1.本发明涉及一种取种装置,属于农产品种子设备技术领域。
背景技术:
2.甜瓜又称香瓜、哈密瓜等。是葫芦科一年生蔓性草本植物。茎、枝有棱。卷须纤细,单一,被微柔毛。叶柄长具槽沟及短刚毛;叶片厚纸质,上面粗糙,被白色糙硬毛。花单性,雌雄同株。雄花:数朵簇生于叶腋;花梗纤细;花冠黄色;雌花:单生,花梗粗糙,被柔毛;子房长椭圆形。
3.现有技术中,依靠负压气流抽取种子,容易吸取外部空气杂质,从而导致称重不准确。
4.怎样研究出甜瓜取种器是当前亟待解决的问题。
技术实现要素:
5.本发明的主要目的是为了解决现有技术依靠负压气流抽取种子,容易吸取外部空气杂质,从而导致称重不准确的问题,而提供的甜瓜取种器。
6.本发明的目的可以通过采用如下技术方案达到:
7.甜瓜取种器,包括壳体和设置于其内壁的收紧组件,所述收紧组件底部设置有两组单臂组件,所述单臂组件包括夹臂和设置于其内壁的转框,所述转框为三棱柱结构,所述转框外壁设置有多个滤过板,所述转框中间设置有轴套,所述轴套内壁设置有芯轴,所述芯轴两端设置有环节头,其中一个所述环节头外壁设置有回转电机,所述回转电机的输出轴与所述芯轴一端套接,所述夹臂两侧设置有阶梯槽,所述环节头和所述芯轴均滑动连接于所述阶梯槽内壁,所述夹臂一侧设置有两个软罩,所述软罩一侧设置有挡板,所述挡板一侧设置有压缩杆,所述压缩杆的活塞杆与所述夹臂固定相连。
8.进一步的,所述收紧组件包括固定连接于所述壳体顶部内壁的吊轨和设置于所述吊轨底部的两个电动滑块,所述电动滑块底部设置有支架,所述支架与所述夹臂固定相连。
9.进一步的,所述吊轨顶部设置有卷收盒,所述卷收盒内部设置有蓄电池和卷收电机,且外壁设置有动力轴,所述动力轴一端设置有卷收轮。
10.进一步的,所述支架一侧设置有定滑轮,所述环节头一侧设置有栓头,所述夹臂顶部设置有穿线孔,所述栓头、所述定滑轮和所述卷收轮外壁均设置有绳索。
11.进一步的,两个所述夹臂之间设置有活动盒,所述活动盒两侧内壁均设置有支撑缸,所述支撑缸的外侧设置有活塞板,所述活塞板滑动连接于所述夹臂一侧内壁。
12.进一步的,所述活动盒底部设置有栅栏板,所述栅栏板底部活动连接于所述转框外壁,所述栅栏板两侧设置有栅格槽。
13.进一步的,所述壳体底部固定连接有壳板,所述壳体一侧设置有联通管,所述联通管一端设置有阀体。
14.进一步的,所述阀体一端出口设置有导流管,所述导流管与所述壳板联通,所述阀
栅栏板,27-吊柱,28-称重板,29-弹簧杆,30-搭板。
具体实施方式
28.为使本领域技术人员更加清楚和明确本发明的技术方案,下面结合实施例及附图对本发明作进一步详细的描述,但本发明的实施方式不限于此。
29.如图1-图9所示,本实施例提供的甜瓜取种器,包括壳体2和设置于其内壁的收紧组件,收紧组件底部设置有两组单臂组件,通过设置收紧组件和单臂组件,其中收紧组件带动单臂组件相对运动,从而收紧单臂组件的距离,收拢甜瓜种子,然后利用单臂组件构建的闭合空间,将收拢种子逐步抬升至高处,并通过收紧组件将种子进行暂存,实现种子的保存,方便后续进行转移和释放,同时单臂组件底端依靠自身结构能够转动,在推动种子靠拢的同时,避免种子留存于装置死角中,同时避免现有技术中,依靠负压气流抽取种子,容易吸取外部空气杂质,从而导致称重不准确的问题;单臂组件包括夹臂8和设置于其内壁的转框19,转框19为三棱柱结构,转框19外壁设置有多个滤过板22,转框19中间设置有轴套23,轴套23内壁设置有芯轴21,芯轴21两端设置有环节头,其中一个环节头外壁设置有回转电机20,回转电机20启动,带动转框19底面与地面平行,然后其相对斜面能够推动种子抬升聚拢,然后绳索带动环节头运动,通过拉动芯轴21带动转框19上移,使得种子堆进入分离区域;回转电机20的输出轴与芯轴21一端套接,夹臂8两侧设置有阶梯槽,环节头和芯轴21均滑动连接于阶梯槽内壁,夹臂8一侧设置有两个软罩17,软罩17一侧设置有挡板18,挡板18一侧设置有压缩杆24,压缩杆24的活塞杆与夹臂8固定相连;进一步的,在夹臂8靠近时,利用压缩杆24复位特性,带动挡板18相对贴合,使得种子抬升区域的封闭性,避免种子从转框19两侧滑落,同时阶梯槽能够对芯轴21和环节头进行限位,避免转框19上移时出现晃动导致种子脱落。
30.在本实施例中,如图1-图8所示,收紧组件包括固定连接于壳体2顶部内壁的吊轨12和设置于吊轨12底部的两个电动滑块,电动滑块底部设置有支架16,支架16与夹臂8固定相连;吊轨12顶部设置有卷收盒14,卷收盒14内部设置有蓄电池和卷收电机,且外壁设置有动力轴,动力轴一端设置有卷收轮13;支架16一侧设置有定滑轮15,环节头一侧设置有栓头,夹臂8顶部设置有穿线孔,栓头、定滑轮15和卷收轮13外壁均设置有绳索;两个夹臂8之间设置有活动盒11,活动盒11两侧内壁均设置有支撑缸,支撑缸的外侧设置有活塞板25,活塞板25滑动连接于夹臂8一侧内壁;活动盒11底部设置有栅栏板26,栅栏板26底部活动连接于转框19外壁,栅栏板26两侧设置有栅格槽。通过设置收紧组件,吊轨12外壁的电动滑块能够带动单臂8运动,进而收拢种子夹取范围,同时卷收盒14启动,带动卷收轮13转动,利用定滑轮15托举绳索,带动环节头和转框19上升,同时活动盒11依靠栅栏板26始终贴合于转框19外侧,从而在夹取种子上方提供一定限位和封闭,栅格槽能够方便杂质飞出。
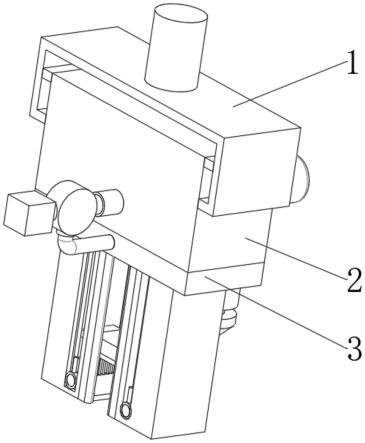
31.在本实施例中,如图1、图2、图3和图9所示,壳体2底部固定连接有壳板3,壳体2一侧设置有联通管,联通管一端设置有阀体9;阀体9一端出口设置有导流管,导流管与壳板3联通,阀体9进口端连接有风机10;壳体2另一侧设置有支管4,支管4一端设置有滤过阀5,支管4底部设置有存料筒6,存料筒6底端设置有出料阀7;壳体2上方设置有吊架1,吊架1顶部设置有吊柱27,吊架1两侧设置有称重板28,称重板28顶部设置有弹簧杆29,弹簧杆29一端设置有搭板30,搭板30与壳体2固定相连。通过设置风机10,其中阀体9与导流管联通时,吹
出气流进入壳板3区域,对种子进行吹拂除杂,且栅栏板26对种子进行挤压限位,方便杂质分离,同时避免种子飞出,然后种子继续被抬升,阀体9联通壳体2,风机10吹送种子进入支管4当中,此时滤过阀5联通外部大气,实现降压排气,然后种子进入存料筒6中,种子收取完毕之后,风机10停止,称重板28内部的称重传感器检测弹簧杆29受力竖直,判断种子质量是否达到标准,装置转运到位之后,出料阀7打开,释放种子。
32.在本实施例中,如图1-图9所示,本实施例提供的甜瓜取种器工作过程如下:
33.步骤1:回转电机20启动,带动转框19底面与地面平行,然后其相对斜面能够推动种子抬升聚拢;
34.步骤2:索带动环节头运动,通过拉动芯轴21带动转框19上移,使得种子堆进入分离区域;
35.步骤3:利用压缩杆24复位特性,带动挡板18相对贴合,使得种子抬升区域的封闭性。
36.综上,在本实施例中,按照本实施例的甜瓜取种器,通过设置收紧组件和单臂组件,其中收紧组件带动单臂组件相对运动,从而收紧单臂组件的距离,收拢甜瓜种子,然后利用单臂组件构建的闭合空间,将收拢种子逐步抬升至高处,并通过收紧组件将种子进行暂存,实现种子的保存,方便后续进行转移和释放,同时单臂组件底端依靠自身结构能够转动,在推动种子靠拢的同时,避免种子留存于装置死角中,同时避免现有技术中,依靠负压气流抽取种子,容易吸取外部空气杂质,从而导致称重不准确的问题;回转电机20启动,带动转框19底面与地面平行,然后其相对斜面能够推动种子抬升聚拢,然后绳索带动环节头运动,通过拉动芯轴21带动转框19上移,使得种子堆进入分离区域,进一步的,在夹臂8靠近时,利用压缩杆24复位特性,带动挡板18相对贴合,使得种子抬升区域的封闭性,避免种子从转框19两侧滑落,同时阶梯槽能够对芯轴21和环节头进行限位,避免转框19上移时出现晃动导致种子脱落;
37.通过设置收紧组件,吊轨12外壁的电动滑块能够带动单臂8运动,进而收拢种子夹取范围,同时卷收盒14启动,带动卷收轮13转动,利用定滑轮15托举绳索,带动环节头和转框19上升,同时活动盒11依靠栅栏板26始终贴合于转框19外侧,从而在夹取种子上方提供一定限位和封闭,栅格槽能够方便杂质飞出;
38.通过设置风机10,其中阀体9与导流管联通时,吹出气流进入壳板3区域,对种子进行吹拂除杂,且栅栏板26对种子进行挤压限位,方便杂质分离,同时避免种子飞出,然后种子继续被抬升,阀体9联通壳体2,风机10吹送种子进入支管4当中,此时滤过阀5联通外部大气,实现降压排气,然后种子进入存料筒6中,种子收取完毕之后,风机10停止,称重板28内部的称重传感器检测弹簧杆29受力竖直,判断种子质量是否达到标准,装置转运到位之后,出料阀7打开,释放种子。
39.以上,仅为本发明进一步的实施例,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明所公开的范围内,根据本发明的技术方案及其构思加以等同替换或改变,都属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
