息的轨道数据。2.根据权利要求1所述的轨道计划生成装置,其特征在于,针对多个所述位置候选中的每一个执行计算处理,该计算处理计算与距所述第一轨道信息的距离相关的成本,在所述决定处理中,所述处理器基于通过所述计算处理计算出的多个成本来决定所述第二轨道信息的位置。3.根据权利要求2所述的轨道计划生成装置,其特征在于,在所述决定处理中,所述处理器将成为多个所述成本中的最小成本的计算源的位置候选决定为所述第二轨道信息的位置。4.根据权利要求1所述的轨道计划生成装置,其特征在于,针对多个所述姿势候选中的每一个执行计算处理,该计算处理计算与所述第一轨道信息起的姿势变化相关的成本,在所述决定处理中,所述处理器基于通过所述计算处理计算出的多个成本来决定所述第二轨道信息的姿势。5.根据权利要求4所述的轨道计划生成装置,其特征在于,在所述决定处理中,所述处理器将成为多个所述成本中的最小成本的计算源的姿势候选决定为所述第二轨道信息的姿势。6.根据权利要求1所述的轨道计划生成装置,其特征在于,所述轨道计划生成装置执行如下处理:计算处理,针对多个所述位置候选中的每一个,计算出所述多个关节的旋转角;以及判定处理,基于配置于所述机器臂所存在的空间的障碍物的构造数据,判定在基于所述计算处理的计算结果的所述机器臂的多个姿势的各个姿势下,所述机器臂是否与所述障碍物产生干涉,在所述决定处理中,所述处理器基于所述判定处理的判定结果来决定所述第二轨道信息。7.根据权利要求1所述的轨道计划生成装置,其特征在于,
所述处理器执行使所述第一轨道信息与所述第二轨道信息之间的轨道平滑化的平滑化处理,在所述输出处理中,所述处理器输出所述平滑化处理的平滑化后的轨道数据。8.根据权利要求7所述的轨道计划生成装置,其特征在于,在所述平滑化处理中,所述处理器基于预定的制约来生成插补曲线,更新所述第一轨道信息中的所述多个关节的关节角度和所述第二轨道信息中的所述多个关节的关节角度,以便接近所述插补曲线,其中,插补曲线是连接所述起点以后且所述第一轨道信息之前的第三轨道信息中的所述多个关节的关节角度与所述第二轨道信息之后且所述终点之前的第四轨道信息中的所述多个关节的关节角度之间而成的线。9.根据权利要求8所述的轨道计划生成装置,其特征在于,所述预定的制约是所述第三轨道信息中的所述多个关节的角速度与所述第四轨道信息中的所述多个关节的角速度之差在容许范围内。10.根据权利要求8所述的轨道计划生成装置,其特征在于,所述预定的制约是所述第三轨道信息中的所述多个关节的角加速度与所述第四轨道信息中的所述多个关节的角加速度之差在容许范围内。11.根据权利要求8所述的轨道计划生成装置,其特征在于,在所述平滑化处理中,所述处理器基于配置于所述机器臂所存在的空间的障碍物的构造数据,判定在基于所述第一轨道信息中的更新后的所述多个关节的关节角度和所述第二轨道信息中的更新后的所述多个关节的关节角度的所述机器臂的姿势下,所述机器臂是否与所述障碍物发生干涉,在判定为所述机器臂不与所述障碍物发生干涉的情况下,根据所述第一轨道信息中的更新后的所述多个关节的关节角度和所述第二轨道信息中的更新后的所述多个关节的关节角度,更新所述第一轨道信息以及所述第二轨道信息。12.根据权利要求1所述的轨道计划生成装置,其特征在于,所述处理器执行赋予处理,该赋予处理基于所述关节的速度制约,赋予所述机器臂以成为从所述第一轨道信息向所述第二轨道信息的轨道的方式动作的控制时间。13.根据权利要求12所述的轨道计划生成装置,其特征在于,在所述赋予处理中,所述处理器在不满足所述速度制约的情况下,对从所述第一轨道信息向所述第二轨道信息的轨道赋予追加时间。14.一种轨道计划生成方法,其由轨道计划生成装置执行,所述轨道计划生成装置具有执行程序的处理器和存储所述程序的存储设备,并生成具有多个关节的机器臂的前端部从起点向终点移动的轨道计划,其特征在于,所述轨道计划生成方法使所述处理器执行如下处理:第一搜索处理,搜索从第一轨道信息起的预定距离内的成为所述前端部的移动目的地的多个位置候选,其中,所述第一轨道信息表示从所述起点到所述终点之间的所述前端部的位置以及姿势;第二搜索处理,搜索通过球面插补而在容许范围内变化的所述前端部的多个姿势候选,其中,所述球面插补基于所述起点和所述终点处的所述前端部的姿势;决定处理,基于通过所述第一搜索处理搜索到的多个位置候选以及通过所述第二搜索处理搜索到的多个姿势候选,决定从所述第一轨道信息起的表示所述前端部的移动目的地
的位置以及姿势的第二轨道信息;以及输出处理,输出包含所述第一轨道信息以及通过所述决定处理决定出的第二轨道信息的轨道数据。15.一种轨道计划生成程序,使处理器执行具有多个关节的机器臂的前端部从起点向终点移动的轨道计划的生成,其特征在于,所述轨道计划生成程序使所述处理器执行如下处理:第一搜索处理,搜索从第一轨道信息起的预定距离内的成为所述前端部的移动目的地的多个位置候选,其中,所述第一轨道信息表示从所述起点到所述终点之间的所述前端部的位置以及姿势;第二搜索处理,搜索通过球面插补而在容许范围内变化的所述前端部的多个姿势候选,其中,所述球面插补基于所述起点和所述终点的所述前端部的姿势;决定处理,基于通过所述第一搜索处理搜索到的多个位置候选以及通过所述第二搜索处理搜索到的多个姿势候选,决定从所述第一轨道信息起的表示所述前端部的移动目的地的位置以及姿势的第二轨道信息;以及输出处理,输出包含所述第一轨道信息以及通过所述决定处理决定出的第二轨道信息的轨道数据。
技术总结
一种轨道计划生成装置,生成具有多个关节的机器臂的前端部从起点向终点移动的轨道计划,轨道计划生成装置执行:第一搜索处理,搜索从第一轨道信息起的预定距离内的成为前端部的移动目的地的多个位置候选,其中,第一轨道信息表示从起点到终点之间的前端部的位置以及姿势;第二搜索处理,搜索通过球面插补而在容许范围内变化的前端部的多个姿势候选,其中,球面插补基于起点和终点的前端部的姿势;决定处理,基于通过第一搜索处理搜索到的多个位置候选以及通过第二搜索处理搜索到的多个姿势候选,决定从第一轨道信息起的表示前端部的移动目的地的位置以及姿势的第二轨道信息;以及输出处理,输出包含第一轨道信息及通过决定处理决定出的第二轨道信息的轨道数据。定处理决定出的第二轨道信息的轨道数据。定处理决定出的第二轨道信息的轨道数据。
技术研发人员:山内雄太 中须信昭
受保护的技术使用者:株式会社日立制作所
技术研发日:2020.08.13
技术公布日:2022/7/10
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。