1.本发明涉及作业信息管理装置。
背景技术:
2.在专利文献1中公开了如下技术:通过使安装有作业机的拖拉机在田地内行驶,使作业机执行农作业,将作业机的机械信息、拖拉机的位置信息以及作业内容数据作为作业信息存储于远程的服务器。
3.专利文献1:日本特开2019-109791号公报
4.在专利文献1中,通过将拖拉机和作业机电连接,使拖拉机取得表示作业机的种类等的机械信息,并将其存储于拖拉机的存储器。
5.近年来,还提出通过将拖拉机和作业机无线连接从而由拖拉机取得作业机的机械信息的方法。
6.但是,为了在拖拉机与作业机之间实现数据通信,需要在拖拉机和作业机设置通信装置。另外,在使用旧型的作业机的情况下,还存在无法在作业机设置通信装置的情况。
7.因此,在很多情况下,在开始作业之前,拖拉机的操作人员将作业机的机械信息手动输入拖拉机,由此使作业机的机械信息存储于拖拉机的存储器。但是,在该方法中,由于每次更换作业机时都需要手动输入机械信息,所以存在其操作麻烦且忘记输入也容易产生之类的问题。
技术实现要素:
8.本发明的目的在于,提供一种能够利用新方法自动地推定通过作业机进行的作业的作业种类的作业信息管理装置。
9.本发明的一实施方式提供作业信息管理装置,包含:拖拉机侧信息取得部,从安装有多种作业机中的任一种的拖拉机取得包含上述拖拉机的每个时刻的位置信息以及上述拖拉机的每个时刻的运转信息在内的拖拉机侧信息;以及作业种类推定部,基于通过上述拖拉机侧信息取得部取得的上述拖拉机侧信息,推定通过安装于上述拖拉机的作业机进行的作业的作业种类。
10.在该结构中,能够自动地推定通过作业机进行的作业的作业种类。
11.在本发明的一实施方式中,上述作业种类推定部包含:将作业期间分割为多个单位期间,并在每个上述单位期间将在该单位期间进行的作业的作业种类推定为单位期间作业种类的各单位期间作业推定部,上述作业种类推定部构成为,在上述各单位期间作业种类中,基于推定出的作业种类的数量,推定上述作业期间的作业种类。
12.在本发明的一实施方式中,上述各单位期间作业推定部构成为,使用机器学习法推定上述各单位期间作业种类。
13.在本发明的一实施方式中,上述各单位期间作业推定部构成为,基于上述定位信息以及上述运转信息,在每个上述单位期间生成对机器学习模型的输入信息,使用生成的
输入信息和上述机器学习模型推定每个上述单位期间的作业种类。
14.在本发明的一实施方式中,上述驱动信息包含上述拖拉机的驱动源的转速和pto轴的转速,上述输入信息包含:上述拖拉机的移动轨迹的图样、上述拖拉机的车速的基本统计量的至少一个、上述驱动源的转速的基本统计量的至少一个、和上述pto轴的转速的基本统计量的至少一个。
15.在本发明的一实施方式中,上述运转信息至少包含:上述拖拉机的车速信息、与上述拖拉机的驱动源的驱动状态有关的驱动源信息、和与将上述驱动源的驱动力传递至上述作业机的传递机构的动作状态有关的传递机构信息。
16.本发明的一实施方式包含:基于通过上述拖拉机侧信息取得部取得的上述拖拉机侧信息,将规定的期间分类为作业期间和非作业期间的作业期间判定部,上述作业种类推定部构成为,在每个通过上述作业期间判定部判定的作业期间,推定通过安装于上述拖拉机的作业机进行的作业的作业种类。
17.在该结构中,能够自动地推定通过作业机进行的作业的作业种类。
18.在本发明的一实施方式中,上述运转信息至少包含:与上述拖拉机的驱动源的驱动状态有关的驱动源信息、和与将上述驱动源的驱动力传递至上述作业机的传递机构的动作状态有关的传递机构信息,上述作业期间判定部基于上述传递机构信息,或者基于上述传递机构信息以及上述驱动源信息,将上述规定的期间分类为作业期间和非作业期间。
19.本发明的一实施方式包含:提示用于输入通过上述作业机进行的作业种类的输入画面,并将在上述输入画面上输入的作业种类作为最终的作业种类取得的作业种类取得部,上述作业种类推定部通过推定上述作业种类来输出一个或多个作业种类候补,上述作业种类取得部构成为,以从由上述作业种类推定部输出的上述一个或多个作业种类候补中能够选择一个作业种类候补的方式,提示上述一个或多个作业种类候补。
20.在该结构中,由于能够缩减输入作业种类时的选项,所以能够减少输入作业种类时的工作。
21.在本发明的一实施方式中,还包含消耗量计算部,该消耗量计算部在上述最终的作业种类为消耗资材的播种作业、施肥作业以及药剂播撒作业中的任一作业的情况下,基于安装于上述拖拉机的作业机的重量的变化,计算上述资材的消耗量。
22.在本发明的一实施方式中,上述重量传感器是夹设于上述拖拉机与上述作业机之间来检测被上述拖拉机牵引的上述作业机的牵引力的测力传感器,上述消耗量计算部构成为,基于在作业开始时刻被上述拖拉机牵引的上述作业机的被检测出的牵引力与在作业结束时刻被上述拖拉机牵引的上述作业机的牵引力之差,计算上述资材的消耗量。
附图说明
23.图1是表示应用了本发明的一实施方式所涉及的作业机确定装置的作业管理系统的结构的示意图。
24.图2是表示拖拉机以及管理服务器的电气结构的框图。
25.图3是表示作业分类表的内容例的示意图。
26.图4是表示针对某用户的各用户拖拉机id表的内容例的示意图。
27.图5是表示针对某用户的某各用户作业信息表的内容例的示意图。
28.图6是表示针对某作业期间通过作业种类推定部执行的作业种类推定处理的顺序的流程图。
29.图7a是表示作业种类输入画面的一例的示意图。
30.图7b是表示在作业种类输入画面中显示有缩减下拉菜单的状态的示意图。
具体实施方式
31.以下,参照附图详细说明本发明的实施方式。
32.图1是表示应用了本发明的一实施方式所涉及的作业信息管理装置的作业管理系统的结构的示意图。
33.作业管理系统1包含拖拉机2、安装于拖拉机2的作业机3、用户终端4和管理服务器5。管理服务器5管理预先登记的用户的作业信息、或者使各用户输入作业信息的一部分、或者使各用户阅览作业信息。管理服务器5是作业信息管理装置的一例。管理服务器5设置于管理中心6内。拖拉机2能够经由通信网7和管理服务器5通信。
34.用户终端4是拥有拖拉机2的用户使用的终端。用户终端4能够经由通信网7和管理服务器5通信。
35.用户终端4由个人计算机(pc)构成,包含控制装置(pc主体)4a、显示器4b和鼠标、键盘等操作设备4c。控制装置4a包含cpu、存储器、硬盘等。在硬盘中,除os(操作程序)之外,还储存有用于阅览web页的浏览器(browser)等的程序、其他必要数据。
36.在拖拉机2可以安装多种作业机。对于安装于拖拉机2的作业机3,例如有播撒系作业机、耕耘系(包含耕起系、碎土系、整地系)作业机。对于播撒系作业机,有播种机、防除机(sprayer)、施肥机(broadcaster)等。对于耕耘系作业机,有耕耘机(rotary machine)、松土机(soiler)、棘状滚轮(cambridge roller)、割草机(mower)等。
37.拖拉机2具备利用定位卫星8对拖拉机2的位置进行定位的功能。拖拉机2将包含拖拉机id、每个时刻的位置信息和每个时刻的运转信息在内的拖拉机侧信息发送至管理服务器5。拖拉机id是用于识别拖拉机2的信息。拖拉机id也可以由拖拉机2的款式以及机号构成。
38.图2是表示拖拉机2以及管理服务器5的电气结构的框图。
39.拖拉机2包含拖拉机控制部10。拖拉机控制部10包含具备cpu以及存储器(易失性存储器、非易失性存储器等)11的微型计算机。拖拉机控制部10控制拖拉机2的动作(前进、后退、停止、转弯等动作)。拖拉机控制部10与用于控制拖拉机2的各部分的多个控制器(控制器类21)电连接。多个控制器包含控制发动机(驱动源)的转速等的发动机控制器、控制拖拉机2的车速的车速控制器、控制拖拉机2的前轮的转向角的转向操纵控制器、控制pto轴的旋转的pto轴控制器等。
40.拖拉机2具备用于切换动力向pto轴(动力传递轴)的传递/切断的pto离合器。pto轴控制器能够基于从拖拉机控制部10输入的控制信号切换pto离合器,从而经由pto轴旋转驱动作业机3,或者使作业机3停止。
41.在拖拉机控制部10还连接有位置信息计算部22、通信部23、显示部24、操作部25、存储部26等。
42.位置信息计算部22与卫星信号接收用天线27电连接。卫星信号接收用天线27接收
来自构成卫星定位系统的定位卫星8(参照图1)的信号。卫星定位系统例如是gnss(global navigation satellite system)。位置信息计算部22基于通过卫星信号接收用天线27接收到的定位信号计算拖拉机2(严格来说是卫星信号接收用天线27)的位置。具体而言,位置信息计算部22生成包含时刻信息和位置信息在内的定位信息。位置信息例如由纬度信息和经度信息构成。
43.通信部23是用于拖拉机控制部10经由通信网7和管理服务器5通信的通信接口。显示部24例如由液晶显示器构成。在操作部25设置有多个控制杆、开关等。
44.存储部26由非易失性存储器等存储设备构成。在存储部26设置有位置信息存储部31、运转信息存储部32等。
45.拖拉机控制部10包含信息取得处理部12。信息取得处理部12取得通过位置信息计算部22每隔规定时间计算出的位置信息,并将其存储于位置信息存储部31。另外,信息取得处理部12取得从拖拉机控制部10每隔规定时间给予的运转信息,并将其存储于运转信息存储部32。在运转信息中,包含车速、发动机的通断信息(以下称为“发动机通断信息”)、发动机转速、pto离合器的通断信息(以下称为“离合器通断信息”)、pto离合器的转速(以下称为“pto轴转速”)、发动机负荷率等。发动机负荷率例如是实际的燃料喷射量与无负荷燃料喷射量间的偏差相对于最大燃料喷射量与无负荷燃料喷射量间的偏差的比率。
46.而且,信息取得处理部12将存储于位置信息存储部31的每个时刻的位置信息以及存储于运转信息存储部32的每个时刻的运转信息,与拖拉机id一起在规定的时刻(例如在断开操作了电源键的时刻)发送至管理服务器5。以下,存在将向管理服务器5发送的“每个时刻的位置信息以及运转信息”称为“拖拉机侧信息”的情况。
47.管理服务器5具备服务器控制部40。服务器控制部40与通信部51、操作显示部52、操作部53、存储部54等连接。通信部51是用于服务器控制部40经由通信网7而与拖拉机2、用户终端4通信的通信接口。操作显示部52例如由触摸面板式显示器构成。操作部53例如包含键盘、鼠标等。存储部54由硬盘、非易失性存储器等存储设备构成。
48.在存储部54设置有时间序列信息存储部61、作业分类表62、各用户拖拉机id表63、各用户作业信息表64等。
49.在时间序列信息存储部61中,将从拖拉机控制部10接收到的拖拉机侧信息与从拖拉机控制部10接收到的拖拉机id建立关联地进行存储。
50.在作业分类表62存储有多种作业名。图3表示作业分类表62的内容例。在该实施方式中,农作业被分级地分类为大分类和中分类,在作业分类表62中,可以存储大分类的作业名和中分类的作业名。但是,也可能存在针对大分类的作业名不存在中分类的作业名的作业。关于这样的作业,仅存储大分类的作业名。
51.在大分类的作业名中,例如存在耕耘、施肥、播种、定植、药剂播撒、收获等。在耕耘所包含的中分类的作业名中,存在心土破碎、涂垄、耕起、整地、耙地、均平化、除草等。在施肥所包含的中分类的作业名中,存在基肥播撒、追肥等。
52.在各用户拖拉机id表63中,针对每个用户,存储该用户所拥有的拖拉机的拖拉机id。图4表示针对某用户u1的各用户拖拉机id表63的内容例。在图4的例子中,用户u1拥有三台拖拉机t1、t2、t3。
53.在各用户作业信息表64中,针对每个用户,存储使用该用户所拥有的拖拉机进行
的作业的作业信息。图5表示针对某用户u1的各用户作业信息表64的内容例。在图5的例子中,作业信息包含拖拉机id、作业年月日(年月日)、作业开始时刻(开始时刻)、作业结束时刻(结束时刻)、通过后述作业种类推定部44推定的作业种类(推定)、如后述那样通过用户输入的最终的作业种类(输入)等。在通过作业种类推定部44推定的作业种类(推定)中,存在大分类名和中分类名。
54.服务器控制部40包含具备cpu以及存储器(易失性存储器、非易失性存储器等)41的微型计算机。服务器控制部40包含信息取得部42、作业期间判定部43、作业种类推定部44、作业信息存储处理部45和作业种类取得部46。信息取得部42是本发明的“拖拉机侧信息取得部”的一例。
55.信息取得部42在从拖拉机2接收到拖拉机侧信息和拖拉机id时,将接收到的拖拉机侧信息与接收到的拖拉机id建立关联并存储于时间序列信息存储部61。为了便于说明,将在某一日某用户拥有的拖拉机2的存储部26(31、32)中存储的拖拉机侧信息称为“处理对象的时间序列信息”。在时间序列信息存储部61存储有处理对象的时间序列信息。
56.作业期间判定部43将处理对象的时间序列信息中的从最旧的时刻至最新的时刻为止的期间(处理对象期间)分类为作业期间和非作业期间。
57.例如,首先,作业期间判定部43基于处理对象的时间序列信息所包含的发动机通断信息以及离合器通断信息,按照每个时刻推定拖拉机2是作业状态还是非作业状态。更具体而言,作业期间判定部43在处理对象期间内的每个时刻,推定是否满足发动机通断信息是接通且离合器通断信息是接通这一作业/非作业判定条件。
58.如果在某判定对象时刻,满足作业/非作业判定条件,则作业期间判定部43判定为在该时刻拖拉机2是作业状态,如果不满足作业/非作业推定条件,则作业期间判定部43判定为在该时刻拖拉机2是非作业状态。然后,基于每个时刻的作业状态判定结果,将处理对象期间分类为作业期间和非作业期间。
59.其中,作业期间判定部43也可以仅将离合器通断信息是接通这一条件作为作业/非作业推定条件来使用。
60.作业种类推定部44在每个通过作业期间判定部43判定出的作业期间,基于通过信息取得部42取得的拖拉机信息,进行用于推定通过安装于拖拉机2的作业机3进行的作业的作业种类的处理,由此输出一个或多个作业种类候补。作业种类推定部44包含各单位期间作业推定部44a和作业种类候补输出部44b。
61.各单位期间作业推定部44a将作业期间分割为多个单位期间,在每个单位期间,推定在该单位期间进行的作业的作业种类,来作为各单位期间作业种类。在该实施方式中,单位期间被设定为五分钟。另外,在该实施方式中,各单位期间作业推定部44a使用机器学习法(机器学习模型)推定各单位期间作业种类。在机器学习法中,例如包含支持向量机、随机森林、神经网络、逻辑回归、拓扑数据分析等。
62.作业种类候补输出部44b基于通过各单位期间作业推定部44推定出的各单位期间作业种类,输出一个或多个作业种类候补。
63.作业信息存储处理部45在每个作业期间将从作业种类候补输出部44b输出的一个或多个作业种类候补,作为通过作业种类推定部44推定出的作业种类(推定),存储于各用户作业信息表64。此时,作业信息存储处理部45将从作业种类候补输出部44b输出的作业种
类候补,与拖拉机id、年月日、开始时刻、结束时刻等建立关联并存储于各用户作业信息表64。
64.另外,作业信息存储处理部45在将从作业种类候补输出部44b输出的作业种类候补存储于各用户作业信息表64之后,通过作业种类取得部46取得了作业种类时,将该作业种类作为最终的作业种类(输入)存储于各用户作业信息表64。
65.作业种类取得部46提示用于输入通过安装于拖拉机2的作业机3进行的作业种类的输入画面,取得在输入画面上输入的作业种类,来作为最终的作业种类。作业种类取得部46构成为,以能够从由作业种类推定部44输出的多个作业种类候补之中选择一个作业种类候补的方式,提示多个作业种类候补。
66.图6是表示针对某作业期间(以下称为关注作业期间)通过作业种类推定部44执行的作业种类推定处理的顺序的流程图。
67.在通过作业种类推定部44执行的作业种类推定处理中,包含通过各单位期间作业推定部44a执行的推定处理(步骤s1~s5)、和通过作业种类候补输出部44b执行的输出处理(步骤s6)。
68.参照图6,各单位期间作业推定部44a将关注作业期间的最初五分钟的期间设定为关注单位期间(步骤s1)。
69.接下来,各单位期间作业推定部44a基于关注单位期间内的拖拉机侧信息,生成对机器学习模型的输入信息(步骤s2)。
70.输入信息包含:关注单位期间中的拖拉机2的移动轨迹的图样、关注单位期间中的拖拉机2的车速的基本统计量的至少一个、关注单位期间中的发动机转速的基本统计量的至少一个、和关注单位期间中的pto轴转速的基本统计量的至少一个。基本统计量包含合计、平均、标准偏差、最小值、最大值、中央值以及最频值。关注单位期间中的拖拉机2的移动轨迹的图样是预先确定的多个移动轨迹图样之中最接近关注单位期间中的移动轨迹图样的图样。
71.输入信息例如也可以包含拖拉机2的移动轨迹的图样、车速的平均值、标准偏差、最大值以及中央值、发动机转速的平均值、标准偏差、最大值以及中央值、和pto轴转速的平均值、标准偏差、最大值以及中央值。
72.输入信息也可以还包含发动机负荷率的基本统计量的至少一个。例如,输入信息也可以包含发动机负荷率的平均值、标准偏差、最大值以及中央值。
73.接下来,各单位期间作业推定部44a使用在步骤s2中生成的输入信息和机器学习模型,推定关注单位期间的作业种类,将推定结果存储于存储器41(步骤s3)。在该实施方式中,各单位期间作业推定部44a推定一种作业种类来作为关注单位期间的作业种类。
74.接下来,各单位期间作业推定部44a判别在关注作业期间中的时间上比关注单位期间晚(新)的期间中是否残留有五分钟以上的期间(步骤s4)。在残留有五分钟以上的期间的情况下(步骤s4:是),将当前的关注作业期间的下一五分钟期间设定为新的关注作业期间(步骤s5),之后返回至步骤s2。由此,对新的关注作业期间执行步骤s2~s4的处理。
75.在步骤s4中,判别为在关注作业期间中的时间上比关注单位期间晚的期间中未残留有五分钟以上的期间的情况下(步骤s4:否),各单位期间作业推定部44a移至步骤s6。
76.在步骤s6中,作业种类候补输出部44b基于关注作业区间内的每五分钟的单位期
间的作业种类推定结果,选择多个作业种类候补并输出。例如,作业种类候补输出部44b在关注作业期间内的每个单位期间的作业种类中,基于推定出的作业种类的数量,选择多个作业种类候补并输出。具体而言,作业种类候补输出部44b在关注作业期间内的每个单位期间的作业种类之中选择数量多的上位的多个(在该例中为上位的3个)作业种类,来作为关注作业期间的作业种类候补并输出。
77.例如,在关注作业期间内包含十个单位期间,在十个单位期间之中,针对四个单位期间的作业种类被推定为耕耘(耙地),针对三个单位期间的作业种类被判别为耕耘(耕起),针对两个单位期间的作业种类被判别为耕耘(整地),针对一个单位期间的作业种类被判别为耕耘(除草)的情况下,耕耘(耙地)、耕耘(耕起)和耕耘(整地)作为作业种类候补被输出。
78.这样,在本实施方式中,由于在每个单位期间推定作业种类之后,通过多数决定逻辑推定作业种类,所以具有以下那样的优点。
79.例如,在对作业期间整体使用机器学习法推定作业种类并将该推定结果决定为最终的作业种类的情况下,在存在与实际进行的作业种类相似的作业种类的情况下,因机器学习法的模糊性而有可能推定与实际进行的作业不同的作业种类。但是,在本实施方式中,认为即便在存在与实际进行的作业种类相似的作业种类的情况下,在作业期间内的多个单位期间每个的推定结果中,被推定为实际进行的作业种类的数量变得比被推定为与实际进行的作业不同的作业种类的数量的概率也提高。因此,在本实施方式中,作业种类的推定精度提高。
80.另外,若在作业期间内,因某种原因而暂时进行不适合实际应进行的作业那样的拖拉机移动,则在作业期间内的多个单位期间的一部分单位期间中,有时将与实际不同的作业种类推定为该单位期间的作业种类。但是,即便在这样的情况下,由于在本实施方式中通过多数决定逻辑决定为最终的作业种类,所以能够推定实际的作业种类。
81.若这样输出针对关注作业期间的作业种类候补,则作业信息存储处理部45将所输出的作业种类候补(大分类、中分类),与针对该关注作业期间的拖拉机id、年月日、开始时刻、结束时刻等建立关联并存储于各用户作业信息表64(参照图5)。通过反复进行这样的处理,将针对处理对象期间内的全部作业期间的作业种类候补存储于各用户作业信息表64(参照图5)。
82.以下,详细说明作业种类取得部46的动作。
83.用户通过操作用户终端4,打开管理服务器5所提供的主页,进行登录操作,由此能够取得自己专用的web页。然后,用户能够在自己专用的web页上,阅览用于对用户使用拖拉机2进行的作业输入作业种类的作业种类输入画面。
84.具体而言,若用户在自己专用的web页上进行用于取得针对用户所进行的规定的作业(以下称为“关注作业”)的作业种类输入画面的操作,则作业种类取得部46生成包含针对关注作业的作业种类输入画面的web页,并提供给用户终端4。由此,在用户终端4显示例如图7a所示那样的作业种类输入画面70。
85.在作业种类输入画面70显示有:具有关注作业的作业日、作业开始时刻、作业结束时刻、作业种类等项目的项目提示部71、和ok按钮72。在关注作业的作业日、作业开始时刻以及作业结束时刻的项目中,显示有在管理服务器5侧确定的作业日、作业开始时刻以及作
业结束时刻。
86.在作业种类的项目中,可选择地显示有针对关注作业从作业种类推定部44输出的一个或多个作业种类候补。例如,在针对关注作业从作业种类推定部44输出的作业种类候补是“耕耘(耙地)”、“耕耘(耕起)”以及“耕耘(整地)”这三个的情况下,如图7a所示,在作业种类的项目中,显示有其中的一个大分类名或者其中的一个中分类名。在该例中,显示了与关注作业对应的多个作业种类候补之中的一个大项目即“耕耘”。
87.然后,若点击作业种类的项目,则如图7b所示,在最初显示于作业种类的项目的作业名的项目之下,显示缩减下拉菜单73,该缩减下拉菜单73包含与关注作业对应的多个作业种类候补之中的除该作业名以外的作业名(包含大分类的作业名以及中分类的作业名)每一个和“其他”。用户从该缩减下拉菜单73中选择与关注作业对应的多个作业种类候补所包含的大分类名以及中分类名之中的任一个或“其他”。
88.在从缩减下拉菜单73中选择了一个作业名的情况下,该作业名显示于作业种类的项目中。若在该状态下点击ok按钮72,则从缩减下拉菜单73中被选择的作业名从用户终端4被送至管理服务器5。若管理服务器5(作业信息存储处理部45)接收来自用户终端4的作业名,则将接收到的作业名作为最终的作业种类(输入)存储于各用户作业信息表64的与关注作业对应的作业信息存储区域中(参照图5)。
89.其中,在从缩减下拉菜单73中选择了“其他”的情况下,由于显示用于从全部作业种类之中选择一个作业种类的通用下拉菜单(省略图示),因此用户从通用下拉菜单中选择一个作业种类。
90.在本实施方式中,在用户输入作业种类时,能够缩减选项,因此能够减轻用户的工作。
91.以上,说明了本发明的实施方式,但本发明也能进一步通过其他方式来实施。
92.例如,在上述实施方式中,作业种类如大分类以及中分类那样被分级地分类,但也可以不分级地分类。
93.另外,在上述实施方式中,以能够从多个作业种类候补之中选择实际进行的作业种类的方式,显示缩减下拉菜单73。但是,用于使用户从多个作业种类候补之中选择实际进行的作业种类的显示形式,也可以是除下拉菜单以外的显示形式。例如,也可以以列表显示多个作业种类候补,并以弹窗形式等来显示用于从该列表之中选择一个的作业种类选择列表。
94.在该情况下,既可以仅将多个作业种类候补所包含的全部的大分类名以列表显示,也可以仅将多个作业种类候补所包含的全部的中分类名以列表显示,还可以将多个作业种类候补所包含的大分类名以及中分类名的组合以列表显示。另外,也可以在打开下拉菜单时显示这样的作业种类选择列表。
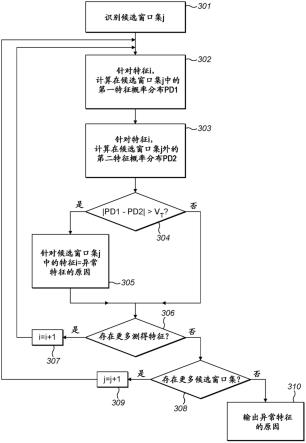
95.另外,在上述实施方式中,各单位期间作业推定部44a推定一种作业种类来作为关注单位期间的作业种类。然而,各单位期间作业推定部44a也可以求出一个或多个作业种类候补(以下称为“第一作业种类候补”)和该第一作业种类候补为关注单位期间的作业种类的概率,来作为关注单位期间的作业种类。在如上述那样在作业种类的推定中使用机器学习法的情况下,作为关注单位期间的作业种类,可以获得一个或多个第一作业种类候补以及该第一作业种类候补为关注单位期间的作业种类的概率。
96.在该情况下,作业种类候补输出部44b基于在关注作业期间内的每个单位期间求出的一个或多个第一作业种类候补以及对应的概率,输出针对关注作业期间的一个或多个作业种类候补(以下称为“第二作业种类候补”)。具体而言,作业种类候补输出部44b在关注作业期间将相同的第一作业种类候补彼此的概率相加。然后,将概率的相加结果大的上位的多个(例如上位的3个)第一作业种类候补,作为关注作业期间的第二作业种类候补输出。在该情况下,第二作业种类候补相当于本发明中的“作业种类候补”。
97.作业种类候补输出部44b也可以将由各单位期间作业推定部44a推定出的各单位时间作业种类中的数量最多的作业种类,决定为最终的作业种类。在该情况下,可以省略为了选择作业种类而被用户利用的作业种类取得部46。
98.如图2中点划线所示,对安装于拖拉机2的作业机3的重量进行检测的重量传感器28也可以设置于拖拉机2。在该情况下,如图2中点划线所示,管理服务器5也可以包含消耗量计算部47。消耗量计算部47在最终的作业种类为消耗资材的播种作业、施肥作业以及药剂播撒作业中的任一种的情况下,基于通过重量传感器28检测出的作业机3的重量的变化,计算资材的消耗量。在该情况下,也可以基于最终的作业种类确定资材是什么。
99.重量传感器28也可以是夹设于拖拉机2与作业机3之间来检测被拖拉机2牵引的作业机3的牵引力的测力传感器。在该情况下,消耗量计算部47也可以基于在作业开始时刻通过测力传感器检测出的牵引力与在作业结束时刻通过测力传感器检测出的牵引力之差来计算资材的消耗量。
100.在用户针对农作业中使用的多个资材分别预先登记了每单位面积的消耗量的情况下,通过根据如上述那样计算出的资材的消耗量,计算每单位面积的资材消耗量,能够自动地推定该资材是什么。
101.此外,在权利请求中所记载的范围,能够进行各种变更。
102.本发明不限定于上述各实施方式,在本发明的技术思想的范围内,各实施方式当然可以适当地变形或者变更。除非技术上产生矛盾,否则各实施方式的技术可以在其他实施方式中使用。
103.本技术主张以于2019年12月2日申请的日本专利申请2019-218090和于2019年12月2日申请的日本专利申请2019-218091为基础的优先权,并将其公开的全部内容引入于此。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。