用于估计无线通信网络中信号遮蔽障碍物和信号反射器的位置的系统和方法
1.本技术要求于2019年11月26日递交的申请号为16/695,909、发明名称为“用于估计无线通信网络中信号遮蔽障碍物和信号反射器的位置的系统和方法(systems and methods for estimating locations of signal shadowing obstructions and signal reflectors in a wireless communications network)”的美国专利申请的优先权,其全部内容通过引用结合在本技术中。
技术领域
2.本发明大体上涉及无线通信,并且在特定实施例中,涉及用于估计无线通信网络中信号遮蔽障碍物和信号反射器的位置的系统和方法。
背景技术:
3.在蜂窝网络等无线通信网络中,诸如建筑物和自然地理特征之类的障碍物可以反射、散射或遮蔽网络中发送器和接收器之间的信号传播。这些障碍物可以视为被动的,因为信号既不源自于这些障碍物,也不终止于这些障碍物。在实现波束成形以引导波束并配置传输参数的当今蜂窝网络中,缺乏障碍物的位置和范围信息使得波束成形成为一个基本上盲目的过程,仅在传输较弱或完全传输失败时才能做出反应。
4.目前,传输波束成形以模拟波束控制过程的形式实现,在该过程中,通过调整发射天线处的天线相位来控制固定波束宽度的波束穿过环境。波束控制本质上是一个分时过程:发送器在每个角度分段停留一段时间,以便在移动到下一分段之前向该分段内的用户设备(user equipment,ue)进行传输。当波束被遮蔽时,接收信号的信噪比(signal-to-noise ratio,snr)通常显著下降,导致误码率(bit error rate,ber)增加。在ber增加之后,发送器可以通过增加传输功率进行补偿,但这仅可在事后解决问题。结果,可能会发生数据包丢包或延迟;对于此问题,当前的补救措施是对网络施加反馈开销,进而引起传输功率反应式地增加。
5.蜂窝网络通常在有很多障碍物的区域中运行,障碍物导致形成高度多径的传输环境。障碍物不仅反射发送器和接收器之间的传播信号,而且还可能削弱或完全阻断信号。障碍物引起的rf信号衰减可能大于信号传播距离引起的路径损耗效应。
6.为了提高频谱效率并更好地控制传输环境中的干扰模式,已经减小蜂窝网络中的小区大小。此外,对于高度移动的ue,需要更频繁地切换基站之间的通信,以确保ue连接不被中断。通常在远离发送器的网络设备中管理此切换过程,这会导致额外的网络延迟和负担,因为ue应该仍然不知道分离/重新附接过程。
7.尽管遮蔽和反射都是电磁波与原子和分子相互作用引起的,但这两者是两种独立的传播现象,这两种现象降低了无线通信系统中的通信质量。遮蔽对通信的影响在于,由于各种大小的障碍物导致通信链路衰减,引起间歇性功率预算损耗。反射对通信的影响在于,在发送器和接收器之间的多个路径上传播的信号之间造成多径干扰。
8.可以通过采用卫星图像、视频图像扫描、红外成像、radar、lidar等传感技术来确定一些遮蔽和反射障碍物的位置。然而,这些技术的实现成本昂贵,并且不可扩展。另外,简单地确定障碍物的物理位置可能无法提供以蜂窝无线频率通信所必需的信息。障碍物根据其构成成分(例如,混凝土建筑物与木建筑物中的钢筋用量)而存在显著差异。仅根据上述传感技术中使用的光波、超声波、太赫兹波等确定的障碍物的物理位置,可能难以确定障碍物对微波和毫米波通信的信号传输的影响。
技术实现要素:
9.根据所公开的一个方面,提供了一种用于估计无线通信网络中信号遮蔽障碍物的位置的方法。所述方法包括:网络设备从用户设备(user equipment,ue)接收相邻ue的标识,其中,所述ue已通过非视距(non-line-of-sight,nlos)侧行链路传输从相邻ue接收参考信号。所述方法还包括:根据与所述nlos侧行链路传输关联的ue的位置信息,估计信号遮蔽障碍物的位置;根据至少一个信号遮蔽障碍物的估计位置,配置所述网络设备与至少一个ue之间的通信。
10.所述方法可以包括:从ue接收指示,所述指示表明已通过nlos传播路径接收所述网络设备向所述ue传输的参考信号;估计信号遮蔽障碍物的位置可以包括:根据所述网络设备的位置和所述ue的位置信息,估计信号遮蔽障碍物的位置。
11.所述方法可以包括:确定已通过nlos传播路径接收所述ue向所述网络设备传输的参考信号;估计信号遮蔽障碍物的位置可以包括:根据所述网络设备的位置和所述ue的位置信息,估计信号遮蔽障碍物的位置。
12.配置所述网络设备与所述至少一个ue之间的通信可以包括:根据所述至少一个信号遮蔽障碍物的所述估计位置,增加用于传输的传输功率。
13.配置所述网络设备与所述至少一个ue之间的通信可以包括:为所述至少一个信号遮蔽障碍物影响的传输选择稳健的调制和编码方案(modulation and coding scheme,mcs)。
14.配置所述网络设备与所述至少一个ue之间的通信可以包括:选择性地避免将传输波束指向信号遮蔽障碍物的方向。
15.配置所述网络设备与所述至少一个ue之间的通信可以包括:向设置为与所述至少一个ue通信的基站提供所述至少一个信号遮蔽障碍物的估计位置,所述基站可用于配置与所述至少一个ue的通信。
16.配置通信可以包括:对于被信号遮蔽障碍物遮蔽的ue,使所述被遮蔽的ue从所述基站切换到另一个基站。
17.配置通信可以包括:使所述基站配置向未被所述信号遮蔽障碍物遮蔽的另一个ue进行的传输,以便使用另一个基站的大致相同的非正交频谱来向所述被遮蔽的ue进行传输。
18.所述方法还可以包括:通过为所述网络设备和所述ue中的至少一部分之间的上行链路或下行链路传输生成距离估计,为标识的ue中的至少一部分生成位置信息。
19.所述方法可以包括:通过为ue对之间的视距(line-of-sight,los)侧行链路传输接收距离估计,为所述标识的ue中的至少一部分生成位置信息。
20.所述方法可以包括:通过接收标识所述ue中的至少一部分的位置的全球定位系统(global positioning system,gps)信息,为所述标识的ue中的至少一部分生成位置信息。
21.所述方法可以包括:通过使用与所述网络设备或所述ue关联的已知位置信息,为所述标识的ue中的至少一部分生成位置信息。
22.估计信号遮蔽障碍物的位置可以包括:将与nlos侧行链路传输关联的遮蔽因素居中置于与所述nlos侧行链路传输关联的所述ue的相应位置的中间;将所述遮蔽因素定向在所述ue的相应位置之间延伸的方向上;根据所述传输的估计路径损耗,估计所述遮蔽因素的范围;针对nlos侧行链路传输,组合遮蔽因素以生成表示信号遮蔽障碍物的空间位置的遮蔽地图。
23.所述方法可以包括:响应于接收相邻ue的标识,更新所述遮蔽地图;向最近接收的相邻ue的标识分配比之前接收的相邻ue的标识更大的权重。
24.组合遮蔽因素可以包括:使用核密度估计组合遮蔽因素,以生成遮蔽位置的概率密度函数。
25.组合遮蔽因素可以包括:使用高斯核和断壁核中的一项组合遮蔽因素。
26.所述方法还包括:响应于从基站接收所述基站与通过所述基站和所述网络通信的ue之间的传输失败的通知,发起对所述遮蔽地图的更新。
27.接收相邻ue的所述标识可以包括:接收在所述ue从所述相邻ue接收的所述参考信号中包含的匿名标识符。
28.与标识的nlos侧行链路传输关联的所述ue中的至少一个可以具有随时间变化的位置,并且估计信号遮蔽障碍物的位置可以包括:根据所述至少一个ue的连续位置信息,估计信号遮蔽障碍物的位置。
29.根据所公开的另一个方面,提供了一种用于无线通信网络的网络设备,所述网络设备包括:基站,包括发送器和接收器;处理器,与所述基站通信;处理器可读存储器,与所述处理器通信并存储处理器可执行指令。在所述处理器执行所述处理器可执行指令时,使所述处理器执行一种方法。所述方法包括:所述基站的所述接收器从用户设备(user equipment,ue)接收相邻ue的标识,其中,所述ue已通过非视距(non-line-of-sight,nlos)侧行链路传输从相邻ue接收参考信号;使所述处理器根据与所述nlos侧行链路传输关联的ue的位置信息,估计信号遮蔽障碍物的位置;根据至少一个信号遮蔽障碍物的估计位置,配置所述基站与至少一个ue之间的通信。
30.根据所公开的另一个方面,提供了一种用于估计无线通信网络中信号反射器的位置的方法。所述方法包括:网络设备从与所述网络通信的用户设备(user equipment,ue)接收侧行链路传输信息;所述侧行链路传输信息包括:距离估计,指示与通过所述侧行链路传输在间接传播路径上从相邻ue接收的参考信号关联的距离;与每个接收的参考信号关联的接收功率;所述相邻ue的标识。所述方法还包括:根据与所述侧行链路传输关联的ue的位置信息、所述接收的距离估计以及所述接收功率,估计信号反射器的位置。所述方法还包括:根据至少一个信号反射器的估计位置,配置所述网络设备与至少一个ue之间的通信。
31.所述方法可以包括:从ue接收在所述ue处通过间接传播路径从所述基站接收的参考信号的距离估计、每个接收的参考信号的接收功率;估计信号反射器的位置还可以包括:根据所述ue的位置信息、所述基站的位置、所述接收的距离估计和所述接收功率,估计信号
反射器的位置。
32.所述方法可以包括:在所述基站处接收ue传输的参考信号,并为在基站处通过间接传播路径从所述ue接收的参考信号生成距离估计、通过间接传播路径接收的每个参考信号的接收功率;估计信号反射器的位置还可以包括:根据所述基站的位置、所述ue的位置信息、所述接收的距离估计和所述接收功率,估计信号反射器的位置。
33.使所述基站配置传输可以包括以下各项中的至少一项:将传输波束指向信号反射器,使所述信号反射器将所述波束重定向至对传输信号的接收较弱的ue;响应于确定一个或多个ue位于受到指向接收ue的传输波束干扰的区域,将所述波束指向信号反射器,以使所述信号反射器将所述波束重定向至所述接收ue;响应于确定通过强视距(line-of-sight,los)传输波束向ue执行的传输正在使能够在所述传输波束中进行空间复用的数据流数量减少,将至少一个其它传输波束指向信号反射器,以使所述信号反射器将所述至少一个其它传输波束重定向至所述接收ue;在所述直接波束和所述至少一个其它传输波束中复用所述传输。
34.所述方法可以包括通过以下各项中的一项或多项为所述标识的ue中的至少一部分生成位置信息:为所述网络设备和所述ue中的至少一部分之间的上行链路或下行链路传输生成距离估计;为ue之间的视距(line-of-sight,los)侧行链路传输接收距离估计;接收标识所述ue中的至少一部分的位置的全球定位系统(global positioning system,gps)信息;使用与所述基站或所述ue关联的已知位置信息。
35.确定信号反射器的位置可以包括:生成连接图,所述连接图具有与所述网络中网络设备对应的节点以及与位置信息可用的ue对应的节点;对于所述连接图中的每个间接参考信号传输,建立表示所述反射器的可能位置的轨迹;组合所述连接图中的所述间接参考信号传输的所述轨迹,以生成表示所述无线通信网络中反射障碍物的位置的反射器地图。
36.所述方法可以包括:响应于接收侧行链路传输信息,更新所述反射器地图;向最近接收的侧行链路传输信息分配比之前接收的侧行链路传输信息更大的权重。
37.组合所述轨迹可以包括:使用核密度估计来生成反射器位置的概率密度函数。
38.所述方法可以包括:响应于从所述网络设备接收所述网络设备和所述ue之间的传输失败的通知,发起对所述反射器地图的更新。
39.所述ue中的至少一个可以具有随时间变化的位置,并且估计信号反射器的位置可以包括:根据连续接收的与所述侧行链路传输关联的所述ue的侧行链路传输信息,估计信号反射器的位置。
40.所述方法可以包括:从所述反射器地图中选择最重要的反射器位置,用于所述基站与所述连接图中的ue节点之间的传输;使用所述基站和所述ue的位置作为神经网络的输入,并训练所述神经网络,以输出最重要的反射器位置;使用所述训练的神经网络,为所述网络中所述基站和所述ue中的一个之间的间接传输生成波束方向。
41.根据所公开的另一个方面,提供了一种用于无线通信网络的网络设备,所述网络设备包括:基站,包括发送器和接收器;处理器,与所述基站通信;处理器可读存储器,与所述处理器通信并存储处理器可执行指令。在所述处理器执行所述处理器可执行指令时,使所述处理器执行一种方法。所述方法包括:在所述基站的所述接收器处,从与所述网络通信的用户设备(user equipment,ue)接收侧行链路传输信息;所述侧行链路传输信息包括:距
离估计,指示与通过所述侧行链路传输在间接传播路径上从相邻ue接收的参考信号关联的距离;与每个接收的参考信号关联的接收功率;所述相邻ue的标识。所述方法还包括:使所述处理器根据与所述侧行链路传输关联的ue的位置信息、所述接收的距离估计以及所述接收功率,估计信号反射器的位置。所述方法还包括:根据至少一个信号反射器的估计位置,配置所述基站与至少一个ue之间的通信。
42.阅读以下具体实施例说明并结合附图,对于本领域的普通技术人员来说,本发明实施例的其它方面和特征将是显而易见的。
附图说明
43.现在参考附图描述本发明的实施例,其中:
44.图1a示出了一个公开实施例提供的示例性通信系统的框图;
45.图1b示出了一个公开实施例提供的电子设备示例的框图;
46.图1c示出了一个公开实施例提供的基站示例的框图;
47.图2示出了一个公开实施例提供的无线通信网络的一部分的物理布局示意图;
48.图3a示出了用于指示网络设备执行估计图2所示无线通信网络内信号遮蔽障碍物位置的过程的代码块流程图;
49.图3b示出了用于指示ue或基站执行nlos传输确定的代码块流程图;
50.图4a示出了基站配置的第一个示例,用于选择性地避免将传输波束指向信号遮蔽障碍物的方向;
51.图4b示出了基站配置的第二个示例,用于选择性地避免将传输波束指向信号遮蔽障碍物的方向;
52.图5示出了用于生成遮蔽地图的系统组件的框图;
53.图6示出了对用于生成遮蔽地图的一组模拟结果的图形描述;
54.图7示出了用于生成图6所示遮蔽地图的节点间信令的信号流程图;
55.图8示出了另一个公开实施例提供的无线通信网络的一部分的物理布局示意图;
56.图9a示出了用于指示网络设备执行在网络设备中实现的估计图8所示无线通信网络内信号反射器的位置的过程的代码块流程图;
57.图9b示出了用于指示ue或基站确定nlos距离估计的代码块流程图;
58.图10a示出了用于主动将传输波束指向已知信号反射器的基站配置的第一个示例;
59.图10b示出了可能在ue处引起干扰的基站配置的示例;
60.图10c示出了用于通过将传输波束指向已知信号反射器来主动避免ue间干扰的基站配置的示例;
61.图10d示出了在直接波束和其它波束上复用传输以改进所述传输的mimo矩阵秩的基站配置的示例;
62.图11示出了用于生成反射器地图的系统的框图;
63.图12示出了对两个不同节点处的两个功率延迟分布的图形描述;
64.图13示出了对用于生成反射器地图的一组模拟结果的图形描述;
65.图14示出了用于生成反射器地图的节点间信令的信号流程图;
66.图15示出了组成网络中的网络设备的模块之间的信息流管道框图;
67.图16示出了用于实现图15所示波束预测生成器的神经网络配置示意图;
68.图17示出了无线通信网络和nlos场景的示意图;
69.图18示出了另一个示例性无线通信网络的示意图;
70.图19(a)至图19(d)示出了连接环路的示例的示意图;
71.图20示出了bs与两个ue之间的距离和角度估计的示意图;
72.图21a示出了可以在连接图中找到的一类三角形连接路径的示意图;
73.图21b示出了可以在连接图中找到的另一类三角形连接路径的示意图;
74.图22示出了具有移动ue的另一个示例性无线通信网络的示意图以及连接图的简化视图;
75.图23示出了一个实施例提供的示例性神经网络的示意图;
76.图24示出了另一个示例性通信网络的框图以及协作ue定位的确定;
77.图25示出了一个实施例提供的信令的信号流程图;
78.图26示出了在一个实施例中由ue执行的方法示例的流程图;
79.图27示出了在一个实施例中由网络设备执行的方法示例的流程图。
具体实施方式
80.图1a示出了可以在其中实现本发明实施例的示例性通信系统100。一般而言,系统100使得多个无线元件或多个有线元件能够传输数据和其它内容。系统100的目的可以是通过广播、窄播、用户设备到用户设备等提供内容(语音、数据、视频、文本)。系统100可以通过共享带宽等资源进行高效操作。
81.在本示例中,所述通信系统100包括:无线通信网络102,包括电子设备(electronic device,ed)110至114;无线接入网(radio access network,ran)120和122。所述系统100还包括核心网130、公共交换电话网(public switched telephone network,pstn)132、互联网134以及其它网络136。尽管图1a至图1c示出了特定数量的此类组件或元件,但是所述系统100可以包括任意合理数量的此类组件或元件。
82.所述ed 110至114用于在所述系统100中运行和/或通信。例如,所述ed 110至114用于通过无线通信信道传输和/接收信号。例如,所述ed 110至114表示任何适合无线操作的终端用户设备,并且可以包括如下设备(或可以称为):用户设备(user equipment,ue/user device)、无线发射/接收单元(wireless transmit/receive unit,wtru)、移动站、移动用户单元、蜂窝电话、站点(station,sta)、机器类通信(machine type communication,mtc)设备、个人数字助理(personal digital assistant,pda)、智能手机、笔记本电脑、计算机、触摸板、无线传感器或消费型电子设备。
83.在图1a中,所述ran 120和122分别包括基站140和142。每个基站140和142用于与所述ed 110至114中的一个或多个以无线方式连接,以便能够访问任何其它基站、所述核心网130、所述pstn 132、所述互联网134和/或其它网络136。例如,所述基站140-142可以包括(或是)若干熟知的设备中的一个或多个,如基站收发信台(base transceiver station,bts)、node-b(nodeb)、演进型nodeb(evolved nodeb,enodeb)、家庭enodeb、gnodeb(有时也称为“千兆”nodeb)、传输点(transmission point,tp)、收发点(transmit/receive point,
trp)、站点控制器、接入点(access point,ap)或无线路由器。任意ed 110至114可替代地或联合地用于与任何其它基站接口140-142、所述互联网134、所述核心网130、所述pstn132、所述其它网络136或前述设备的任何组合进行连接、访问或通信。可选地,所述系统可以包括ran,例如ran 120;其中,相应的所述基站140通过所述互联网134访问所述核心网130。
84.所述ed 110至114以及所述基站140-142是可用于实现本文描述的部分或全部功能和/或实施例的通信设备的示例。在图1a所示的实施例中,所述基站140构成所述ran 120的一部分,所述ran 120可以包括其它基站、基站控制器(base station controller,bsc)、无线网络控制器(radio network controller,rnc)、中继节点、元件和/或设备。任何基站140或142都可以是分布在相应ran或其它设备中的单个元件(如图所示)或多个元件。此外,所述基站140构成所述ran 120的一部分,所述ran 120可以包括其它基站、元件和/或设备。每个基站140-142分别可以用于在特定地理范围或区域内运行以传输和/或接收无线信号,所述地理范围或区域有时也称为“覆盖区域”。小区可以进一步划分为小区扇区,例如,基站140-142可以使用多个收发器来向多个扇区提供服务。在一些实施例中,基站140-142可以实现为无线接入技术支持的微微节点或毫微微节点。在一些实施例中,可以使用多输入多输出(multiple-input multiple-output,mimo)技术为每个覆盖区域部署多个收发器。图1a所示的ran 120和122的数量仅是示例性的。设计所述系统100时可以考虑任何数量的ran。
85.所述基站140-142使用无线通信链路(例如,rf、μwave、ir等)通过一个或多个空口150和152与所述ed 110至114中的一个或多个进行通信。所述空口150和152可以利用任何合适的无线接入技术。例如,所述系统100可以在所述空口150和152中实现一种或多种信道接入方法,例如码分多址(code division multiple access,cdma)、时分多址(time division multiple access,tdma)、频分多址(frequency division multiple access,fdma)、正交fdma(orthogonal fdma,ofdma)或单载波fdma(single-carrier fdma,sc-fdma)。在一些实施例中,所述ed 110至114包括能够通过侧行链路154和156彼此直接通信的ed。
86.基站140-142可以实现通用移动通讯系统(universal mobile telecommunication system,umts)陆地无线接入(terrestrial radio access,utra)以使用宽带cdma(wideband cdma,wcdma)建立空口150。这样,所述基站140-142可以实现hspa、hspa 等协议,可选地,包括hsdpa和/或hsupa。或者,基站140-142可以使用lte、lte-a和/或lte-b建立具有演进型utms陆地无线接入(evolved utms terrestrial radio access,e-utra)的空口150。预计所述系统100可以使用多信道接入功能,包括如上所述的方案。其它用于实现空口的无线技术包括ieee 802.11、802.15、802.16、cdma2000、cdma2000 1x、cdma2000 ev-do、is-2000、is-95、is-856、gsm、edge和geran。当然,可以使用其它多址接入方案和无线协议。
87.所述ran 120和122与所述核心网130进行通信,以向所述ed 110至114提供各种服务,如语音、数据和其它服务。可以理解的是,所述ran 120和122和/或所述核心网130可以与一个或多个其它ran(未示出)进行直接或间接通信,所述ran可以或不可以由所述核心网130直接提供服务,并且可以使用或不使用与ran 120和/或ran 122相同的无线接入技术。所述核心网130也可以充当以下两者之间的网关接入:(i)所述ran 120和122和/或ed 110
至114,(ii)其它网络(例如所述pstn 132、所述互联网134和所述其它网络136)。此外,部分或全部所述ed 110至114可以包括使用不同无线技术和/或协议通过不同无线链路与不同无线网络通信的功能。pstn 132可以包括用于提供传统电话业务(plain old telephone service,pots)的电路交换电话网络。互联网134可以包括计算机网络和/或子网(内网),并包含ip、tcp和udp等协议。ed 110至114可以是能够根据多种无线接入技术运行的多模式设备,并且包含支持此类技术所必须的多个收发器。
88.所述ran(120、122)、所述基站(140、142)和所述核心网130可以统称为“网络设备”。所述网络设备元件可以在物理上分布在覆盖区域内。所述核心网130通常包括在以下设备间连接的计算机处理器硬件:所述pstn 132、互联网134和其它网络136以及所述ran(120、122),以向所述ed 110至114提供服务。
89.图1b和图1c示出了可用于实现图1a所示的网络102的示例性设备。具体地,图1b示出了ed 160的示例,图1c示出了示例性基站180。这些组件可以用于通信系统100或任何其它合适的系统中。
90.如图1b所示,所述ed 160包括至少一个处理单元162。所述处理单元162实现所述ed160的各种处理操作。例如,所述处理单元162可以执行信号编码、数据处理、功率控制、输入/输出处理或任何其它使所述ed 160能够在所述通信系统100中运行的功能。处理单元162还可以用于实现本文其它地方详述的部分或全部功能和/或实施例。每个处理单元162包括任何合适的用于执行一个或多个操作的处理设备或计算设备。每个处理单元162可以包括微处理器、微控制器、数字信号处理器、现场可编程门阵列或专用集成电路,等等。
91.所述ed 160还包括至少一个收发器164。所述收发器164用于调制数据或其它内容,以便通过至少一根天线或网络接口控制器(network interface controller,nic)166进行传输。所述收发器164还用于解调所述至少一根天线166接收的数据或其它内容。每个收发器164包括用于为无线或有线传输生成信号和/或用于处理通过无线或有线方式在所述天线166处接收的信号的任何合适的结构。每根天线166包括用于传输和/或接收无线或有线信号172的任何合适的结构。所述ed 160中可以使用一个或多个收发器164。所述ed 160中可以使用一根或多根天线166。尽管收发器164以单个功能单元示出,但还可以使用至少一个发送器和至少一个单独的接收器来实现。
92.所述ed 160还包括一个或多个输入/输出设备168或接口(例如连接图1a所示互联网134的有线接口)。一个或多个输入/输出设备168可以与网络中的用户或其它设备进行交互。每个输入/输出设备168包括用于向用户提供信息或从用户接收信息的任何合适的结构,例如,扬声器、麦克风、小键盘、键盘、显示器或触摸屏,包括网络接口通信。
93.此外,所述ed 160包括至少一个存储器170。所述存储器170存储所述ed 160使用、生成或收集的指令和数据。例如,存储器170可以存储用于实现本文描述的部分或全部功能和/或实施例并由一个或多个处理单元162执行的软件指令或模块。每个存储器170包括任何合适的一个或多个易失性和/或非易失性存储与一个或多个检索设备。可以使用任何合适类型的存储器,例如,随机存取存储器(random access memory,ram)、只读存储器(read only memory,rom)、硬盘、光盘、用户识别模块(subscriber identity module,sim)卡、记忆棒、安全数码(secure digital,sd)存储卡。
94.如图1c所示,所述基站180包括至少一个处理单元182、至少一个发送器184、至少
一个接收器186、一根或多根天线188、至少一个存储器190以及一个或多个输入/输出设备或接口192。可以使用收发器(未示出)来代替所述发送器184和所述接收器186。调度器194可以耦合到所述处理单元182。所述调度器194可以包括在所述基站180内,也可以与所述基站180分开操作。处理单元182实现基站180的各种处理操作,例如,信号编码、数据处理、功率控制、输入/输出处理或任何其它功能。处理单元182还可以用于实现本文详述的部分或全部功能和/或实施例。每个处理单元182包括任何合适的用于执行一个或多个操作的处理设备或计算设备。每个处理单元182可以包括微处理器、微控制器、数字信号处理器、现场可编程门阵列或专用集成电路,等等。
95.每个发送器184包括任何合适的用于生成与一个或多个ed或其它设备进行无线或有线传输的信号的结构。每个接收器186包括任何合适的用于处理从一个或多个ed或其它设备通过无线或有线方式接收的信号的结构。虽然示为单独的组件,但是至少一个发送器184和至少一个接收器186可以组合成收发器。每根天线188包括用于传输和/或接收无线或有线信号172的任何合适的结构。尽管此处将公共天线188示为同时耦合至所述发送器184和所述接收器186,但是一根或多根天线188可以耦合至所述发送器184,且一根或多根单独的天线188可以耦合至所述接收器186。每个存储器190包括任何合适的易失性和/或非易失性存储和检索设备,例如上文结合图1b中的ed160所述的那些存储和检索设备。所述存储器190存储所述基站180使用、生成或收集的指令和数据。例如,存储器190可以存储用于实现本文描述的部分或全部功能和/或实施例并由一个或多个处理单元182执行的软件指令或模块。
96.每个输入/输出设备192可以与网络中的用户或其它设备进行交互。每个输入/输出设备192包括用于向用户提供信息或从用户接收/提供信息的任何合适的结构,包括网络接口通信。
97.应当理解的是,根据图1a至图1c,本文提供的所述实施例方法的一个或多个步骤可以由相应的单元或模块执行。例如,信号可以由发送单元或发送模块进行发送。信号可以由接收单元或接收模块进行接收。信号可以由处理单元或处理模块进行处理。其它步骤可以由机器学习(machine learning,ml)模块执行。相应的单元/模块可以使用硬件、执行软件的一个或多个组件或设备或其组合来实现。例如,一个或多个单元/模块可以是集成电路,例如,现场可编程门阵列(field programmable gate array,fpga)或专用集成电路(application-specific integrated circuit,asic)。应当理解的是,如果上述模块使用供处理器等执行的软件实现,则这些模块可以由处理器根据需要全部或部分检索,单独或集体检索用于处理,根据需要在一个或多个实例中检索,并且这些模块本身可以包括用于进一步部署和实例化的指令。所述ed160等所述ed和180等所述基站的其它细节是本领域技术人员已知的。因此,为了清楚起见,这里省略了这些详细内容。
98.图2中的200处示出了遮蔽地图生成实施例提供的无线通信网络的一部分的物理布局示意图。参考图2,所述无线通信网络200包括通常如上所述配置为与所述基站140和142连接的基站202、204、206和208。ue 210、212、214和216与所述基站202至208中的一个或多个进行无线通信。在图2中,所述ue 210、212、214和216示为蜂窝手机设备,但可以是图1a所示ed 110至114及上述ed中的任何一种。
99.视距(line-of-sight,los)传播路径220与所述基站204和所述ue 210之间的传输
关联。另一个los传播路径222存在于所述基站204和所述ue 212之间,并且los传播路径224存在于所述基站206和所述ue 212之间。此外,los侧行链路传播路径226还存在于所述ue 212和所述ue 210之间。侧行链路连接、传输或通信链路与不通过所述基站202至208中的一个路由的两个ue之间的直接传输关联。
100.建筑物240位于所述基站208和所述ue 214之间,因此所得到的传播路径228是非视距(non-line-of-sight,nlos)路径。所述建筑物240作为信号遮蔽障碍物,削弱穿过所述建筑物传播的信号。另一遮蔽障碍物242位于所述基站204和所述ue 210之间,使得该基站和所述ue之间存在nlos传播路径230。侧行链路传播路径232穿过位于所述ue 212和所述ue214之间的遮蔽障碍物244。所述ue 216与所述ue 210具有nlos侧行链路连接234,与所述基站204具有los连接236。尽管图2中仅示出了若干ue,但网络环境在区域内通常具有更多ue,并且实际上网络会具有比图2所示更多的侧行链路、上行链路和下行链路连接。
101.所述障碍物240、242和244使发送器和接收器之间的直接传播路径的接收信号功率衰减和/或波动。在所示实施例中,所述障碍物238、240和242以建筑物的形式表示,但是在其它实施例中障碍物可以是山坡等自然特征。尽管所述建筑物238和240在地理坐标系250内具有固定位置;在其它实施例中,信号遮蔽障碍物可以是移动的,例如大型卡车或火车。
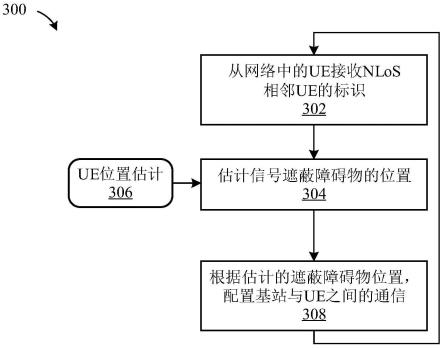
102.参考图3a,在用于估计无线通信网络200内信号遮蔽障碍物位置的网络设备中实现的过程大体如300处所示。这些框大体表示计算机指令或代码,可以执行所述计算机指令或代码,以使构成所述网络设备的各种计算机处理器单元执行用于估计信号遮蔽障碍物的位置的功能。
103.框302指示所述无线通信网络200的所述网络设备从所述网络中的ue接收相邻ue的标识,其中,所述ue通过非视距(non-line-of-sight,nlos)侧行链路传输从相邻ue接收参考信号。所述参考信号可以类似于通常在基站和ue之间传输的参考信号,这有助于计算ue距离、信道系数等。在本实施例中,相邻ue传输的所述参考信号包括传输所述信号的所述ue的标识,例如国际移动用户识别码(international mobile subscriber identity,imsi)或与所述ue关联的其它唯一标识符。可以出于安全原因对所述ue标识符进行匿名化,以防止接收ue能够确定相邻ue的标识符。在一个实施例中,可以使用数据模糊处理来对所述标识符进行匿名化。
104.因此,再次参考图2,对于所述无线通信网络200,所述基站204可以从所述ue 216接收信令,所述信令标识所述ue 210与所述ue216具有所述nlos侧行链路234。类似地,所述基站204和206可以各自从所述ue 212接收标识所述ue214与所述ue 212具有nlos侧行链路连接232的相应信令。对于ue密集网络,ue之间存在大量潜在的nlos侧行链路连接,将至少一部分所述nlos侧行链路连接传送到所述基站202至208中的一个或多个。
105.然后,所述过程300的框304指示所述网络设备估计信号遮蔽障碍物的位置。所述信号遮蔽障碍物的位置基于对于在框302中标识具有nlos侧行链路连接的所述ue对的ue位置估计306。在无线通信网络中,针对与所述网络通信的ue,在网络设备数据库中生成并维护ue位置估计306。可以根据各种不同的数据集来生成所述ue位置估计,包括所述基站和ue之间的上行链路或下行链路传输、从所述ue中的一部分接收全球定位系统(global positioning system,gps)信息,和/或使用其它已知的位置信息。对于具有固定位置的基
站或ue,可以建立准确的地面真值位置,用作所述无线通信网络200中的锚点位置。
106.再次参考图2,所述ue 216和210之间的所述nlos连接234指示信号遮蔽障碍物,例如位于所述标识的ue对之间的所述建筑物240。因此,所述nlos侧行链路连接234的标识便于根据所述ue对的相应位置推断所述障碍物242的位置。如果所述无线通信网络200的所述网络设备具有所述ue 210和所述ue216的位置估计,则所述网络设备可以推断所述两个ue之间存在障碍物。
107.然后,框308指示所述网络设备使所述基站202至206根据所述信号遮蔽障碍物的所述估计位置来配置与ue的通信。在一个实施例中,可重复执行框302、304和308,以根据所述无线通信网络200内的多个相邻ue对之间的所述nlos侧行链路连接,来确定信号遮蔽障碍物因素的位置。可以组合这些标识的信号遮蔽因素,以生成遮蔽地图,所述遮蔽地图表示所述地理坐标系250内的信号遮蔽障碍物的空间位置。可以将所述遮蔽地图提供给所述基站202至206,以便主动配置通信参数,从而降低传输失败的频率。
108.例如,在图2中,已接收所述遮蔽地图的所述基站204能够确定所述建筑物242可能遮蔽所述基站与所述ue 210之间的通信。因此,当传输波束停留在包括障碍物的角度分段中,所述基站204可以主动增加传输功率,以对信号遮蔽进行补偿。尽管传统的无线通信网络可以在信号被遮蔽时增加传输功率,但是这种增加仅在遇到传输失败之后才发生。因此,主动增加功率可能避免所述传输失败,并减少与反应式地增加传输功率关联的传输延迟。所述基站204可以附加地或替代地主动选择更稳健的调制和编码方案(modulation and coding scheme,mcs),用于向已知位于所述建筑物242后面的所述ue 210进行传输。
109.在其它实施例中,如图4a所示,基站400可以可操作地配置为选择性地避免将传输波束指向信号遮蔽障碍物402的方向。在这种情况下,ue 404可以由另一个基站(未示出)提供服务。如果已知ue在网络中的位置,则所述基站400还可以使波束驻留在已知包括ue的角度分段中,同时避免花费时间驻留在当前不包括任何ue的角度分段中。
110.在图4b所示的另一个实施例中,基站410可发起将被遮蔽的ue 412切换至信号传输不受所述信号遮蔽障碍物402影响的另一个基站414。此外,当已知信号遮蔽障碍物402应该会减少来自两个基站410和414的相应信号传输之间的干扰时,所述信号遮蔽障碍物402的位置信息有助于将另一个基站使用的相同非正交频谱重用于向被遮蔽的ue 412进行信号传输。
111.如上所述,对于ue密集网络,ue之间存在可用于确定遮蔽位置的大量潜在nlos侧行链路连接。此外,所述基站202至208通常还从所述ue 210至216接收信号,作为从所述ue到所述基站的上行链路传输的一部分。所述基站202至208在接收所述参考信号时,可以确定已通过nlos传播路径接收所述传输的参考信号。类似地,对于所述基站202至208和所述ue 210至216之间的下行链路传输,ue可以确定通过nlos传播路径接收了基站传输的参考信号。nlos下行链路和上行链路传输的标识可以有利地与相邻ue之间的nlos侧行链路传输的所述标识组合,用于生成所述遮蔽地图。包括上行链路传输和下行链路传输的一个优点是,可以准确地确定所述基站202至208的位置。在生成遮蔽位置时使用锚点位置,可以提高所得到的遮蔽地图的空间精度。
112.所述过程300的框302需要标识相邻ue 210至216之间的nlos通信,以及可选地,标识所述ue与所述基站202至208之间的nlos上行链路和下行链路通信。于2019年11月6日递
交的申请号为us 16/675597、发明名称为“无线通信网络中基于连接的定位确定(connectivity-based positioning determination in wireless communication networks)”的申请人共同所有美国专利申请中公开了一种区分los链路和nlos链路的方法,其全部内容通过引用结合在本技术中。在所述公开的方法中,通过以下方式使用基于标记生成和神经网络训练的los链路标识来配置los标识模型:(i)根据两个不同的几何差异分析生成los/nlos标签;(ii)训练神经网络以泛化到所述地理坐标系250内的未见位置。然后将所述训练的los标识模型传送到ue,所述ue用于推断其与相邻ue的侧行链路通信的所述los/nlos状态。在所述编号为us 16/675597的美国申请中,将los通信的标识传输到网络设备,可以在所述网络设备中用于更准确地估计所述网络中ue的位置。在本发明中,将nlos通信的标识传输到网络设备(即,确定不通过los传播路径的通信)。在其它实施例中,可以实现将通信标识为通过los或nlos传播路径的替代方法,以在所述ue 210至216和所述基站202至208处执行所述nlos确定。
113.参考图3b,320处大体示出了用于指示ue或基站执行在所述ue(例如图2所示的ue216)中的一个上实现的所述nlos传输确定的方法。所述ue 216之前已从所述网络设备(即通过所述基站204)接收los/nlos预测参数322。所述网络设备周期性地向ue提供所述los/nlos预测参数322,用于在所述ue 216上实现los/nlos预测模型。框324指示所述ue 216使用所述模型来推断是否已通过nlos传播路径从所述相邻ue 210接收侧行链路通信。如果确定已通过nlos传播路径接收所述侧行链路通信,则框326将所述相邻ue 210的所述匿名ue标识符传输到所述基站204。如果确定所述侧行链路通信为los通信,则不需要向所述基站204传输标识以用于确定所述遮蔽障碍物位置。然而,所述los标识可以用于生成如下所述的ue位置估计,并且仍然可以传输至所述基站204。在编号为us 16/675597的美国申请中,还根据ue对之间的视距(line-of-sight,los)侧行链路传输的接收距离估计,生成ue位置估计。如图3中的306处所示,这些ue位置估计可以用作所述ue位置估计的来源。
114.参考图5,500处大体示出了用于生成遮蔽地图的系统组件框图。所示系统500包括图2所示ue 210至216中的每一个上的los/nlos预测模块502。所述los/nlos预测模块502使用所述网络设备向ue提供的所述los/nlos预测参数322实现所述los/nlos标识模型,如下文所述。510处示出了所述网络中的所述ue和基站以及这些元件之间的通信链路,其中同时示出了los连接和nlos连接。所述信号遮蔽障碍物在510处以矩形块表示。
115.所述ue和基站可以表示为网络图中的一组节点所述节点v之间的连接如510处所示。所述los/nlos预测模块502执行图3a所示的框302至308,并生成推断对每个推断对包括:一组推断标识ue和/或uev与其具有los连接的基站v
′
;以及一组推断标识ue和/或所述ue v与其具有nlos连接的基站v
′
。在512处,所述nlos连接以虚线表示,所述los连接以实线表示。为了生成所述遮蔽地图,所述网络设备从所述ue接收包括所述推断的信令,并处理所述推断以生成以下集:
[0116][0117][0118]
[0119]
其中,表示与ue v
′
具有nlos侧行链路连接的节点v的一组标识;表示与基站v
′
具有nlos下行链路连接的节点v的一组标识;表示集和集的并集。
[0120]
在本实施例中,所述los/nlos预测模块502还为上行链路、下行链路和侧行链路连接生成los标识,并将标识这些连接的信令传输回所述网络设备。如编号为16/675597的美国申请中所详述,在本实施例中,所述网络设备包括定位系统504,所述定位系统504从los/nlos预测模块502接收所述los标识并使用这些标识来建立ue位置估计306。在其它实施例中,可以通过其它方式,在不使用los侧行链路连接信息的情况下生成所述ue位置估计。
[0121]
所述系统500的所述网络设备部分还包括遮蔽地图生成器506,用于从所述定位系统504接收所述ue位置估计306。所述遮蔽地图生成器506还接收等式1中的所述nlos标识集并将所述ue位置估计306与所述nlos标识组合。因此,将所述节点的集提供给所述定位系统504以估计节点v的位置zv,进而提供给所述遮蔽地图生成器506。不必为网络200中的所有ue节点建立位置估计。所述遮蔽地图生成器506使用这些信息生成由以下顶点构成的标记图g
″
=(v
″
,e
″
):
[0122][0123]
以及以下边缘集:
[0124][0125]
其中,v
″
为包括所有ue的顶点集,每个节点v使用其位置估计zv进行标记。所述图v
″
如图5中的514处所示,并且随着接收附加推断对并添加边缘和顶点而迭代地更新。
[0126]
为了生成所述遮蔽地图,所述遮蔽地图生成器506通过更新以下遮蔽地图函数,将应用核密度估计(kernel density estimation,kde)应用于图g
″
:
[0127][0128]
其中,是以所述图中每个(v,v
′
)链路边缘的位置为中心的核密度函数,并且是该链路的协方差矩阵。等式4还包括时间相关因子α
l
∈[0,1],与时间跨度项t一起实现折扣因子。当响应于接收相邻ue的持续标识而周期性地更新所述遮蔽地图时,时间相关因子α
l
使得向最近接收的相邻ue的标识分配比之前接收的相邻ue的标识更大的权重。所述折扣因子α
l
确保所述模型在遮蔽障碍物本身可以移动的无线通信网络200中保持敏捷性和自适应性。
[0129]
因此,所述图g
″
中的每个边缘或nlos链路包括其两端的所述节点的所述估计位置zv。
[0130]
对于每个链路,所述位置和协方差矩阵可以定义如下:
[0131]
[0132][0133]
因此,假定与节点(v,v
′
)之间的所述nlos通信链路关联的所述信号遮蔽障碍物以所述两个节点v的中间位置为中心。还假定所述信号遮蔽障碍物沿与所述节点之间的直接路径对齐的矢量uv=z
v-zv′
以物理方式展开。还假定所述障碍物具有由与所述直接路径正交的零空间矢量vv=null(uv)定义的范围或跨度。针对所描述通信链路中的一个,这些矢量uv和vv的示例如图5中的516处所示。所述遮蔽障碍物沿所述直接路径在所述矢量vv的方向上的范围定义为可以基于所述信号传输的估计路径损耗的σ
v,v
′
。使用与遮蔽衰落系数成比例关系的特征值σ进行特征值分解,用于生成所述协方差矩阵较大的遮蔽衰落系数最可能与较大的遮蔽障碍物关联,并且导致在评估与标识的nlos通信链路关联的遮蔽因素时,在等式4中使用更宽的核。根据大量实验,在一些无线通信网络中,可以整个所述网络中的位置的函数形式提供所述遮蔽衰落系数σ(z)。然而,如果无法提供所述遮蔽衰落系数,可以使用弗里斯路径损耗公式来根据以下信息获得σ:所述接收节点处的接收功率所述传输节点处的所述传输功率所述接收节点处的接收器增益gv′
:
[0134][0135]
其中,r
v,v
′
=|z
v-zv′
|表示所述传输节点和接收节点之间的距离。所述通信参数gv′
和通常可在所述无线通信网络200内获得,因为ue和基站监视这些参数并且所述网络设备通常收集这些参数。在其它实施例中,可以使用等式7之外的遮蔽衰落度量。然后,在等式6中使用所述估计遮蔽衰落系数σ
v,v
′
,确定所述协方差矩阵进而,在等式4中使用所述协方差矩阵,针对所述地理坐标系250内的所述信号遮蔽障碍物生成可能的位置518。
[0136]
在等式4中,可以根据所述遮蔽地图所需的细节水平选择核函数在一个实施例中,高斯核可以定义如下:
[0137][0138]
上述高斯核的翼从-∞扩展至∞,且所述核具有平滑的转换,导致遮蔽地图函数通常没有虚假的波动和突然的跳跃。对于该核,较小的遮蔽障碍物可以掩埋在较大障碍物的翼下。在替代实施例中,可以使用断壁核等更局部的核,并且以可能更抖动的频谱为代价来提供揭示更小障碍物的能力:
[0139][0140]
假定所述网络环境中的障碍物具有尖锐的物理边缘,则等式9中的所述断壁核可以提供对遮蔽障碍物更准确的表示。
[0141]
参考图6,600和602处示出了用于生成遮蔽地图的模拟结果。左侧的图604以方块示出了网络环境中某个时间内五个遮蔽物体的2d视图,在所述时间内只有所述障碍物中的
三个周围有少数nlos通信链路。中间的图606示出了针对所述图604所示场景,通过kde估计确定的所述估计遮蔽障碍物位置的3d图形表示。右侧的图608是根据所需分辨率在某个高度处从所述图606水平截取的2d切片。在不同高度处截取的水平切片将产生用于估计信号遮蔽障碍物位置的不同范围。稍后,在所述障碍物的每个周围有更多ue并且因此也有更多nlos通信链路时,获取第二组图610至614。随着更多的ue彼此通信,更多的通信链路拦截到障碍物,提高了所述遮蔽地图函数的分辨率。此外,与任何标识的nlos侧行链路通信关联的所述ue中的一个或两个可以处于运动中,并且因此具有随时间改变的ue位置。在这种情况下,所述ue及其相邻ue或基站能够提供用于估计信号遮蔽障碍物的位置的连续nlos标识,进一步提高了kde频谱的分辨率。
[0142]
因此,所述无线通信网络200中的所述节点的集之间的每个通信链路提供遮蔽因素;在等式4中,使用所述函数组合所述遮蔽因素,以生成信号遮蔽位置的整体地图。组合具有大量ue并因此具有大量标识的nlos通信链路的网络中的遮蔽因素,会产生更具代表性的遮蔽地图。
[0143]
通常,遮蔽地图的精度还可以取决于为每个障碍物标识的nlos通信链路集中度之外的因素。所述los/nlos预测模块502引起的不准确性可以导致los链路被推断为nlos链路,反之亦然。所述ue位置估计306的不准确性可以导致节点的位置偏离其实际位置,因此也导致针对所述遮蔽障碍物假定的所述中心位置发生偏离。错误检测的概率通常导致所得到的信号遮蔽地图中存在小偏差,其影响可忽略不计。
[0144]
参考图7,700处大体示出了一个公开实施例提供的由所述遮蔽地图生成器506生成所述遮蔽地图的节点间信令的信号流程图。所述信令涉及两个ue(包括ue1和ue2)以及网络设备。在所示实施例中,所述网络设备包括gnodeb(gnb)基站、所述定位系统(localization system,ls)504,以及所述遮蔽地图生成器(shadowing map generator,smg)506。所述信号流程图700示出了ue1和ue2之间的信令以及ue2和所述网络设备之间的信令。所述信号流程图700还示出了所述网络设备侧的所述gnb、ls和smg之间的信令。所述ue1将侧行链路定位参考信号(sidelink positioning reference signal,sl-prs)702传输到所述ue2,其中包括所述ue1的所述匿名标识符。所述gnb还传输在所述ue2处接收的定位参考信号(positioning reference signal,prs)704。ue2上的所述los/nlos预测模块(图5中的502)处理所述信号702和704中的每一个,以针对所述接收的参考信号生成nlos推断。如果确定通过nlos传播路径接收所述sl-prs 702,所述ue2生成信令706,以通过所述gnb向所述smg传输包括所述ue1匿名标识符的所述nlos标识。所述ue2还传输信令708,所述信令包括根据所述接收的参考信号推导出的信息,例如传输功率、接收功率和接收器增益,所述信息有助于确定用于估计与所述信号702和704关联的所述遮蔽因素范围的信号遮蔽衰落系数。
[0145]
本实施例中使用los侧行链路信息来生成ue位置估计,如果确定通过los传播路径传输所述sl-prs 702和/或prs 704中的任一项,则所述ue2向所述定位系统(location system,ls)传输信令710,其中包括所述ue1和/或gnb的相应标识。所述ue2还需要确定所述参考信号702和704的距离估计信息。所述距离估计通过所述gnb传输至所述ls,使得能够将所述los侧行链路信息用于生成所述ue位置估计。在以其它方式确定所述ue位置估计的其
它实施例中,可以忽略所述信令710。
[0146]
所述ls实现图5中所示的定位系统504,用于接收所述los标识和距离估计,并如上文所述生成ue位置估计306。将所述ue位置估计306提供给所述smg,所述smg使用所述估计以及所述接收的nlos标识信令706和传输功率、接收功率及接收器增益信令708作为图5所示遮蔽地图生成器506的输入。所述smg生成所述遮蔽地图并将遮蔽地图数据712传输到所述网络中的所述gnb和其它gnb,用于配置与所述无线通信网络200中的ue的通信。
[0147]
可能需要来自所述网络设备的其它信令(图7中未示出),例如向每个ue分配和报告匿名的唯一标识符。所述匿名ue标识符的列表使得ue能够标识它从相邻ue接收所述sl-prs的相邻ue,以便向所述网络设备报告nlos通信链路。
[0148]
所述gnb实现持续的信道估计,并持续监视波束失败和/或传输的更高误码率(bit error rate,ber)。在一个实施例中,所述gnb实现波束失败监视功能714,用于监视调整所述调制和编码方案(modulation and coding scheme,mcs)的不成功尝试或所述gnb的传输的高ber发生率。传输失败数量增加可以指示所述信号遮蔽地图已经过时。当这些波束失败数量达到阈值时,所述波束失败监视功能714可以产生信号716,启动所述smg对所述遮蔽地图的更新。所述遮蔽地图生成器506通过生成更新的遮蔽地图数据712,响应从所述gnb接收此类传输失败的所述信号716,所述更新的遮蔽地图数据712被提供给所述无线通信网络200中的所述gnb和其它gnb。
[0149]
图8中的800处示意性地示出了反射图生成实施例提供的无线通信网络的一部分的物理布局示意图。参考图8,所述无线通信网络800包括基站802以及ue 810、812和814。在本实施例中,所述无线通信网络800内的建筑物820和822充当信号反射器。从所述基站802向所述ue 810传输的信号被所述建筑物820反射,产生间接传播路径830。类似地,从所述ue 810向所述ue 812传输的信号被所述建筑物822的一部分反射,产生间接传播路径832;从所述ue 814向所述ue 810传输的信号被所述建筑物822的一部分反射,产生间接传播路径834。所述基站802构成实现所述无线通信网络800的网络设备的一部分,对此下文将进行更详细的描述。
[0150]
参考图9a,在网络设备上实现的用于估计所述无线通信网络800内信号反射器的位置的过程大体如900处所示。这些框大体表示计算机指令或代码,可以执行所述计算机指令或代码,以使构成所述网络设备的各种计算机处理器单元执行用于估计信号反射器的位置的功能。
[0151]
框902指示所述无线通信网络800的所述网络设备从所述网络200中的ue接收距离估计等侧行链路传输信息,所述距离估计指示与在间接传播路径上通过侧行链路传输从相邻ue接收的参考信号关联的距离。例如,在图8中,所述ue 812和814中的每一个分别通过间接传播路径832和834传输参考信号,并且所述ue 810接收并处理这些信号以提取距离估计。所述ue 810通过所述基站802向所述网络设备传输所述距离估计。所述ue 810还为每个参考信号生成接收功率测量并且通过所述基站802向所述网络设备传输所述接收功率。大体如上文结合所述信号遮蔽实施例所述,框904指示所述网络设备以所述ue 810传输的匿名标识符的形式接收所述相邻ue(812和814)的标识。
[0152]
然后,所述过程900的框906指示所述网络设备估计地理坐标系850内的信号反射器的位置。所述网络设备使用所述ue 810至814的所述ue位置估计306、所述接收的距离估
计以及所述接收功率,生成信号反射器位置估计。
[0153]
然后,框908指示所述网络设备使所述基站802根据所述信号遮蔽障碍物的所述估计位置来配置与ue的通信。在一个实施例中,可以持续执行所述框902至908,以确定所述无线通信网络800内的信号反射器因素的位置。可以组合这些标识的信号反射器因素,以生成反射器地图,所述反射器地图表示所述地理坐标系850内的信号反射器的空间位置。可以将所述反射器地图提供给所述基站202至208,以便主动配置通信参数,降低传输失败的频率。
[0154]
可以使用所述无线通信网络800的所述反射器地图,通过促进主动波束成形显著增加所述网络的容量。如果所述网络设备知道可用于反射和重定向传输波束的反射器的位置,则可以指示所述基站选择指向反射器方向的特定波束,以增加信噪比并减少干扰。如图10a所示,如果ue 1000从基站1002接收的信号较弱,所述基站可以主动将传输波束1004指向已知信号反射器1006,使所述信号反射器将所述波束重定向至所述ue。在本示例中,障碍物1008遮蔽了所述基站1002和所述ue 1000之间的直接传播路径。在图10b所示的另一个示例中,若干ue 1012至1016位于由来自基站1010的传输波束1018提供服务的区域内,这可能会在ue处引起干扰。例如,预期发往所述ue 1012的传输可能会干扰从其它基站发往所述ue 1014和1016的其它传输。如图10c所示,所述网络设备可用于检测这种情况,并通过以下方式做出响应:主动将波束1020指向信号反射器1022,使所述信号反射器将所述波束重定向至所述ue 1012,从而减少或消除对ue 1014和10916的潜在干扰。
[0155]
在图10d所示的另一个示例中,所述网络设备可以确定从基站1026指向ue 1028的非常强的los通信波束1030正在引起mimo信道矩阵秩的减小。所述mimo信道矩阵秩是可以在mimo信道上进行空间复用的数据流数的指标。图10d所示的基站可以通过以下方式做出响应:主动将一个或多个其它传输波束1032和1036指向信号反射器1034和1038,使所述其它波束重定向至所述接收ue。然后,在直接波束1030和所述其它波束1032和1036上,可以复用从所述基站到所述ue的所述传输,以改进用于所述信号传输的mimo矩阵秩。
[0156]
参考图9b,920处大体示出了在所述ue 810上实现的方法,所述方法用于生成在用户设备实现的过程900的框902处接收的所述nlos距离估计。所述ue 216之前已从所述网络设备(例如通过所述基站802)接收用于配置los/nlos标识模型的参数322。框324指示所述ue 810使用所述模型来推断是否已通过nlos传播路径(即间接传播路径)从所述相邻ue 210接收侧行链路参考信号。如果是这种情况,则框326指示所述网络设备处理所述参考信号,以确定所述间接传播路径的距离估计。然后,通过所述基站802将所述距离估计连同从其中接收所述通信的ue的标识一起传输至所述网络设备。如果确定所述侧行链路通信为los通信,则不为此目的生成距离估计。
[0157]
如同上文所述的遮蔽实施例,对于ue密集网络,ue之间存在可用于确定反射器位置的大量潜在侧行链路连接。此外,在从所述ue到所述基站的上行链路传输中,所述基站802通常还从所述网络中的所述ue接收参考信号。所述基站802在接收所述参考信号时,可以确定通过上述间接传播路径接收了所述传输的参考信号。类似地,对于所述基站802和所述ue 810至814之间的下行链路传输,ue可以确定通过间接传播路径接收了基站传输的参考信号。用于间接上行链路和下行链路传播路径的距离估计可以有利地与相邻ue之间的间接侧行链路传输的所述标识组合,用于生成所述反射器地图。包括上行链路传输和下行链路传输的一个优点是所述基站802的位置提供锚点位置,这可以提高所得到的遮蔽地图的
空间精度。
[0158]
参考图11,1100处大体示出了用于生成反射器地图的系统的框图,其中所述ue实现信道估计功能1102。所述信道估计功能1102通过上行链路、下行链路和侧行链路传输接收参考信号,并为所述接收的参考信号确定信号传播参数。1120处以功率延迟分布(power delay profile,pdp)的形式示出了接收的pdp参考信号的示例。所述pdp以时间延迟(即,多径信号到达之间的传播时间差)的函数的形式示出了通过多径信道接收的参考信号的强度。在多径环境中,在所述网络中的信号反射障碍物处发生一次或多次反射之后,可以通过直接传播路径或通过间接传播路径接收参考信号。在这种情况下,所述pdp具有对应于直接通过los传播路径接收的参考信号的第一功率峰值p1。第二、第三和第四功率峰值p2、p3和p4对应于在所述网络环境内的反射表面处发生一次或多次反射之后间接接收的参考信号。对于每个接收的参考信号,所述信道估计功能1102确定与所述功率峰值p1、p2、p3和p4对应的距离τ(即所述直接传播路径的距离τ1和所述间接传播路径的距离)。
[0159]
实际上,由于所述ue接收器的有限可解析性、遮蔽、底噪等,可以存在比所述ue检测到的传播路径数量n
mp
更多的间接传播路径。在本公开实施例中,通过应用最小功率阈值γ,可以不考虑涉及多个信号反射器并且因此涉及多次信号反射的间接传播路径。因此,只考虑单次反射间接传播路径,从而降低了复杂性。涉及多次反射的间接信号传播路径(τ3,τ4…
)通常比仅经历单次反射的信号(τ2)弱。因此,所述信道估计功能1102生成定义如下的传播距离子集和相应的功率子集
[0160][0161][0162]
其中,是可以根据以下信息确定的延迟频谱的幅度:所述ue v和ue v
′
之间的信道上的功率延迟分布(power delay profile,pdp)、相干器或任何其它超分辨率伪频谱。选择所述功率阈值γ,使得所述距离的集被限制为所述ue之间单次反射传播路径的n
′
mp
所经过的距离。所述传播距离集和功率集由所述无线通信网络800中的ue通过所述基站(图8中的802)传输至构成所述网络设备一部分的反射器地图生成器1104。在本实施例中,所述ue执行所述阈值功能并且仅传输单次反射路径的距离在其它实施例中,所有距离均可由所述ue传输至所述基站,所述基站可以执行所述阈值功能。
[0163]
所述系统1100还包括所述los/nlos预测模块502,用于实现由所述网络设备生成和训练的所述los/nlos预测模型,以确定与其它ue或基站的通信链路是通过los传播路径还是nlos传播路径。与图5所示遮蔽地图生成系统500的情况一样,所述系统1100还包括所述定位系统504;所述定位系统504从与节点v关联的所述los/nlos预测模块502接收所述los标识。所述定位系统504在为节点v建立提供给所述反射器地图生成器1104的ue位置估计zv时,使用这些标识。
[0164]
再次参考图8,对于所述ue 812与所述ue 810之间的所述单次反射传播路径832的示例,与所述间接传播路径832关联的所述距离τ1确定所述信号反射器822位于3d椭球面的
轨迹上的某个位置;其中,所述3d椭球面的焦距为d且其焦点与所述ue 812和ue 810的位置重合。为便于说明,图8中以2d椭圆840示出了所述3d椭球面。因此,所述椭圆840表示所述反射器822的可能位置,但仍然不确定所述反射器在所述椭球面上的实际位置。随着在所述无线通信网络800中侧行链路、上行链路或下行链路信号被所述建筑物822反射的ue的数量增加,关于所述反射器的位置的不确定性减小,从而便于产生所述反射器的位置估计。例如,所述ue 814和所述ue 810之间的所述侧行链路建立了另一个椭球面轨迹842,这将所述建筑物822处所述反射器位置的所述不确定性减小至位于所述椭球面840和842之间交点处的不确定性云846。类似地,所述ue 814和所述基站802之间的所述链路建立了另一个椭球面轨迹844,这将所述建筑物820处所述反射器位置的所述不确定性减小至不确定性云844。对于其中ue在空间上分散的密集网络,可以估计在地理坐标系850内重要反射障碍物的位置。基于所述ue之间的侧行链路以及ue和所述基站之间的上行链路/下行链路的进一步观察信息可进一步减小所述不确定性云844和846的大小。
[0165]
通过假定所述ue处于同一2d平面,可以简化问题,使得与每个对应的所述反射器因素位于所述ue 812和ue 810的焦点所在的焦距为d的椭圆上。从数学上讲,这可以写作:
[0166][0167]
其中,(z1,z2)是第n
mp
个反射器的焦点,和分别是通信节点v和v
′
的位置。可以根据所述定位系统504生成的所述ue位置估计306获取所述位置。或者,在某些情况下,可以通过基站等节点的地面真值位置获得这些位置。实际上,即使在可以获得地面真值位置的情况下,也会由于以下若干原因而不符合等式12:
[0168]
i.所述距离的估计受到估计噪声的污染,所述估计噪声的方差下限受克拉美罗下限(cram
ér–
rao lower bound,crlb)的制约;
[0169]
ii.如果所述节点v和v
′
是移动用户,其位置zv和/或zv′
还受到一些有限方差的两个独立估计噪声的污染,这是因为zv和zv′
是根据未知直接路径距离进行估计的;
[0170]
iii.节点v和v
′
不是完全时间同步的,因为它们由具有不同偏置和偏斜的时钟信号驱动。
[0171]
在等式12中,可以通过引入如下所示的加性噪声项考虑所述缺陷(i)和(ii):
[0172][0173]
其中,是一个加性噪声项,所述加性噪声项可以用高斯分布以良好的精度进行建模。可以假定距离估计的所述crlb与所述接收的信噪比成反比,得出:
[0174][0175]
其中,是所述测量和记录的第n
mp
个间接传播路径的功率。
[0176]
由于所述ue和基站的时钟生成器通常不同步,因此在无线通信网络800中的节点
之间存在时钟偏移和偏置。所述时钟偏移和偏置导致节点v和v
′
之间的信道的功率延迟分布(power delay profile,pdp)发生未知循环位移。可以假定所述网络中的每个节点具有独立的时钟生成器,这意味着所述网络中节点之间的链路的所述pdp会发生独立时移。在所述网络实现时钟同步协议的情况下,不可假定所述时移是独立的。
[0177]
参考图12,示出了两个节点处具有此类独立时移的两个pdp分布1200和1202的示例。对于所述链路而言,pdp 1202相对于所述pdp 1200移位时间δ
v,v
′
的事实意味着:所有pdp峰值同时移位,即该时移使所述网络800中的反射器的估计位置出现偏置。为了解决这个问题,可以执行以下过程:
[0178]
i.使用基于已知锚点位置的到达时间差(time difference of arrival,tdoa)技术,估计无偏置位置估计zv:其中是所述网络中具有到节点v的距离测量的基站集。该步骤依赖于当前实现的蜂窝网络中可提供的基站间时间同步;
[0179]
ii.使用以下等式估计同步误差:
[0180]
iii.求所述同步误差的平均值:
[0181]
iv.建立间接路径延迟集:
[0182]
利用上述等式,与对应的所述反射器的所述轨迹概率按以下等式计算:
[0183][0184]
等式15表示与对应的所述反射器的所述轨迹的概率。为了根据该概率找到z的后验pdf(这是后续阶段被动位置学习所需的),如下所示应用贝叶斯定理:
[0185][0186]
pdf表示关于要并入所述模型中的所述反射器位置的先验信息。当没有此类先验信息可用时,可以选择具有最大熵的均匀先验,从而得出:
[0187][0188]
从所述ue信道估计功能1102接收的所述传播距离集和功率集可用于生成标记的连接图g=(v,e),其中针对每个边缘标记了距离测量信息;所述每个边缘包括相邻ue之间的侧行链路通信链路,以及ue和基站之间的上行链路/下行链路连接链路。以表示所述网络800中所有节点(ue和基站)的集,并且以表示符合以下情况的
节点的集:(i)连接到ue v;(ii)其传播距离集和功率集是在所述反射器地图生成器1104处从ue v接收的,所述连接图g定义如下:
[0189][0190][0191]
将根据所述定位系统504确定的位置估计304相加,等式18中的所述连接图转换为定义如下的标记图g
″
=(v
″
,e
″
,l
″
):
[0192][0193][0194][0195]
在等式19中,v
″
,e
″
和l
″
分别表示所述图g
″
的顶点、边缘和标记集;运算符表示仅保留所述连接图中可以为其估计ue位置的顶点v的恒等函数。表示ue v附近符合以下情况的ue集:(i)连接到节点v;(ii)对v进行了距离测量。所述集和是等式10和11中定义的与g
″
的边缘(v,v
′
)关联的传播距离集和功率集。虽然,对于在所述基站处从ue接收的通信,所述基站可以观察和但对于ue间的侧行链路通信,所述基站无法按照此类方法直接或间接推断出这些信息。因此,需要将所述观察信息从ue发送至所述基站。尽管在所描述的本实施例中仅考虑间接单次反射信号传播路径,但是在一些实施例中,所述传输的集和集可以包括关于所有解析的间接路径信号分量的信息。此外,由于所述必需ue位置估计306可以部分地基于相邻ue之间的los侧行链路连接,因此在一些实施例中,ue可以传输包括所有直接和间接信号分量的如果任何所述ue在所述无线通信网络800内移动,则可以传输连续的集,从而在提供所述空间数据之外还提供时间数据。
[0196]
所述反射器地图生成器1104在所述图g
″
上实现核密度估计(kernel density estimation,kde)算法,从而通过更新以下度量生成所述反射地图:
[0197][0198]
其中,等式16或17中的充当用于产生在图11中1116处以椭圆表示的所述反射器地图的核密度函数。所述时间相关因子α
l
∈[0,1]和时间跨度项t实现折扣因子,使得当响应于接收正在进行的观察集而周期性地更新所述反射器地图时,向最近接收的观测信息分配比之前接收的观测信息更大的权重。这有助于在反射信号的所述障碍物可以移动的无线环境中,使模型保持敏捷性和自适应性。
[0199]
参考图13,1300处示出了用于生成反射器地图的模拟结果。左侧的图1302以点的形式示出了节点v和v
′
,其中椭圆1304表示所述节点间最强的间接传播路径,椭圆1306表示
第2最强的间接传播路径,椭圆1308表示第3最强的间接传播路径。1310处的所述反射器地图具有环形概率密度函数的外观,集中在(zv zv′
)/2,且具有扩展的所述扩展的被选择为与图形边缘(v,v
′
)处的第n
mp
个功率的接收功率幅度成反比。1312处的所述反射器地图已更新,以包括其它间接链路推断,并且所述位置后验产生具有较低不确定性的pdf。
[0200]
参考图14,1400处大体示出了一个公开实施例提供的由反射器地图生成器1104生成所述反射器地图的节点间信令的信号流程图。所述信令涉及两个ue(包括ue1和ue2)以及网络设备。在所示实施例中,所述网络设备包括gnodeb(gnb)基站、所述定位系统(localization system,ls)504,以及所述反射器地图生成器(reflector map generator,rmg)1104。所述信号流程图1400示出了ue1和ue2之间的信令以及ue2和所述网络设备之间的信令。所述信号流程图1400还示出了所述网络设备侧的所述gnb、ls和rmg之间的信令。可以在与处理器可读存储器通信的处理器单元上实现所述rmg,所述处理器可读存储器存储使所述处理器执行上述功能的处理器可执行指令。
[0201]
所述ue1向ue2传输包括所述ue1的所述匿名标识符的侧行链路定位参考信号(sidelink positioning reference signal,sl-prs)1402。所述gnb还传输在所述ue2处接收的定位参考信号(positioning reference signal,prs)1404。所述los/nlos预测模块502处理所述信号1402和1404中的每一个;如果确定是通过los传播路径接收的,则所述ue2向所述ls传输包括所述ue1和/或gnb的相应标识的信令1406,用于生成ue位置估计。所述ue2还为所述参考信号1402和1404确定距离估计信息,用于向rmg进行传输。所述ls接收所述los标识和距离估计,并且如上文所述生成ue位置估计306。在以其它方式确定所述ue位置估计的其它实施例中,可以忽略所述信令1406。
[0202]
所述ue2上的所述信道估计功能1102还处理所述sl-prs和prs信号1402和1404,以生成包括如上所述传播距离集和功率集的信令1408。因为反射地图构造算法通过将间接传播路径延迟和与所述链路关联的节点(v,v
′
)的估计ue位置关联来工作,所述信令1408带有所述相邻ue的匿名id,使得能够确定所述节点的位置,如上文结合所述遮蔽地图生成所描述的那样。
[0203]
所述rmg如上所述生成反射器地图数据1410,并将所述数据传输至所述网络中的所述gnb和其它gnb,用于配置与ue的通信。在本实施例中,所述gnb实现如上文结合所述遮蔽地图生成实施例描述的波束失败监视功能714。所述gnb小区内信号传输的波束失败引起所述波束失败监视功能714产生信号1412,使所述rmg更新所述反射器地图。
[0204]
参考图15,1500处大体示出了所述网络200和800中组成所述网络设备的模块之间的信息流流程的框图。所述流程1500包括上文结合所述遮蔽地图生成系统500所描述的元件、所述反射器地图生成系统1100以及在所述网络中实现这些功能所涉及的其它元件。
[0205]
一个或多个基站和多个ue在例行通信期间传输和接收参考信号。如上所述,在每个基站和ue节点上实现所述los/nlos预测模块502。所述los/nlos预测模块502处理在所述节点处接收的参考信号,并且用于通过接收los/nlos预测参数322来运行。所述参数322由在所述网络设备上实现的训练模块1502生成。所述训练模块1502接收由处理上行链路、下
行链路和侧行链路通信的los标签生成模块1504生成的标记los训练数据。所述参数322可以由所述los标签生成模块1504和训练模块1502持续生成,并周期性地传送到基站和ue,以针对当前网络情况更新所述los/nlos预测模块502。因此,所述los/nlos预测模块502处理在每个基站和ue处接收的参考信号,并将所述接收的信号标识为已通过los或nlos传播路径接收。
[0206]
直接传播路径标识模块1506估计所述直接传播路径的所述距离参数。然后,将所选择的直接路径距离估计馈送到所述定位系统504。所述定位系统504以协作(并行)或非协作(顺序)方式估计所述ue位置。由所述定位系统504生成准确无偏差的ue位置估计在减小空间位置误差方面是有效的。空间位置误差通过所述流程1500传播,并且在产生的所述遮蔽和反射数据中显现出来。降低至少部分地根据间接nlos通信而确定ue位置估计的发生率,减少了所述反射器地图中的位置偏差。
[0207]
如上文所详细描述,所述遮蔽地图生成器506根据所述定位系统504提供的nlos标识和位置估计生成所述遮蔽地图。所述遮蔽地图生成器506产生遮蔽地图数据,以提供给所述基站的通信子系统,用于配置与ue的通信。
[0208]
与所述直接传播路径标识模块1506并行,间接传播路径标识模块1508为节点间的第2个或者后续间接路径距离估计距离参数。所述间接路径距离估计被馈送到所述反射器地图生成器1104。如上所述,在一些实施例中,仅可以选择经历单次反射的间接传播路径,并且所述模块1508可以丢弃多个反射路径的距离估计。
[0209]
如上文所详细描述,所述反射器地图生成器1104从所述定位系统504接收所述位置估计,从所述模块1508接收所述间接距离估计,并且生成包括信号反射器的位置的反射器地图。所述反射器地图本身不提供关于哪些信号反射器可以用于基站与ue之间的通信的信息。
[0210]
在本实施例中,所述流程1500还包括为便于所述基站进行位置感知波束控制而实现的波束预测生成器模块1510。一旦已知所述无线通信网络800中重要反射器的位置,基站可以配置为利用这些已知的反射器为与特定ue的上行链路和下行链路通信做出波束选择和波束控制判决。
[0211]
所述波束预测生成器模块1510对所述反射器地图数据1410进行操作,所述反射器地图数据1410包括基站v可能用于将传输波束重定向至ue v
′
的可能的反射器位置所述波束预测器1510还接收所述基站v和所述ue v
′
的位置估计所述基站v具有确定的位置所述ue v
′
具有估计位置
[0212]
参考图16,1600处大体示出了在所述波束预测生成器模块1510上实现的神经网络。所述神经网络包括多个层1604中全连接节点1602的集,所述多个层1604包括输入层1606、输出层1608和多个隐藏层1610。所述输入层1606包括接收所述发送器位置zv和所述接收器位置zv′
的节点。所述输出层1608包括提供反射器位置的输出节点。连接所述节点的每个箭头可以具有关联的加权因子wi;如下文所述,在针对一组标记的训练数据执行的训练练习1512中确定所述加权因子wi。
[0213]
通过以下方式,使用等式20中的所述反射器地图针对位置zv,zv′
生成一组标
记的训练数据
[0214]
i.将促进生成如上所述反射器地图的上行链路和下行链路通信的每个后验
[0215]
相乘;
[0216]
ii.针对与用于所述上行链路和下行链路通信的上行链路和下行链路关联的所述反射器,确定最可能的反射器位置。
[0217]
上述步骤i和ii可以合并为以下表达式:
[0218][0219]
其中,是在处达到的目标函数最大值。在用于链路(v,v
′
)的可用反射器之间,选择幅度最大的反射器,并按如下所示输出其位置:
[0220][0221]
其中,运算符发现第2个自变量最大的双元并且返回相应的第一自变量在等式21和22中,仅考虑基站与ue之间的上行链路和下行链路通信(即),因为通常波束成形位于基站处比位于ue处更切合实际。基站可以具有物理取向固定的天线阵列,而移动ue可以具有物理取向不断变化的天线。此外,尽管ue的天线尺寸受到所述ue的尺寸的限制,但是所述基站天线可以做得更大,从而便于产生可以更精确地指向所选反射器的更窄的传输波束。
[0222]
然后,将所述反射器定位标签与链路(v,v
′
)的所述位置配对,以生成训练集在本实施例中,只有最重要的反射器位置才通过等式22来选择。在其它实施例中,可以取消此限制,并且以表示的前几个重要反射器位置可以作为训练数据集的输出。所述训练集在训练练习中用于确定所述神经网络1600的权重wi,从而通过有效反射器生成从所述发送器到接收器位置的映射。使用所述训练的神经网络1600生成可以泛化到不可见的反射器示例的映射,并且还可以减轻使用噪声标签进行训练的影响。因为所述神经网络1600具有低维输入层1604和输出层1606,所述神经网络的宽度和深度相对适中,但应具有足够的层深度以很好地泛化。在本实施例中,所述神经网络1600示为完全与隐藏层1610连接,所述隐藏层1610的大小先逐渐增加,然后减小。在其它实施例中,所述神经网络1600可以进行不同的配置。然后,可以将所述神经网络配置及所述训练的权重wi传递到所述基站,在所述基站将所述训练的网络用作进行前摄波束控制判决的模型。
[0223]
可以按下文示例的描述,以各种组合中的任何一种提供本文公开的上述特征和/或其它特征。
[0224]
根据示例1,一种用于估计无线通信网络中信号反射器的位置的方法包括:网络设备从与所述网络通信的用户设备(user equipment,ue)接收侧行链路传输信息,所述侧行
链路传输信息包括:指示与通过所述侧行链路传输在间接传播路径上从相邻ue接收的参考信号关联的距离的距离估计、与每个接收的参考信号关联的接收功率、所述相邻ue的标识;根据与所述侧行链路传输关联的ue的位置信息、所述接收的距离估计以及所述接收功率,估计信号反射器的位置;根据至少一个信号反射器的估计位置,配置所述网络设备与至少一个ue之间的通信。
[0225]
根据示例2,示例1所述的方法还可以包括:从ue接收以下信息:在所述ue处通过间接传播路径从所述基站接收的参考信号的距离估计、每个接收的参考信号的接收功率;并且估计信号反射器的位置还包括:根据所述ue的位置信息、所述基站的位置、所述接收的距离估计和所述接收功率,估计信号反射器的位置。
[0226]
根据示例3,示例1所述的方法还可以包括:在所述基站处接收ue传输的参考信号,并生成以下信息:在基站处通过间接传播路径从所述ue接收的参考信号的距离估计、通过间接传播路径接收的每个参考信号的接收功率;并且估计信号反射器的位置还包括:根据所述基站的位置、所述ue的位置信息、所述接收的距离估计和所述接收功率,估计信号反射器的位置。
[0227]
根据示例4,在上述示例的任何一个中,使所述基站配置传输可以包括以下各项中的至少一项:将传输波束指向信号反射器,使所述信号反射器将所述波束重定向至对传输信号的接收较弱的ue;响应于确定一个或多个ue位于受到指向接收ue的传输波束干扰的区域,将所述波束指向信号反射器,以使所述信号反射器将所述波束重定向至所述接收ue;响应于确定通过强视距(line-of-sight,los)传输波束向ue执行的传输正在使能够在所述传输波束中进行空间复用的数据流数量减少,将至少一个其它传输波束指向信号反射器,以使所述信号反射器将所述至少一个其它传输波束重定向至所述接收ue;在所述直接波束和所述至少一个其它传输波束中进一步复用所述传输。
[0228]
根据示例5,在上述示例中的任何一个中,所述方法还可以包括通过以下各项中的一项或多项为所述标识的ue中的至少一部分生成位置信息:为所述网络设备和所述ue中的至少一部分之间的上行链路或下行链路传输生成距离估计;为ue之间的视距(line-of-sight,los)侧行链路传输接收距离估计;接收标识所述ue中的至少一部分的位置的全球定位系统(global positioning system,gps)信息;使用与所述基站或所述ue关联的已知位置信息。
[0229]
根据示例6,在上述示例中的任何一个中,确定信号反射器的位置可以包括:生成连接图,所述连接图具有与所述网络中网络设备对应的节点以及与位置信息可用的ue对应的节点;对于所述连接图中的每个间接参考信号传输,建立表示所述反射器的可能位置的轨迹;组合所述连接图中的所述间接参考信号传输的所述轨迹,以生成表示所述无线通信网络中反射障碍物的位置的反射器地图。
[0230]
根据示例7,示例6所述的方法还可以包括:响应于接收侧行链路传输信息,更新所述反射器地图;向最近接收的侧行链路传输信息分配比之前接收的侧行链路传输信息更大的权重。
[0231]
根据示例8,在示例6所述的方法中,组合所述轨迹可以包括:使用核密度估计来生成反射器位置的概率密度函数。
[0232]
根据示例11,示例6所述的方法还可以包括:响应于从所述网络设备接收所述网络
设备和所述ue之间的传输失败的通知,发起对所述反射器地图的更新。
[0233]
根据示例12,在上述示例中的任何一个中,所述ue中的至少一个可以具有随时间变化的位置,并且估计信号反射器的位置包括:根据连续接收的与所述侧行链路传输关联的所述ue的侧行链路传输信息,估计信号反射器的位置。
[0234]
根据示例13,示例6所述的方法还可以包括:从所述反射器地图中选择最重要的反射器位置,用于所述基站与所述连接图中的ue节点之间的传输;使用所述基站和所述ue的位置作为神经网络的输入,并训练所述神经网络,以输出最重要的反射器位置;使用所述训练的神经网络,为所述网络中所述基站和所述ue中的一个之间的间接传输生成波束方向。
[0235]
根据示例14,用于无线通信网络的网络设备包括:基站,包括发送器和接收器;处理器,与所述基站通信;处理器可读存储器,与所述处理器通信并存储处理器可执行指令。在所述处理器执行所述处理器可执行指令时,使所述处理器执行一种方法,所述方法包括:在所述基站的所述接收器处,从与所述网络通信的用户设备(user equipment,ue)接收侧行链路传输信息;所述侧行链路传输信息包括:距离估计,指示与通过所述侧行链路传输在间接传播路径上从相邻ue接收的参考信号关联的距离;与每个接收的参考信号关联的接收功率;所述相邻ue的标识。所述示例还包括:使所述处理器根据与所述侧行链路传输关联的ue的位置信息、所述接收的距离估计以及所述接收功率,估计信号反射器的位置;根据至少一个信号反射器的估计位置,配置所述基站与至少一个ue之间的通信。
[0236]
下文参考图17至图27,进一步描述了图5和图11所示的los/nlos预测模块502和定位系统504。图17示出了无线通信网络和nlos场景的框图;所述场景对于ue定位确定可能存在问题。在所示示例中,所述无线通信网络1700包括bs 1702、1704、1706和ue 1708,并且所述ue的运行环境包括两个障碍物1710和1712。1720和1722处示出了los路径,在1724处示出了nlos路径。所述障碍物1712阻挡了所述ue 1708和所述基站(base station,bs)1704之间的另一条los路径1726;因此,1728处示出了“弱”los路径。在这种场景下,沿nlos路径1724传播的射线可能比沿所述弱los路径1728传播的射线强;因此,在所述ue 1708处无法仅根据接收的信号功率来将这些los射线和nlos射线区分开来。
[0237]
尽管用于ue定位确定的基于几何的方法可能简单且具有成本效益,但是这类方法往往在los场景中以及在满足关于信号、噪声、信道和阵列模型的特定假设时很有效。然而,在无线通信网络中,nlos场景更为常见且切合实际。
[0238]
如上所述,解决所述nlos问题的措施包括los标识和los缓解。可以存在有限数量的bs能够随时与ue通信,因此los标识可能导致作为定位锚用于定位ue位置的bs太少。例如,为了使用三角测量在三维(three dimensional,3d)空间定位ue,需要至少四个bs。对于城市区域的蜂窝系统中,nlos的概率通常高于los的概率,因此这个问题可能尤为突出。尽管los缓解提供的nlos误差扣除可能使所有链路可用于定位确定,但los缓解是比los标识更难解决的问题。
[0239]
考虑到所述los缓解问题的复杂性,对于定位确定,los标识仍然是有吸引力的选择。尽管仅使用los链路进行定位确定的技术通常称为los标识技术,但应注意,本文所公开实施例提供的los标识可以涉及标识los链路、标识nlos链路和/或以其它方式将los链路和nlos链路彼此区分开来。无论实际标识的链路的类型如何,确定哪些链路是nlos链路并将其从定位确定中移除是提高基于los标识的定位或位置系统的精度的重要步骤。例如,如果
事先不知道关于nlos链路的定位或位置统计信息,则最佳定位算法是确定哪些链路是nlos链路并从所述定位确定过程中消除所述nlos链路的算法。这是因为克拉美罗下限(cram
ér–
rao lower bound,crlb)不依赖于nlos链路。本质上,los标识是比los缓解简单得多的问题,但是实现可靠的los标识仍然是一项挑战。
[0240]
在即将向5g转型之际,侧行链路(sidelink,sl)通信正在成为推动变革的一个重要驱动力,特别是在ue协作和车联网(vehicle-to-everything,v2x)通信等应用日益盛行的情况下。sl通信是指近距离ue能够直接相互通信或协作,而不通过网络通信。因此,sl是ue之间的直接无线通信链路的示例。通过多输入多输出(multiple input multiple output,mimo)等方式尽可能充分利用空间分集,预计存在巨大的潜力并可增强通信网络容量。
[0241]
sl通信对于定位也可能有利,并且可以用于解决所述定位领域面临的一些长期挑战,例如实现准确可靠的nlos消除、锚点不足等。例如,遮蔽是引起nlos的主要现象,但是在米级范围内这种相关性较弱。例如,参考图17,位于所述ue 1708仅几米距离内(例如在所述bs 1702附近或在所述bs 1706附近)有另一个ue不受所述障碍物1712的遮蔽影响,并且与所述bs 1702、1704和1706中的每一个进行los通信。
[0242]
这样,如果ue可以成为彼此的“定位代理”,则可以潜在地检测到遮蔽。可能甚至更重要的是以下事实:在sl通信中los的概率预计比在上行链路(uplink,ul)或下行链路(downlink,dl)通信中高,因为预计仅在有限的地理区域内允许通过sl通信进行ue协作,以节省ue功率并使通信网络中的sl干扰模式保持受控状态。
[0243]
本文所公开的一些实施例涉及构建或训练使用机器学习(machine learning,ml)并且示例性地使用神经网络(neural network,nn)来预测nlos链路的存在的模型。在一些实施例中,在收集用于构建或训练此类模型的数据时使用ul、dl和sl通信及测量信息。本发明包括以下实施例:即,利用现有的通信网络基础设施,而不是昂贵的非自治专家系统,来以显著更大的规模并且可能以不间断的方式生成训练数据集,而不依赖可从专家系统获取的数据集,后者的噪声可能更低但规模也小得多。
[0244]
通常通过假设测试框架来区分los链路和nlos链路。这涉及建立所述接收的信号的统计x的似然比λ(x),并且判决所述两个假设(los)和(nlos)中的一个胜出:
[0245][0246][0247]
其中,和分别是los和nlos的概率分布函数(probability distribution function,pdf)或似然比。如果los和nlos下的x分布存在充分差异,则上述似然比检验(likelihood ratio test,lrt)可以帮助做出los/nlos判决。确定该比率需要知道所述pdf以及依赖于通常通过离线调查收集的广泛先验知识的阈值γ。理想情况下,其中是发生的地面真值概率。然而,无法精确获知此值,因此需要通过实验来找到最佳估计。在los/nlos发生频率相同的环境中,γ=1。
[0248]
为了获得用于ml训练的标记数据,使用超宽带(ultra-wideband,uwb)无线系统或高分辨率成像系统中的专家系统。然而,用于标记数据收集(又称为“指纹收集”)的此类方法的一个问题是,这些类型的系统运营成本高昂。生成的标记数据也并非完全没有错误。此
外,可能存在可扩展性问题,特别是在无线网络中使用专家系统的情况下,其中由于环境经历频繁的改变,因此需要从新环境中间歇地收集训练数据以便进行再训练。例如,对于一个分辨率为1m
×
1m的100m
×
100m区域,仅一个标记数据集就需要收集10,000个不同的指纹。显然,这对基于专家系统的实现方式中的更高分辨率、更大区域和/或重新训练构成了可扩展性挑战。
[0249]
当忽略环境变化并且以旧数据集来训练ml或人工智能(artificial intelligence,ai)模型,使用所述ml或ai模型来预测信道条件已经改变的位置处的nlos偏差时,可能会引入显著的预测误差。这个问题称为概念/特征漂移,并且由此产生的所述预测误差可以通过误告警或检测错误等形式来体现。
[0250]
有助于减轻或补救漂移和相关预测误差的一种可能方法是,将涉及标签收集和训练的探测子系统转变为或集成到利用已训练模型的探测子系统中。例如,一种此类方法可以依赖于通信网络在正常通信期间收集大量数据的“众包”能力。这实际上利用了ue的分布和移动性质,来收集用于训练的大型数据集。因此,可以利用现有的基础设施,而不是昂贵的非自治专家系统,来以显著更大的规模和不间断的方式生成用于训练的数据,而无需依赖来自专家系统的较少量的标记数据。
[0251]
总体上,用于los标识的现有ml方案具有几个缺点,包括依赖于专家系统的可用性,相关成本较高,属于劳动密集型,而且随着无线通信环境不断变化而对特征和概念漂移不具备稳健性。
[0252]
本发明部分地涉及一种用于以下用途的模型:以具有成本效益的自适应方式,根据从ul、dl和sl通信中收集的或以其它方式确定的距离估计来预测los/nlos链路的存在。其它信息,例如基于ul通信的角度估计,也可以用于构建或训练此类模型。
[0253]
在一些实施例中,用于开发模型的训练数据包括元组集合{(x,w)
l
}
l
,其中,x是具有空间独特性但可临时复制的第l条链路的特征,w指示第l条链路是nlos、los还是未知状态。例如,在一个实施方案中,w∈{-1,0,1}指示所述链路是nlos(w=1)、los(w=-1),还是状态未知或不明确(w=0)。
[0254]
用于收集标签或训练数据的当前方法是如上所述的穷举过程。需要专家系统通过从每个bs收集数据x来调查所述环境,然后确定观察到连接该bs的链路是否是nlos链路,以便可以生成标签w并且可以建立(x,w),然后再移动到一个新位置以重复此过程。获得没有错误的标签是一项耗费精力和成本的任务。当链路被阻塞时,根据接收的信号功率进行的检查本身并不能可靠地指示los的存在与否。相反,需要具有多ghz采样率的高可解析性专用系统(例如uwb系统),才能检测是否存在具有更强间接路径分量的信号直接路径分量。由于缺乏同步、阻塞等此类情况,即使经常用于训练数据收集的专家系统也会向标记过程中引入一些错误。实际上,无法通过精简的过程实现完全纯净无误的标签。
[0255]
根据本发明的理念,使用在网络中通信的相同设备(例如ue和bs)来生成用于构建或训练模型的标签。尽管这可能在所述标记过程中引入一些错误,但是可以持续更新数据集而不需要经过离线探测或测量阶段,以收集用于训练的数据或以其它方式构建模型,此过程与使用所述模型进行预测的预测阶段或探测阶段分离。
[0256]
在支持ul、dl和sl通信的通信网络中,通常用于建立和/或维持通信链路的参考信号(reference signal,rs)也可以用于估计网络元件之间的距离。参考图18,其中示出了另
一个示例性无线通信网络的框图。
[0257]
所述示例性无线通信网络1800包括bs 1802和1804(分别示为示例性gnodeb(gnb)),以及ue 1810、1812、1814、1816、1818和1820。所述ue的运行环境包括:反射器1830、1832和1834形式的障碍物;遮蔽障碍物1840、1842和1844。未阻塞的los链路以实线示出,并且在图18中使用不同类型的虚线来示出受遮蔽影响的nlos链路和los链路。gnb 1802和1804之间的路径以实线示出,但是在距离估计的情况下可以视为特殊类型的los链路,因为在很多实施例中bs位置预计是已知且是固定的,并且bs间的距离是已知的或者很容易确定。这种类型的los链路在本文中又称为虚拟los链路。
[0258]
图18中示出的任何或所有链路上都可以发生通信,并且一些实施例中利用这些通信来建立连接图。连接图包括表示ue和bs等通信网络节点之间的链路的边缘,并且还包括为那些链路或边缘获取的相应距离估计。例如,图18所示的ul/dl距离估计和sl距离估计可以传输至网络设备,例如gnb中的一个或单独的定位服务器,以进行进一步处理。全连接图在本文中又称为g=(v,e)。
[0259]
表示所述网络中所有节点(ue和bs)的集,表示(i)连接到ue v并且(ii)与v进行距离测量的节点的集,所述连接图g通过以下等式给出的顶点集v和边缘集e定义:
[0260][0261][0262]
在一些实施例中,为了建立网络设备处的g,每个ue将指示以下集的信令中继到该网络设备:
[0263][0264]
其中,表示(i)与ue v连接并且(ii)与ue v之间进行距离估计的ue的集,表示ue v和v
′
之间的sl距离估计,x
v,v
′
表示sl信道数据的处理版本,在本文又称为信道张量;所述信道张量通过将原始信道数据h
v,v
′
转换为没有或至少已减少抑制学习的伪波动的形式获得,所述伪波动包括随机同步误差和小尺度相位(small scale phase,ssp)。互协方差张量是x
v,v
′
的一个示例。
[0265]
类似地,表示(i)与ue v连接并且(ii)与ue v之间进行dl距离测量的bs的集;在一些实施例中,所述ue还向要建立所述连接图的网络设备中继指示以下集的信令:
[0266][0267]
其中,表示bs v
′
和ue v之间的所述dl距离估计,x
v,v
′
表示上述信道张量。
[0268]
全连接图也可以考虑即每个bs作为ul距离测量的结果推断出的信息集。与每个ue一样,如果所述连接图不是所述bs本身生成的,每个bs可以向生成所述连接图的网络组件发送指示该集的信令。
[0269]
给定集可以建立全连接图,并且可以按照本文其它地方详述的示例所公开的内容,生成所述张量x
v,v
′
的nlos/los标签。这些标签和张量随后用于训练,本文还通过示例公开了所述训练。
[0270]
在一些实施例中,当没有针对特定sl/ul/dl的距离估计或者链路的距离估计过时时,会移除所述连接图中的相应边缘或用新的距离估计进行更新。距离估计过期涉及ue移动性等引起的环境变化,结果导致通信网络中ue和其它元件之间的距离随时间变化。在通信网络中没有任何阻塞或遮蔽的情况下,所有链路都是los链路。在这种情况下,在所述全连接图中,以cirr=(vr,er)表示的任何闭合连接路径(例如“三角形”或更一般地,环路、“循环”或“环”r)具有以下特性:
[0271][0272]
其中,τ是对ul/dl/sl中真实距离的一般表示,vr,er是所述全连接图中第r个子图环cirr的顶点和边缘。在本发明中,闭合连接路径通常称为“环”,这仅仅为了便于参考。然而,应当理解的是,闭合连接路径或环路在形状上不一定是圆形,也可以是三角形或更一般的多边形。
[0273]
图19示出了连接环路示例的框图。图19中的示例(b)和(d)适用于图18所示的ue位置,并且示例(a)和(c)涉及与图18所示ue位置不同的ue位置。图18所示的示例中还示出了其它连接环路,并且还应该注意的是,所述其它连接环路可以随着ue的移动而动态地出现和消失。
[0274]
一般而言,等式27指定闭合连接路径中任何边缘的距离应小于该闭合连接路径中其它边缘的距离之和。在|er|0=3的简单情况下,等式27是三角形不等式。实际上,一些链路可以是图18所示的nlos链路,这导致和因为并且因此,包括一个或多个距离估计和/或的环可能不满足等式27。当与闭合连接路径关联的任何距离估计不满足等式27时,可以非常肯定地断言是在nlos链路上获得的距离估计。然而,如果满足等式27,则不能做出关于获取的所述链路los/nlos状态的确定结论。对于具有三个或更多个边缘的连接环路,如果违反等式27,则肯定是nlos链路;然而,满足等式27的链路可能是los链路,也可能是nlos链路。
[0275]
为了潜在地提高检测nlos的概率,可以对全连接图g执行穷举搜索,以找到每两个节点v,v
′
之间的最小距离环:
[0276][0277]
其中,是所述图中的环的集,是根据距离或距离估计达到最小总延迟的环的索引,所述距离或距离估计与构成包含v,v
′
的环的边缘关联。等式28实际上表示搜索整个所述连接图,以找到连接每两个节点的所有环,获得每个环上的延迟之和并且找到所有这些环上的最小延迟和。然后可以评估以下标准:
[0278][0279]
该标准基于以下预期:即,距离估计大于最小距离环的完整延迟的任何链路可能是nlos路径。可以使用处理高于所述阈值的距离估计的相同方式,或者使用处理低于所述阈值的距离估计的相同方式,处理其中的等式条件。例如,可以使用处理高于所
述阈值的距离估计的相同方式处理所述等式条件,以潜在地增加可以生成确定标签的训练样本的数量。在其它实施例中,因为与等式29中的不等式相比,所述等式条件对nlos条件的确定性更低,因此可以优选地使用与处理低于所述阈值的距离估计相同的方式来处理所述等式条件,以降低nlos的检测错误概率。
[0280]
对等式28和29检查注意,由于e定义如上,等式28排除了bs间边缘。不必在所有实施例中排除bs间链路。例如,通信网络可以潜在地包括一个或多个诸如无人机bs的可移动bs,并且本文公开的技术可以用于包括至少一个可移动bs的bs间链路。
[0281]
如果通信网络中的所有ue能够彼此通信并且能够与所有bs通信,则如以下等式所示,在集中有n
circ
个环:
[0282][0283]
其中,n
bs
和n
ue
分别表示集中的bs数量和集中的ue数量,并且表示“a选b”的运算。在确定n
circ
时,项k限制为大于三,因为任意两个网络元件或节点v,v
′
之间的环或闭合路径包括这两个网络元件或节点以及至少一个或多个网络元件或节点。
[0284]
所述集包含许多可能性,图19中示出了其中一些示例。尽管图19所示的示例(a)和(d)包括bs间链路,但是在所有bs均固定的通信网络中不必测量bs间距离。对于固定bs,每个bs的地面真值位置是可用的,并且可以用于确定bs间距离。然而,应当注意的是,一些实施例可以包括一个或多个可移动bs,为了测量距离和确定定位,可以使用与ue相同的方式来处理所述可移动bs。
[0285]
实际上,由于以下原因,所述连接图稀疏得多:(i)只有近距离ue可以彼此通信;(ii)更近距离的ue可能不需要建立sl;(iii)对sl的距离估计可能不可用或可能变得不可靠或过时。
[0286]
如果对于边缘(v,v
′
),满足(在1至7中),则一些实施例中将w
v,v
′
设置为1;否则,如果满足则一些实施例中将w
v,v
′
设置为0,以提供未知或“不确定”的提示:不意味着链路为los或nlos。应当注意的是,这些值以及本文中的其它值仅用于说明目的。在其它实施例中,可以使用其它值来指示los、nlos,或不确定的结果或未知的los/nlos状态。
[0287]
在一些实施例中,通过具有三态输出的nn来执行对具有这些标签选择的los标识的训练,由此通过本文其它地方描述的另一类型的差异检查来获得第三状态的标签。或者,可以通过不同的标签选择来形成回归问题。对于回归问题公式,考虑到未违反等式27或(1至7)的链路,在一些实施例中使用来自接收信号功率p的信息,或在使用相干器来检测距离的情况下使用相关性系数,为该链路分配nlos的概率:
[0288][0289]
等式31背后的逻辑非常直观。第e条链路的功率越大,其nlos的概率越低,并且因此值w
v,v
′
越小。尽管如此,应当记住的是,等式31的有效性基于以下假设:所有传输功率和自动增益控制(automatic gain control,agc)增益在连接图的所有顶点上均衡。还应该注意的是,等式31适用于w
v,v
′
的值越高表示nlos的概率越高的实施例,并非所有实施例中都
需要是这种情况。例如,可以根据等式31(w
v,v
′
值越低,表示nlos的概率越高),开发模拟方法。
[0290]
在构造或编译训练集时,在时间t处为建立训练样本(x
v,v
′
(t),w
v,v
′
(t)),以添加到训练集中。注意,在一些实施例中,训练集的构造是持续过程,通过对ue透明的众包过程来执行。这意味着,所有ue均有助于改进训练数据,而无需中断其通信。因此,与先前的指纹收集方法相比,不需要使用专家系统(uwb无线、超声、radar、lidar等)单独执行离线调查步骤。
[0291]
这些标签生成技术利用空间分集。在其它实施例中,也可以或替代地使用角分集。
[0292]
空间分集方法可以为通信网络中的一部分但不一定是全部链路准确地生成标签。例如,可能存在以下情况:两个节点或顶点之间的最小距离路径或环的一个或多个边缘上存在nlos,但不满足(1至7)中nlos假设的条件。尽管通过向连接图中每个最小距离环应用等式27可能会减少未标记链路的数量,但这无法解决以下事实问题:针对假设上述空间分集方法不产生关于los链路的任何线索。预计使用这种标签(而不使用los标签)训练的nn会导致预测器出现定义如下的较高检测错误率(p
md
)和较低误告警率(p
fa
):
[0293][0294][0295]
这两个量直接涉及机器学习中的两个重要性能度量,即召回率和精度。通常需要在p
md
和p
fa
之间实现更好的平衡,但实现更好的平衡也需要生成los线索和标签。根据本发明的另一个方面,在bs处估计aoa,并且利用余弦定律来生成los线索和标签。
[0296]
仅在bs处集中于角分集和aoa测量或估计并且使用ul通信的一个原因是,为了遵守以下重要的实际约束:相对于接收器的天线或天线阵列的宽边来测量或估计aoa,所述aoa是所述天线或阵列的本地坐标系(local coordinate system,lcs)的参考。尽管在已知正北方向的情况下,可以将局部角度转换为全球坐标系(global coordinate system,gcs),但是对于方向不断变化的移动ue,跟踪天线或阵列宽边和正北之间的时变偏移是可能的,不过可能错误率很高且需要进行密集处理。例如,理论上可以通过利用从ue处惯性测量单元(inertial measurement unit,imu)内的3d陀螺仪获得的读数来识别角位移,以及利用磁力计读数识别正北方向,从而跟踪此类偏移,但是ue内现成imu的此类读数的误差水平可能太高,以至于无法以足够的精度跟踪ue天线偏移来实现本文公开的角分集技术。除了这个实际的方面之外,多径环境中准确的aoa测量取决于具有大孔径的天线阵列的可用性,并且因此取决于大量的物理天线元件,这在ue处通常是不可行的。因此,本文主要考虑在bs处进行ul aoa估计或测量。在其它可以使用角分集技术的实施例中,角分集技术也可以或替代地应用于ue。
[0297]
图20示出了估计bs与两个ue之间的距离和aoa的框图。在bs处,距离估计是在sl、ul和dl上进行的,而aoa估计在ul上进行的。在本示例中,aoa估计包括角和
[0298]
如图20左侧所示,ue
2-bs和ue
1-ue2链路是los,而ue
1-bs链路是nlos。图20中间的图示出了对应于左图所示bs和ue的连接图,并且带有范围和角度信息标记。在图20的右边,利用d
01
,d
12
,θ,可以对两个三角形abc和abd进行可视化。
[0299]
余弦定律定义了图20中间的图上所述三角形abc的边和角之间的数学关系如下:
[0300][0301]
其中,θ是三角形两边之间的夹角。在图20中间的图所示的连接图中,d
a,b
=τ
a,b
·cem
,其中τ
a,b
表示距离估计a,b∈{0,1,2},c
em
表示电磁波传播速度,且所述bs在本示例中索引为0。此外,其中和是相对于所述bs天线阵列的宽边的估计ul aoa。给定d
01
,d
12
和θ的信息,通过图20的右图中的边ad和ac可能可以充分说明等式33中的两种可能性。实际上,sl的物理距离通常在几米或更短的量级,而ul/dl的物理距离可以在几百米的范围内。以符号表示法表示,|sl|<<min(|ul|,|dl|)。这意味着|ad|≈|ac|。因此,是一种合理的近似法。
[0302]
当以无限精度测量距离和aoa时,否则,由于以下原因中的一个或两个,实际上往往是后一种情况:由于带宽限制和天线阵列的有限长度,永远无法准确地测量距离和aoa;图20中的边ab和边ac中的任一条边上的nlos均导致相应的距离估计出现偏差。
[0303]
从实际的角度来看,与上述带宽或孔径限制相比,nlos引起的差异大得多。这种差异为提供有关所述los状态或链路性质的线索奠定了基础。例如,如果则可以推断:
[0304]
ab/ac是nlos/los,或
[0305]
ab/ac是los/nlos,或
[0306]
ab/ac是nlos/nlos,但是具有不相等的nlos偏差。
[0307]
或者,如果则可以推断:
[0308]
ab/ac是los/los,或
[0309]
ab/ac是nlos/nlos,但是具有相等的nlos偏差。
[0310]
两个独立链路上的nlos偏差是独立的随机变量,因此nlos链路具有相等的偏差是高度不可能的。这构成了以下假设测试标准的基础:
[0311][0312]
虽然这些标准是基于sl是los链路的假设,但这是一个经常能够满足的假设,至少sl通信发生于近距离ue之间这一点可以确保其置信度。为了潜在地提高关于满足sl是los这一假设的置信度,在一些实施例中,仅将接收功率高于置信度阈值的sl添加到连接图。
[0313]
为了生成标签,一些实施例中使用连接图来定位ue和bs之间的所有三角形连接路径,但是如果bs具有固定位置,则可能排除bs间三角形。在连接图中可以找到两种不同类型的三角形连接路径,如图21a和图21b中的示例所示。图21a中所示的第一种类型的三角形连接图位于两个固定bs和一个ue之间,并且图21b中所示的第二种类型的路径位于一个bs和两个ue之间,上文参考图20进行了详细讨论。不在固定bs之间执行距离估计或aoa估计,因为它们的已知位置和阵列方向提供了它们的距离和aoa,就好像已经执行虚拟距离测量和aoa测量一样。在这种情况下,尽管将ue连接到所述两个bs的链路之间的角度(以θ
12
表示)不是直接测量的,仍可以根据θ
12
=π-θ
01-θ
02-η
1-η2,从aoa测量θ
01
和θ
02
以及固定bs的天线方向
η1和η2估计所述角度。这些信息和所述bs间链路可能是los的事实可以用于等式34中,以评估los的存在与否。类型(a)路径预计会产生更准确的los标签,而类型(b)路径依赖于具有los sl的假设,可以对此假设执行等式34中的假设测试。所述两种类型(a)和(b)之间的唯一显著差异在于:类型(b)中关于sl的los假设在类型(a)中被替换为bs之间的“虚拟”los链路;在sl链路显著短于所述ue-bs链路的情况下,用于等式33的上述近似法可能不适用,具体取决于类型(a)中所述bs之间的距离。
[0314]
为了潜在地提高类型(b)中sl确实为los的置信度,可以通过移除对应于接收功率低于阈值p0的sl的边缘来对所述连接图进行修剪。这是一个具有以下等式给出的一组边缘的图:
[0315][0316]
其中,e由上述等式24给出。通过此类修剪,仅近距离连接参与建立三角形连接路径,这增加了sl上los的所述概率。
[0317]
为了减少由于“不确定”空间分集标签而可能保留nlos标记产生的不确定性,例如以上示例中的w
v,v
′
=0,可以应用以下逻辑:如果ul/dl边缘(v,v
′
)∈e
′
已经标记为nlos链路,其中在以上示例中w
v,v
′
=1,则将其排除在进一步考虑范围之外。否则,对(v,v
′
)使用等式34进行所述假设测试。然而,应该理解的是,空间分集技术和角分集技术不彼此依赖。尽管两种技术都基于闭合连接路径,但是这些技术可以彼此独立地应用,而不一定要组合应用。
[0318]
连接图中的相同边缘可以是很多三角形的一条边,并且等式34的评估为取决于阈值的判决,根据等式34一个边缘可以既标识为los,又标识为nlos。其中,表示边缘(v,v
′
)被标识为los的次数,表示不确定的次数,而表示以v,v
′
作为一条边的连接图三角形的数量,然后在一些实施例中根据和进行以下投票:
[0319][0320]
其中,w
v,v
′
=-1表示los,w
v,v
′
=0反映该链接的不确定性。然而,用这种标记数据训练nn仍然可以产生一种模型,所述模型可以用于预测训练数据中具有不确定性标签的信道的标签。等式36表示一个实施例,并且在另一个实施例中所述等式条件被分配给w
v,v
′
=0。
[0321]
上文和本文其它地方描述了涉及距离和/或角度测量或估计的各实施例。ue之间的距离测量或估计不必仅限于射频(radio frequency,rf)测量。也可采用超声系统、雷达测距、激光距离估计和视觉/照相机处理等其它测距技术或作为替代,以便测量或估计距离。只要ue之间的距离估计可用,就可以创建los/nlos标签用于训练或以其它方式开发模型。对于ue和bs之间的距离估计或测量以及角度估计或测量,情况同样如此。
[0322]
一些实施例考虑了时空信息。在移动蜂窝网络中,连接随时间变化。为了根据本文所公开的连接生成或收集标记数据,可以优选地定期在所述全连接图中添加或清除边缘。例如,参考图22,其中示出了具有移动ue的另一示例性无线通信网络的框图以及连接图的简化视图;
[0323]
图22中的2200处示出的所述示例性无线通信网络包括以gnb为例示出的bs 2202及两个ue。在所示的示例中,ue1固定在位置2210处,ue2随时间在位置2212、2214和2216之间移动。所述ue的运行环境包括反射器2230形式的障碍物和遮蔽障碍物2240。图22以与图20中相同的方式示出了链路。
[0324]
2200处的网络框图示出了所述bs 2202、所述固定ue1和所述移动ue2之间的ul/dl/sl距离估计;图22右上角示出了在时间t1,t2,t3处的简化连接图;图22右下角示出了简化的时空连接图。当可以提供位移时,可以生成时空连接图。
[0325]
如图22中的2200处以及右上角的所述连接图所示,如果ue改变位置,则所述连接图中的边缘发生变化或“过期”。可以仅ue知道其小区内和/或波束内的移动性。例如,在bs处跟踪ue是否已经移动可以涉及监视从该ue接收的信号的多普勒频移,在所述ue-bs链路是nlos时所述多普勒频移是错误的。因此,在一些实施例中,ue将它们的移动通过信令发送至维护连接图的bs和/或另一组件,使得可以相应地更新所述连接图。或者,如果维护连接图的bs或另一组件知道或能够估计或预测ue在某个时间间隔内的移动量,则不必像在其它实施例中那样快速地从连接图中移除边缘,从而可以利用时空分集。在连接图中维护边缘而不是在ue移动之后移除边缘的时间间隔可以取决于很多因素,例如所述ue的速度、所述ue上是否存在加速或突然转向等。例如,作为一个大致的准则,时空分集的移动时间间隔预计是秒量级的,而不是分钟或小时量级的。
[0326]
例如,如果ue是车辆或与车辆关联,则可以通过imu中的惯性传感器或轮式系统中的里程计等设备来跟踪ue的位移。一些imu由微机电传感器构成,用于测量电容的变化,以记录三个正交方向上终端的线加速度和角速度。出于连接的目的,我们感兴趣的是了解位移,并且仅ue v的3d加速度可用于推导位移,所述加速度可以表示为矢量
[0327][0328]
其中,c
em
表示电磁波传播速度。
[0329]
以这种方式获得或维护连接图以用于在ue移动之后保留边缘,所述连接图可以比纯空间连接图更密集或稀疏得多,从而潜在地提供更多信息以严格限制等式28等约束的边界。通过将图22中右上角三个独立空间连接图中的任何一个与图22中右下角的时空连接图进行比较,显而易见的是利用时空信息的连接图的密度更高;其中,所述时空连接图包括与ue2的所有三个位置对应的节点以及与所有这些位置关联的边缘,而不是只包括一个节点以及与ue2的一个位置的关联的边缘。
[0330]
连接图中的这种更高密度可以增加生成更准确的nlos/los训练标签的可能性,和/或为更多链路生成决定性或确定性标签的可能性。ue可以定期和/或在ue移动特定距离之后,向bs、定位服务器和/或维护所有ue的连接图的另一组件传输δτv(t,t δt)位移。这些位移可以视为虚拟距离估计,就好像在不同时间在多个不同位置从一个ue收集的所述信息是在一个快照中的那些位置从多个ue收集的一样,并且所述信息可以用于使连接图显示更多连接、更密集或降低稀疏性。
[0331]
应当注意的是,在连接图中根据位移进行更新和保留边缘可以作为其它连接图更新的补充,但不能完全取而代之。例如,由于以下原因,加速度估计有噪声且不准确:
[0332][0333]
其中,是ue的地面真值加速度,并且nv(t)是加性噪声项。在这种情况下,等式37中的噪声二重积分使所述估计的位移持续偏离实际位移。因此,ue还可以向定位服务器或维护连接图的其它组件发送“位移标志”或其它指示,以通过信令告知自从上次更新以来已进行了足够的移动,以保证更新sl距离估计,而不是从所述ue获取更多基于位置的更新。相反,ue可以直接停止发送位移信息,并且在以下情况下恢复确定并发送距离估计:已发送一定数量的位移更新;距最近一次距离估计起经过了一定的时间;和/或所述ue已经移动超过一定距离。这些条件也是可以触发由ue发送位移标志的条件示例。还应当理解的是,发送位移标志和/或以其它方式发起新的距离估计可以由通信网络中的一个或多个其它组件来执行,而不仅是由ue来执行。
[0334]
接着说明训练,一些实施例中使用可以持续增加的训练集来训练nn,一些实施例中由定位服务器来执行所述训练。所述训练集可以包含往返不同bs的ul/dl的数据以及不同ue之间的sl的数据。这意味着可以训练单个nn,而无需具有若干nn。如果目标是仅在ul和dl中预测los/nlos,则可以每个bs具有一个nn。然而,为了同时预测sl中的los/nlos,为每个ue开发nn的问题在计算上变得具有挑战性。
[0335]
利用nlos、los以及至少如上所述不明确或未知状态的三态标签,所述los标识问题可以视为分类问题。为了能够实现所述分类,一些实施例中将标签转换为如下所示的“独热”或单个二进制“1”值编码的表示:
[0336]
w=1
→
[1,0,0]
[0337]
w=0
→
[0,1,0]
[0338]
w=-1
→
[0,0,1]
ꢀꢀꢀ
39
[0339]
这仅仅是一个示例,在其它实施例中可以应用其它编码或标记。
[0340]
图23是一个实施例提供的示例性nn的示意图。图23中的示例性nn是前馈全连接nn(fully connected nn,fcnn),具有几个层,用于将左侧的输入转换为右侧的三态输出。在图23中,神经元以环示出,分支以线条示出,各个层按列排列。尽管图23所示的前馈fcnn可以使用收集的训练数据来训练,并用于预测链路的los/nlos状态,但这仅仅是一个说明性示例。在其它实施例中可以使用其它nn,例如卷积nn(convolutional nn,cnn)、循环nn(recurrent nn,rnn)等。本发明不限于任何特定类型的nn。
[0341]
考虑图23所示的示例性nn,在一些实施例中,对所述nn的所述输入是信道数据的互协方差张量x,所述互协方差张量被矢量化为长矢量x
l
←
vec(x
l
)以用于训练。如本文其它地方所详述,训练样本的收集可以利用空间分集、角分集和/或时间分集。为上述训练数据生成标签的标签标准可以总结如下:
[0342][0343]
为连接图的每个边缘(v,v
′
)∈e生成训练样本(x
v,v
′
(t),w
v,v
′
(t)),以构建跨时空
的训练集并且在一些实施例中根据独热编码对标签进行编码,例如用于训练图23所示的示例性nn。
[0344]
在一些实施例中,将所述训练集中的数据提供给损耗函数为二元交叉熵的nn
[0345][0346]
其中,为所述nn的第p个输出,并且w表示权重张量;请勿将所述权重张量与所述fcnn所有层的标签w
l
混淆,在一些实施例中,通过以下最小化公式学习所述权重张量
[0347][0348]
注意,为了明确定义等式40,输出例如,如果向所述输出层应用softmax激活,则满足该约束条件。
[0349]
一旦所述模型经过训练,就可以用于推断链路是los还是nlos。在一些实施例中,这涉及应用与训练数据以获得x所执行的相同预处理方式,观察ul、dl或sl中的新信道以获得h,然后找出
[0350][0351]
其中,表示所述3态nn的第j个输出;表示对信道张量为x的链路的nlos假设;表示对信道张量为x的链路的los假设;nan是一个符号,表示信道张量为x的链路的不确定状态。
[0352]
预计由网络侧的强ai引擎来执行训练,而不是由电池驱动的ue来执行,但是可以由ue来执行推断,其中所述网络侧的强ai引擎具有连接到无限电源的大型处理单元。这在以下实施例中尤其实用:蜂窝芯片组带有单独的ai单元,所述ai单元可以快速和有效地执行推断,就像现在经常出现的情况一样。
[0353]
当涉及sl测量时,也可以优选基于ue的推断。如果ue使用nlos/los预测但自身不运行所述模型,则它们必须发送实况测量或者至少向通信网络的另一个组件发送指示观察到的信道数据的信令,以便运行所述模型来预测链路(v,v
′
)是los链路还是nlos链路:例如,一些实施例中使用的所述信道张量x
v,v
′
可以具有非常高的维度。因此,对于要在bs或其它网络组件上执行的sl推断,这可能相当耗费资源。
[0354]
尽管在一些实施例中也在ul中发送以建立连接图并生成训练数据,但应当注意的是,预计发生训练和再训练的频率比发生推断的频率低得多。因此,就通信资源的使用而言,更实际的方案可以是:一旦完成训练或重新训练,就将所述模型传输到ue。例如,可以在初始训练之后第一次向所有ue广播而不是单播由若干bs覆盖的地理区域的模型。对于随后的重新训练,可以将nn中的权重初始化为最近的最优配置,然后可以用与初始训练基本
management function,lmf)的示例性实现方式。
[0365]
los标识的主要目的是标识nlos链路并将它们从位置估计中排除。因此,一个需要考虑的重要问题是,在所述ue位置和均未知的情况下,可以如何使用一个ue v和另一个ue之间的los sl距离测量信息来进行定位确定。所提出的los标识方法的另一个应用是:利用关于链路是否为nlos的信息,提高该链路的稳健性以进行后续通信。例如,如果在sl的传输侧所述ue知道其与接收侧连接的链路大概率是nlos链路,则它可以调整其调制和编码方案(modulation and coding scheme,mcs)和/或传输功率等,以降低通信发生严重降级、需要重传等情况的可能性。
[0366]
在一些实施例中,根据在ul、dl和sl中执行的距离估计以及锚点的已知位置,使用协作定位进行ue位置确定。这与当前蜂窝系统中的定位方法不同,在蜂窝系统中,所述网络通过解决单独的优化问题来定位每个ue。相反,利用可用的sl信息,存在一个同时为很多ue进行位置估计的复杂问题。下文参考图24对此进行更详细的说明;图24示出了另一个示例性通信网络的框图以及协作ue定位的确定。
[0367]
所述示例性无线通信网络2400包括bs 2402、2404、2406和2408以及ue 2410、2412和2414,并且所述ue的运行环境包括障碍物2430、2432和2434。图24旨在说明,在识别nlos链路并将其从最终估计问题中移除之后,为三个ue进行协作定位或定位确定;所述三个ue在2d空间具有四个已知位置的bs锚点因此,图24中仅示出了los链路。
[0368]
ue的位置可以视为敏感信息,因此在一些实施例中,不是在ue处而是在定位服务器或其它网络设备处执行对ue的联合位置估计,以便保持位置信息的机密性。
[0369]
在最一般的情况下,所述定位问题的最大似然(maximum likelihood,ml)公式如下:
[0370][0371]
其中,在一些实施例中,从固定区域收集所述网络的每个快照的t个样本,以便解决所述估计问题。假设所述测量模型引起具有相似方差的高斯噪声,等式44则归结为最小均方误差(minimum mean squared error,mmse)问题。
[0372][0373]
这是定位领域中经常遇到的非凸优化问题。还存在其它方法可解决这个问题,例如使用消息传递算法。
[0374]
上文主要在通信网络中的元件如何运行和交互的情景下详细描述了各种实施例。图25示出了一个实施例提供的信令的信号流程图。例如,至少在训练的初始阶段,其它实施例可以包括类似的信令。
[0375]
在所述信号流程图2500中,训练阶段2510涉及两个ue(包括ue1和ue2)、gnb、lmf和ai引擎。所述gnb、所述lmf和所述ai引擎是网络侧组件,并且可以在网络设备中一起实现或者单独实现。尽管图25中仅示出了两个ue和一个gnb,以免所述附图中的内容拥挤,但是预
计训练期间的数据收集以及类似地通信网络的运行涉及多于两个ue和多于一个gnb。
[0376]
在2512处,向ue2传输来自ue1的参考信令,所述参考信令以示例的形式示为sl定位参考信号(positioning reference signal,prs)信令。根据此参考信令,在2514处,ue2估计sl距离和信道数据,并计算所示示例中的信道张量。ue2还向2516处所示的所述lmf传输信令。所述信令包括或以其它方式指示ue1的所述sl信道张量、所述sl距离估计和标识符id1。ue2还接收2518处所示的来自所述gnb的dl-prs参考信号,在2520处为来自所述gnb的所述dl估计距离和信道数据并计算信道张量,并在2522处向所述lmf传输信令;所述信令包括或以其它方式指示所述dl信道张量和所述dl距离估计,而且在一些实施例中包括所述gnb的标识符(未示出)。在所述附图中,2522处的所述传输标记为“ul/dl”,在具有ul/dl信道互易性的实施例中会出现这种情况。用于ue-bs对的dl信道张量和距离估计可以用于,也可以不用于相同ue-bs对之间的ul。
[0377]
还应当注意的是,所述ue1和/或所述gnb可以类似地接收参考信令,估计或计算一个或多个链路的距离、信道数据和信道张量,并向所述lmf传输信令。这在图25中未示出,以免所述附图更加拥挤。
[0378]
图25中的2524和2526处示出了所述ue向所述lmf传输的可选信令;所述可选信令指示基于imu的位移。
[0379]
2528处示出了所述lmf根据接收的信令生成连接图和标签。所述lmf通过信令向所述ai引擎发送训练数据集;所述训练数据集包括或以其它方式指示信道张量和生成的标签,并且用于在2530处训练基于nn的模型。在2532处,通过信令向所述lmf发送nn权重。在所示实施例中,在2534处,还通过信令向ue2发送所述nn权重,或者在重新训练的情况下至少通过信令发送已改变的权重,并且可以向所有ue进行广播。应当注意的是,并非所有实施例都涉及在ue处执行推断,因此并非在所有实施例中都需要通过信令向ue发送nn权重。
[0380]
在运行阶段或所示示例的阶段2540,在ue2处执行推断。ue2从ue1接收sl-prs信令2542,并在2544处根据所述接收的信令执行sl nlos预测。尽管在2544处为了避免所述附图更加拥挤而未明确示出,但ue2可以根据在2542处接收的所述参考信令来估计信道数据,并且根据所述信道数据计算用于输入到nn的信道张量。类似地,在2548处,ue2可以根据从所述gnb接收的prs信令2546执行dl nlos预测。
[0381]
图25中的2550处还示出了从ue2向所述lmf发送的可选信令。2550处所示信令包括或以其它方式指示ue2与之具有los链路的ue和/或bs,例如图25中的所述ue1和/或所述gnb。所述信令以示例的方式示为包括los邻居id,但是也有可能存在其它形式的信令。
[0382]
2550处所示信令使得所述lmf可以对连接图进行修剪,如2556处所示。并非所有实施例中,2558处所示定位确定或位置估计都需要依赖于2556处的图修剪。
[0383]
可以响应于各种条件中的任一个发起重新训练,2552和2554处示出了可以发起重新训练的两个信令示例。如上所示,提供位移更新的ue可以通过信令发送位移标志。作为另一个示例,所述lmf通过信令向所述ai引擎发送图25所示的位移标志2552。可以在lmf或另一组件处而不在ue处或至少不仅在ue处,做出停止或暂停位移更新并重新训练模型的判决。
[0384]
在2554处通过信令发送新批次或更新批次的训练数据,也可以触发或替代地触发重新训练。在正常运行期间,可以在ue和bs之间通过信令发送与建立和/或维护链路关联的
prs信令,并且相应地可以持续进行训练数据收集和标签生成,使得无论何时执行重新训练,都有新的或更新的训练数据集可用。根据以下各项中的任何一项或多项,可由图25所示组件中的任何一个请求或发起或自动请求或发起重新训练:自上次训练或重新训练后经过的时间达到阈值;一个或多个ue移动超过阈值距离;错误检测率超出阈值;和/或各种其它因素中的任何一个等。
[0385]
重新训练可以按图25中2510处所示几乎相同的方式进行,但在重新训练的情况下,可以通过信令仅将已改变的nn权重及其在模型内的位置发送给2534处的ue和/或2532处的所述lmf。所述lmf等可以比较重新训练之前和之后的nn权重,以检测已改变的权重或改变超过阈值量的权重,以通过信令发送至ue。
[0386]
此外,也可以实现图25中的其它变体。例如,如果在网络侧通过图25所示的lmf等执行推断,则无需向ue分发nn权重。在运行阶段2540,ue可以向所述lmf传输sl和/或dl信道张量,然后所述lmf针对所述sl和/或dl执行nlos推断,并且将指示所述结果的信息通过信令发送回所述ue和/或将要使用所述结果的一个或多个其它组件。
[0387]
对于图25所示的信令,还有各种选项。例如,在一些实施例中,上行链路中的ue向lmf发送距离估计、信道张量并且可能发送位移。所述gnb等网络设备可以向每个ue通告所述ue是否要传送与此类信息关联的信令,并且在需要传送的情况下告知使用哪些通信资源。例如,这可以通过将物理下行链路控制信道(physical downlink control channel,pdcch)中的格式0下行链路控制信息(downlink control information,dci)的一部分分配给该任务来实现。每个ue可以使用公共和专用搜索空间来对dci进行解码,以确定它是否必须发送距离、张量和/或位移,以及使用哪些资源。
[0388]
当要向ue传输nn模型时,可以通过广播来完成此操作。为了广播所述模型(预计很少发生这种情况),ue需要能够确定它们能够在其上恢复所述模型的所述通信资源。考虑到nn模型预计包括数百万个参数这一事实,由于资源的限制,可能不会通过pdcch进行整个模型甚至是模型的一部分的模型传输。一种可能的选择是:使用dci的格式1来通知ue关于资源块(resource block,rb)等所述资源的信息,在此期间,符号将包含模型的权重,使得每个ue可以恢复所述模型。在一个实施例中,一旦可以在ue处提供所述模型,则在所述ue处执行推断。针对如2550处所示通过信令向所述lmf等一个或多个网络组件发送推断的los状态信息的情况,可以使用上行链路控制信息(uplink control information,uci)向所述网络组件声明携带该信息的ue的资源,例如rb和符号。
[0389]
上文详细描述了各实施例。如下文示例所述,所公开的特征可以各种方式中的任一种和/或各种子集或组合中的任一种来实现。图26示出了在实施例中由ue执行的方法的示例的流程图。
[0390]
所述示例性方法2600包括:在2602处,接收与第一ue和第二ue之间的直接无线通信链路关联的信令。在实施例中,与直接无线通信链路关联的信令可以是sl-prs信令或包括sl-prs信令,如图25中2512处的示例所示。所述示例性方法2600还包括:在2604处,向所述无线通信网络中的网络设备传输信令,所述信令包括或以其它方式指示所述第一ue和所述第二ue之间的距离估计。所述距离估计基于所述接收的信令。图25中的2516处通过示例示出了指示距离估计的信令。
[0391]
在2604处向其传输所述信令的所述网络设备可以是基站或其它网络设备等,所述
其它网络设备用于建立或维护连接图,或者以其它方式涉及训练或开发本文所公开的预测模型。所述网络设备可以实现图25所示的lmf等。在其它实施例中,在2604处向其传输所述信令的网络设备本身不直接涉及建立或维护连接图,或者以其它方式涉及训练或开发预测模型。ue可以在2604处向基站传输信令,所述基站继而将该信令中继到lmf等。
[0392]
在2604处传输的所述信令可以包括或以其它方式指示其它信息。例如,在一些实施例中,此类信令还指示根据所述接收的信令估计的信道数据。所述信道数据可以是或包括根据所述接收的信令估计的原始信道数据的转换版本。本文提及的信道张量表示此类转换的原始信道数据的一个示例。图25中的2516处所示的标识符是在2604处传输的所述信令中可以包含或以其它方式指示的其它信息的另一个示例。
[0393]
在一些实施例中,可以执行其它操作。2606处示出了一个示例,所述示例涉及在2604处传输指示距离估计的所述信令之后,向所述网络设备传输指示所述第一ue的位移的信令。图25中的2524和2526处通过示例以基于imu的位移的形式示出了此情况。
[0394]
对于多个链路、多个ue位置和/或预测模型的重新训练等,可以重复图26所示的这些操作,如2604和2602之间以及2606和2602之间的虚线返回箭头所示。
[0395]
一些实施例也涉及或替代地涉及接收与下行链路通信链路关联的信令,所述下行链路通信链路位于所述第一ue和所述无线通信网络的网络组件之间。从其中接收此类信令的所述网络组件可以但不必是在2604处向其传输所述信令的所述网络设备。例如,如图25所示,在2516处ue2可以向所述lmf传输指示距离估计的信令,但在2518处ue2从所述gnb接收与下行链路通信链路关联的信令。
[0396]
如图25中2522处通过示例所示,方法还可以包括向在2604处向其传输信令的所述网络设备传输其它信令,所述其它信令指示所述第一ue和所述网络组件之间的距离估计。所述第一ue和所述网络组件之间的所述距离估计基于与所述下行链路通信链路关联的所述接收的信令。所述其它信令还可以指示其它信息,例如根据与所述下行链路通信链路关联的所述接收的信令而估计的下行链路信道数据。此类下行链路信道数据的示例是原始信道数据的转换版本,根据与所述下行链路通信链路(例如下行链路信道传感器)关联的所述接收的信令估计所述转换版本。所述其它信令还可以指示所述网络组件和/或所述下行链路通信链路的标识符。
[0397]
在一些实施例中,在2608处,ue获取用于预测通信链路los状态的预测模型,并在ue处执行预测或推断。尽管ue本身可以训练或以其它方式开发预测模型,但是预计在网络侧开发预测模型。例如,ue可以在2608处接收指示预测模型的信令。如本文其它地方所述,所述预测模型部分地基于在2604处传输的所述信令中指示的所述距离估计,并且可以从在2604处向其传输所述信令的所述网络设备接收所述信令。
[0398]
应当注意的是,在图26中,故意未连接2606和2608,以说明在2608处获取预测模型的ue不必涉及通过向2604和2606处的网络设备传输信令来训练或以其它方式开发该预测模型。
[0399]
对于基于所述预测模型的预测或推断,在2610处ue接收与通信链路关联的信令。例如,所述信令可以是或包括信道张量。根据在2610处接收的信令,从所述预测模型获得所述通信链路的预测los状态。在2612处,传输包括预测或以其它方式指示所述预测的信令。例如,可以将所述预测信令从ue传输到lmf,以进行修剪。
[0400]
可以重复图26中所示的预测相关操作。例如,如2612和2610之间的虚线返回箭头所示,可以从多个链路的所述预测模型中获得预测。例如,在一些实施例中,可以使用由于重新训练而已经改变的权重子集来替换或更新所述预测模型,图26中通过2612和2608之间的虚线返回箭头示出了此情况。
[0401]
其它实施例可以包括以类似或不同顺序执行的更多、更少和/或不同的操作。
[0402]
图27示出了在一个实施例中由网络设备执行的方法示例的流程图。所述示例性方法2700旨在说明可以在各种类型的网络设备中的任一种上执行的方法。例如,考虑操作2702、2706和2708,其中涉及接收指示距离估计的信令、获取预测模型,以及传输指示所述预测模型的信令。这些操作可以在bs、lmf或ai引擎上执行。
[0403]
参考图25,如2516处所示,所述lmf可以接收指示距离估计的信令,所述距离估计与无线通信网络中第一ue和第二ue(特别是ue1和ue2)之间的直接无线通信链路关联。在本示例中,所述lmf还可以通过以所示示例中2532处所示权重的形式接收指示预测模型的信令,从所述ai引擎获取所述预测模型。如本文其它地方所述,所述预测模型用于预测所述无线通信网络中的通信链路的los状态。2534处所示的信令示出了指示所述预测模型的传输信令。这是图27中所示操作2702、2706和2708的一个示例性实现方式。
[0404]
转到图25中所示的gnb,ue2可以通过所述gnb向所述lmf传输信令,所述信令指示与ue1和ue2之间的sl关联的距离估计,并且类似地,可以通过所述gnb向ue2传输指示所述预测模型的信令。至少在这种意义上,所述gnb可以通过从ue2接收距离估计信令来执行所述操作2702,通过从所述lmf接收预测模型信令来执行所述操作2706,并且通过向ue2传输所述预测模型信令来执行操作2708。
[0405]
图25所示的ai引擎可以类似地接收信令,通过训练获取预测模型,并且传输指示所述预测模型的信令。
[0406]
因此,图27中所示的这些和/或其它操作不必限于任何特定类型的网络设备。在一些实施例中,诸如图27所示的那些操作之类的操作甚至可以在其它位置执行,包括在支持ue侧预测模型开发和/或推断等情况下在一个或多个ue处执行。
[0407]
图27中的2712处还示出了信令的传输,所述信令指示来自所述预测模型的预测。方法可以包括2708和/或2712。换言之,方法可以包括传输以下各项中的一项或多项:指示预测模型的信令,所述预测模型用于预测所述无线通信网络中通信链路的los状态;指示来自所述预测模型的预测和所述无线通信网络中一个或多个通信链路的los状态的信令。在任一情况下,所述预测模型部分地基于所述第一ue和所述第二ue之间的所述距离估计。
[0408]
如本文其它地方所述,在2702处接收的所述信令还可以指示其它信息,例如为所述直接无线通信链路估计的信道数据和/或标识符。在2710处接收的所述信令还可以或替代地指示信道数据,例如,要使用所述预测模型对其进行预测的通信链路的信道张量。
[0409]
方法可以包括其它操作。2704处示出了示例,所述示例包括接收指示所述ue的位移的信令,所述位移发生于所述第一ue确定在2702处为其接收信令的所述距离估计之后。如本文其它地方所述,此类位移估计可用于训练或以其它方式获取预测模型。
[0410]
尽管已经参考本发明的特定特征和实施例描述了本发明,但是明显可以在不脱离本发明的情况下制定本发明的各种修改和组合。因此,说明书和附图仅被视为所附权利要求书限定的对本发明的说明,并且预期覆盖落入本发明的范围内的任何和所有修改、变化、
组合或等同物。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
