技术特征:
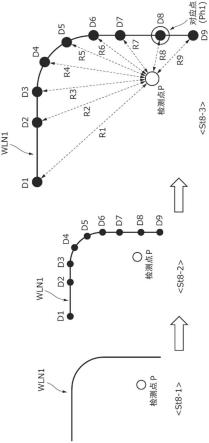
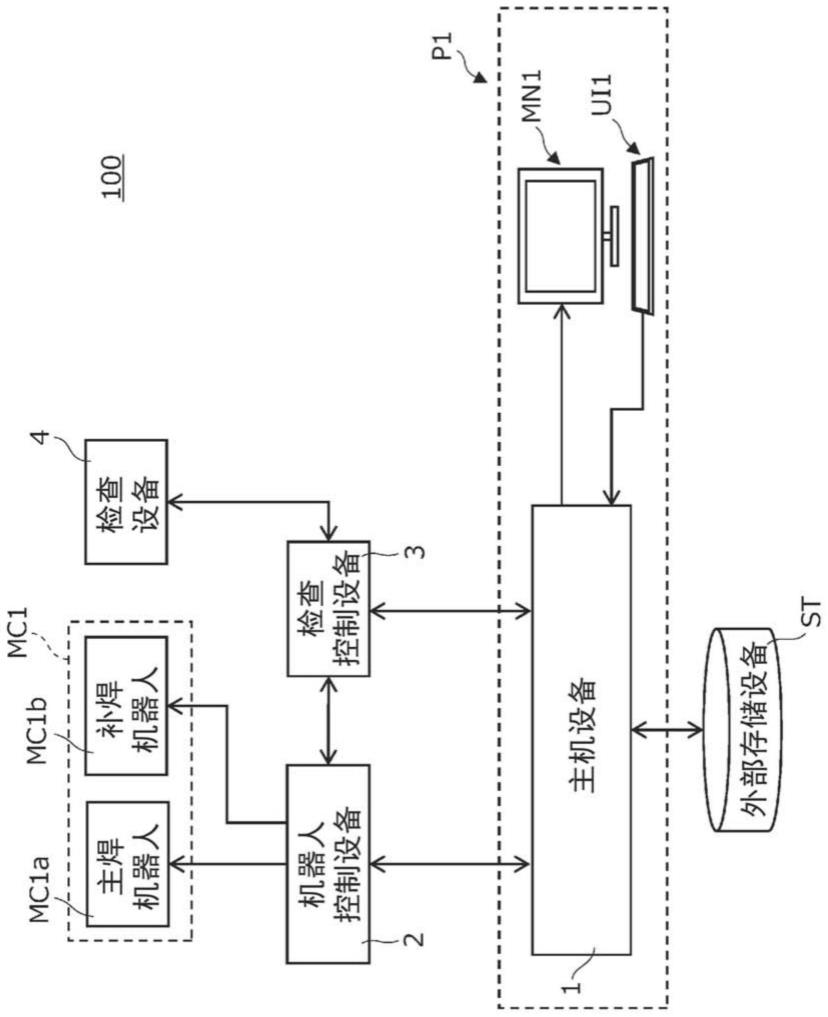
1.一种补焊设备,包括:获取单元,被配置为获取外观检查结果,所述外观检查结果包括关于由焊接机器人执行的主焊所产生的焊接工件的焊道的缺陷部分的位置的信息;以及机器人控制单元,被配置为在由所述焊接机器人执行的所述主焊的虚拟焊线上设置多个插补点,并且指示所述焊接机器人对与获取的缺陷部分的位置最接近的插补点执行补焊,所述虚拟焊线是基于用于执行所述主焊的主焊程序模拟的。2.根据权利要求1所述的补焊设备,还包括:补焊程序生成单元,基于所述外观检查结果生成用于执行补焊的补焊程序,所述补焊包括所述插补点的位置,其中,所述机器人控制单元根据所述补焊程序使所述焊接机器人对所述插补点执行补焊。3.根据权利要求1所述的补焊设备,其中,所述多个插补点中的每一个插补点与所述焊接机器人在每个预定时间的位置相对应地设置在所述虚拟焊线上。4.根据权利要求1所述的补焊设备,其中,所述多个插补点分别以预定间隔设置在所述虚拟焊线上。5.根据权利要求1所述的补焊设备,其中,在所述虚拟焊线具有一个或多个直线段和一个或多个弯曲段的情况下,所述弯曲段中的多个插补点之间的间隔设置为小于所述直线段中的多个插补点之间的间隔。6.根据权利要求1所述的补焊设备,其中,在所述虚拟焊线具有两个或更多个曲率不同的弯曲段的情况下,曲率大的弯曲段中的多个插补点之间的间隔设置为小于曲率小的弯曲段中的多个插补点之间的间隔。7.一种由补焊设备执行的补焊方法,所述补焊方法包括以下过程:获取外观检查结果,所述外观检查结果包括关于由焊接机器人执行的主焊所产生的焊接工件的焊道的缺陷部分的位置的信息;在由所述焊接机器人执行的所述主焊的虚拟焊线上设置多个插补点,所述虚拟焊线是基于用于执行所述主焊的主焊程序模拟的;以及指示所述焊接机器人对与获取的缺陷部分的位置最接近的插补点执行补焊。
技术总结
补焊设备包括:获取单元,被配置为获取外观检查结果,该外观检查结果包括关于由焊接机器人执行的主焊所产生的焊接工件的焊道的缺陷部分的位置的信息;以及机器人控制单元,被配置为在由焊接机器人执行的主焊的虚拟焊线上设置多个插补点,并且指示焊接机器人对与获取的缺陷部分的位置最接近的插补点执行补焊。该虚拟焊线是基于用于执行主焊的主焊程序模拟的。拟的。拟的。
技术研发人员:大熊克明
受保护的技术使用者:松下知识产权经营株式会社
技术研发日:2020.10.23
技术公布日:2022/7/13
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。