1.本发明是有关一种功率电路及其控制方法,特别涉及一种具动态调整驱动电阻设定值的功率电路及其控制方法。
背景技术:
2.功率开关元件,如mosfet、igbt、sic-mosfet与gan,广泛应用于电力电子系统中,例如:前端转换器、车用充电系统或驱动变频器,而这些功率开关元件,会在能量转换过程造成切换损失。因应低损失、高效率的趋势,会采用调整功率开关元件栅极(gate)驱动电阻,并将电阻值逐步降低,使得功率开关元件在切换过程中的交叠面积减小,进一步达到损失缩小、效率提高。但一味地减少驱动电阻,切换过程中电压变化(dv/dt)与电流变化(di/dt)的斜率会逐渐增加,造成线路中的寄生电感与耦合电容发生振荡,并超过emi规范的运行限制。因此如何达到最佳运行特性,需要两方面的进行权衡。
3.图1a与图1b为使用双脉冲测试平台,对厂商fuji型号2mbi1400vxb-igbt module进行的性能验证。其中,图1a显示驱动电阻r
g-on
由0ω至4.8ω间开通电压斜率dv/dt,图1b显示驱动电阻r
g-on
由0ω至4.8ω间切换损失e
on
结果。
4.受限规范或电路配置限制,若开通电压斜率dv/dt于设计上要低于9kv/s,则由图1a的结果观察出在使用2mbi1400vxb-igbt module需使用等于或者高于2.4ω以上的驱动电阻值。而驱动电阻值的选定,也决定了开通电压斜率dv/dt与切换损失e
on
的运行行为,随功率开关元件流通电流i
ce
逐渐提高,e
on
损失也随之增加,开通电压斜率dv/dt却开始降低。若可于流通电流i
ce
高于800a时,将驱动电阻由2.4ω切换为0ω,不但能维持9kv/s斜率上限的设计需求,且e
on
损失也可大幅降低。基于此想法,压摆率控制(slew-rate control,src)驱动方式正逐渐取代传统的电路架构。
5.传统src功能启动方式,采用功率开关元件的流通电流与温度信息做为判断条件。将获得的信息经过硬件或固件来进行控制。以下将对这两种方法进行优缺点说明。
6.使用硬件线路检测电流与温度信息来控制en
src
信号范例电路如图2所示。将负载电流反馈信息经过信号处理线路,与预设电流电平进行比较,当负载电流高于电流电平,则将en
src
信号设置为启动状态,反之亦然。另外也可采用温度信息为启动判断,当温度超过src功能需启动的判断点时,en
src
信号设置为启动状态,减少切换损失,降低功率开关元件的运行温度。而图2为单相输出的操作范例,如果线路为三相系统,则同样的信号、比较配置就需增加为三组。对于增加的元件会影响电路板制作的体积与大小,而温度与电流判断线路可依实际需求情况进行取舍。
7.使用固件程序进行src功能的启动判断如图3所示,相较于硬件设置需要复杂的线路元件与增加电路板制作空间来实现,使用微处理器(控制单元)本身就会获取到如电流、温度信息的特点,并通过撰写弹性高的程序,来实现src的驱动方式。
8.然而,使用硬件或固件来进行判断与控制皆存在有其缺点。如图4所示,硬件线路实现方式虽然会需要额外元件组成,不但降低了电路板的布局使用效率,也因为元件选定
之后,src的比较电平就无法随意修改。但其快速的响应,能够强健反应出比较信号快速的变化,达到高正确率的src功能使用;而固件程序改善了电路板布局与比较电平调控性的问题,但受限于微处理器对感测信号取样的问题,会发生于感测信号快速变化上,可能会有src功能使用误动作的产生。
9.如图5所示,使用电流信息作为src比较电平的参考,在实际电路运行上,由于微处理器信号取样的问题,在固件程序实现src方法上,会忽略掉电流涟波的运行特性,进而使启动信号en
src
在不正确的情况下,让功率开关元件无法依照预期的结果进移动作。
10.为此,如何设计出一种功率驱动电路及其操作方法,通过采硬件线路对感测信号高响应动作的特性,并使用权重电路结合固件程序弹性调整栅极驱动器的驱动电阻设定值,达到可于不同使用场合中,根据最佳化程序来动态调整栅极驱动器的驱动电阻设定值,以拥有高正确性src功能启动能力,乃为本公开发明人所研究的重要课题。
技术实现要素:
11.本发明的目的在于提供一种功率驱动电路,解决现有技术的问题。
12.为实现前揭目的,本发明所提出的功率驱动电路包括功率转换模块、多个栅极驱动器、波形处理单元、控制单元、权重单元以及比较器。功率转换模块包括多个开关,功率转换模块接收直流电源以输出交流电力。每一个栅极驱动器分别连接每一个开关的控制端,且每一个栅极驱动器包括驱动电阻设定值。波形处理单元耦接交流电力的交流电流信号以输出交流电流信号的电流绝对值波形。控制单元依据直流电源及交流电力的交流电压信号调整第一脉冲宽度调制信号的责任周期以输出第二脉冲宽度调制信号。权重单元取得第二脉冲宽度调制信号的平均电压,且叠加平均电压与触发电平信号以产生触发电压。当比较器判断电流绝对值波形大于触发电压时,比较器输出压摆率控制信号给每一个栅极驱动器。当每一个栅极驱动器接收到压摆率控制信号时,分别调降每一个栅极驱动器的驱动电阻设定值。
13.在一实施例中,当比较器判断电流绝对值波形没有大于触发电压时,比较器停止输出压摆率控制信号以分别恢复每一个栅极驱动器的驱动电阻设定值。
14.在一实施例中,控制单元更用以检测功率转换模块的工作温度;当控制单元判断工作温度高于温度阈值时,控制单元调整第一脉冲宽度调制信号的责任周期为零。
15.在一实施例中,控制单元依据电流绝对值波形控制多个栅极驱动器来分别调整多个开关选择性地导通或截止。
16.在一实施例中,波形处理单元包括第一运算单元与第二运算单元。第一运算单元接收基准电压,其中第一运算单元反相交流电流信号以产生第一处理波形,且第一运算单元保留低于基准电压的第一处理波形的部分以形成第二处理波形。第二运算单元放大第二处理波形以产生第三处理波形,其中第二运算单元将第三处理波形与交流电流信号叠加以形成第四处理波形,其中第二运算单元反相第四处理波形以输出电流绝对值波形。
17.在一实施例中,第一运算单元包括第一运算放大器、第一电阻、第二电阻、第三电阻、第一二极管以及第二二极管。第一运算放大器包括负输入端、正输入端以及输出端。第一电阻的第一端耦接交流电流信号,且第一电阻的第二端连接第一运算放大器的负输入端。第二电阻的第一端耦接基准电压,且第二电阻的第二端连接第一运算放大器的正输入
端。第三电阻的第一端连接第一电阻的第二端。第一二极管的正极连接第三电阻的第二端。第二二极管的负极连接第一电阻的第二端,且第二二极管的正极连接第一二极管的负极以及第一运算放大器的输出端以产生第二处理波形。
18.在一实施例中,第二运算单元包括第四电阻、第五电阻、第六电阻、第二运算放大器以及第七电阻。第四电阻的第一端连接第三电阻的第二端。第五电阻的第一端连接第一电阻的第一端,且第五电阻的第二端连接第四电阻的第二端。第六电阻的第一端连接第五电阻的第二端以及第四电阻的第二端。第二运算放大器包括负输入端、正输入端以及输出端,其中第二运算放大器的负输入端连接第六电阻的第一端,且第二运算放大器的输出端连接第六电阻的第二端。第七电阻的第一端连接第二电阻的第一端,且第七电阻的第二端连接第二运算放大器的正输入端。
19.在一实施例中,第四电阻的大小为第六电阻的大小的一半。
20.在一实施例中,权重单元包括低通滤波器、第八电阻以及第九电阻。低通滤波器接收第二脉冲宽度调制信号以输出第二脉冲宽度调制信号的平均电压。第八电阻的第一端接收平均电压。第九电阻的第一端耦接触发电平信号,且第九电阻的第二端连接第八电阻的第二端以产生触发电压。
21.在一实施例中,触发电压与平均电压、触发电平信号的关系式为:vx=(v1
×
r9)/(r8 r9) (v2
×
r8)/(r8 r9)。
22.通过所提出的功率驱动电路,可通过采硬件线路对感测信号高响应动作的特性,并使用权重电路结合固件程序弹性调整src比较电平,达到可于不同使用场合中,根据最佳化程序来动态调整栅极驱动器的驱动电阻设定值,以拥有高正确性src功能启动能力。
23.本发明的另一目的在于提供一种功率驱动电路的操作方法,解决现有技术的问题。
24.为实现前揭目的,本发明所提出的功率驱动电路的操作方法用以控制功率转换模块,该操作方法包含:通过功率转换模块将直流电源转换为交流电力;执行绝对值运算程序以取得交流电力的交流电流信号的电流绝对值波形;依据直流电源及交流电力的交流电压信号调整第一脉冲宽度调制信号的责任周期以形成第二脉冲宽度调制信号;取得第二脉冲宽度调制信号的平均电压;叠加平均电压与触发电平信号以产生触发电压;以及比较电流绝对值波形与触发电压。其中当电流绝对值波形大于触发电压时,输出压摆率控制信号给每一个栅极驱动器。当每一栅极驱动器接收到压摆率控制信号时,分别调降每一个栅极驱动器的驱动电阻设定值。
25.在一实施例中,当电流绝对值波形没有大于触发电压时,停止输出压摆率控制信号以分别恢复每一个栅极驱动器的驱动电阻设定值。
26.在一实施例中,操作方法还包含:检测功率转换模块的工作温度。其中当工作温度高于温度阈值时,调整第一脉冲宽度调制信号的责任周期为零。
27.在一实施例中,操作方法还包含:依据电流绝对值波形控制多个栅极驱动器来分别调整多个开关选择性地导通或截止。
28.在一实施例中,绝对值运算程序包含:反相交流电流信号以产生第一处理波形;保留低于基准电压的第一处理波形的部分以形成第二处理波形;放大第二处理波形以产生第三处理波形;叠加第三处理波形与交流电流信号以形成第四处理波形;以及反相第四处理
波形以输出电流绝对值波形。
29.通过所提出的功率驱动电路的操作方法,可通过采硬件线路对感测信号高响应动作的特性,并使用权重电路结合固件程序弹性调整src比较电平,达到可于不同使用场合中,根据最佳化程序来动态调整栅极驱动器的驱动电阻设定值,以拥有高正确性src功能启动能力。
30.为了能更进一步了解本发明为实现预定目的所采取的技术、手段及技术效果,请参阅以下有关本发明的详细说明与附图,相信本发明的目的、特征与特点,当可由此得一深入且具体的了解,然而附图仅提供参考与说明用,并非用来对本发明加以限制者。
附图说明
31.图1a:为现有双脉冲测试平台的开通电压斜率性能的曲线图。
32.图1b:为现有双脉冲测试平台的切换损失性能的曲线图。
33.图2:为现有硬件线路产生压摆率控制信号的电路方框图。
34.图3:为现有固件产生压摆率控制信号的电路方框图。
35.图4:为使用现有硬件线路造成误判断动作的波形示意图。
36.图5:为使用现有固件造成误判断动作的波形示意图。
37.图6:为本发明功率驱动电路的电路方框图。
38.图7:为本发明波形处理单元的电路图。
39.图8:为本发明波形处理单元运行的波形示意图。
40.图9:为本发明权重单元的电路图。
41.图10:为本发明权重单元应用于功率驱动电路的电路方框图。
42.图11a~图11c:为本发明产生触发电压的波形示意图。
43.图12:为本发明产生压摆率控制信号的波形示意图。
44.图13:为本发明功率驱动电路的操作方法的流程图。
45.附图标记说明:
46.10:波形处理单元
47.12:控制单元
48.14:权重单元
49.16:比较器
50.20:功率转换模块
51.21:上开关
52.22:下开关
53.23:温度感测器
54.31:栅极驱动器
55.32:栅极驱动器
56.141:低通滤波器
57.142:稳压电路
58.r1~r9:电阻
59.d1~d2:二极管
60.opa1:第一运算放大器
61.opa2:第二运算放大器
[0062]vdrive
:驱动电压
[0063]rg-on
,r
g-on1
,r
g-on2
,r
g-off
:驱动电阻设定值
[0064]
epwm:第二脉冲宽度调制信号
[0065]
en
src
:压摆率控制信号
[0066]
vo:交流电压信号
[0067]
iload:交流电流信号
[0068]
|vc|:电流绝对值波形
[0069]vt
:工作温度
[0070]
iload-level:触发电平信号
[0071]
vx:触发电压
[0072]
epwm-u:控制信号
[0073]
epwm-n:控制信号
[0074]
v1:第一输入电压
[0075]
v2:第二输入电压
[0076]
dc ,dc-:直流电源
[0077]
s11~s18:步骤
具体实施方式
[0078]
兹有关本发明的技术内容及详细说明,配合附图说明如下。
[0079]
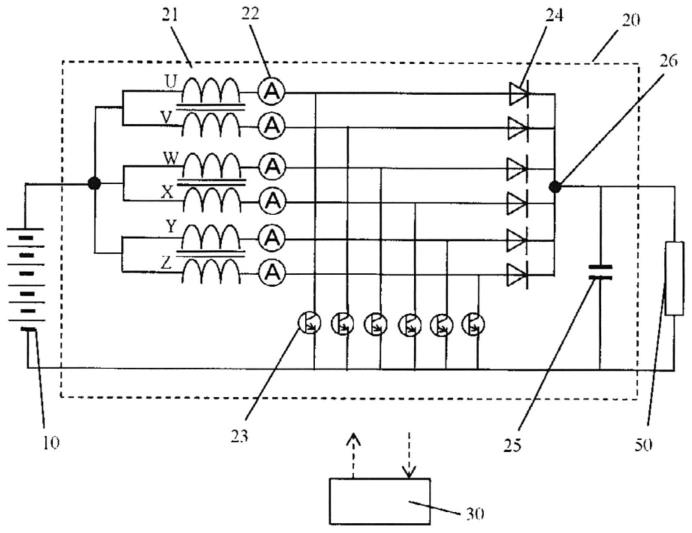
请参见图6所示,其为本发明功率驱动电路的电路方框图。所述功率驱动电路包括功率转换模块20、多个栅极驱动器31,32、波形处理单元10、控制单元12、权重单元以及比较器16。功率转换模块20包括多个开关,在一实施例中,每个开关为绝缘栅双极型晶体管(insulated gate bipolartransistor,igbt),然不以此为限制功率转换模块20接收直流电源dc ,dc-以输出交流电力(包含交流电压信号vo与交流电流信号iload)。
[0080]
每一个栅极驱动器31,32分别连接每一个开关的控制端(以igbt为例,控制端为栅极(gate)端),且每一个栅极驱动器31,32包括驱动电阻设定值r
g-on1
,r
g-off1
,r
g-on2
,r
g-off2
,容后详述。
[0081]
波形处理单元10耦接交流电力的交流电流信号iload以输出交流电流信号iload的电流绝对值波形|vc|。请参见图7与图8所示,其分为本发明波形处理单元的电路图与波形处理单元运行的波形示意图。波形处理单元10包括第一运算单元与第二运算单元。第一运算单元接收基准电压vos,其中第一运算单元反相交流电流信号iload以产生第一处理波形,且第一运算单元保留低于基准电压vos的第一处理波形的部分以形成第二处理波形va(配合图8(b)所示)。第二运算单元放大第二处理波形va以产生第三处理波形,其中第二运算单元将第三处理波形与交流电流信号iload叠加以形成第四处理波形(配合图8(c)所示),其中第二运算单元反相第四处理波形以输出电流绝对值波形|vc|(配合图8(d)所示)。
[0082]
在一些实施例中,依据波形处理单元10输出的电流绝对值波形|vc|的大小,控制单元12分别调整控制信号e-pwm-n、epwm-u的责任周期,以控制多个栅极驱动器31,32来分
别调整多个开关21,22选择性地导通或截止。
[0083]
在一些实施例中,波形处理单元10中通常会设置电流感测器(图未示),例如:霍尔感测器(hall sensor)。因此,波形处理单元10可以检测并接收交流电力信号中的交流电流信号iload。然,本发明不限于此。
[0084]
具体地,第一运算单元包括第一运算放大器opa1、第一电阻r1、第二电阻r2、第三电阻r3、第一二极管d1以及第二二极管d2。第一运算放大器opa1包括负输入端、正输入端以及输出端。第一电阻r1的第一端耦接交流电流信号iload,且第一电阻r1的第二端连接第一运算放大器opa1的负输入端。第二电阻r2的第一端耦接基准电压vos,且第二电阻r2的第二端连接第一运算放大器opa1的正输入端。第三电阻r3的第一端连接第一电阻r1的第二端。第一二极管d1的正极连接第三电阻r3的第二端。第二二极管d2的负极连接第一电阻r1的第二端,且第二二极管d2的正极连接第一二极管d1的负极以及第一运算放大器opa1的输出端以产生第二处理波形va。在一些实施例中,第一电阻r1的第一端是连接于设置于波形处理单元10中的电流感测器(图未示),以接收交流电流信号iload,但本发明不限于此。
[0085]
第二运算单元包括第四电阻r4、第五电阻r5、第六电阻r6、第二运算放大器opa2以及第七电阻r7。第四电阻r4的第一端连接第三电阻r3的第二端。第五电阻r5的第一端连接第一电阻r1的第一端,且第五电阻r5的第二端连接第四电阻r4的第二端。第六电阻r6的第一端连接第五电阻r5的第二端以及第四电阻r4的第二端。第二运算放大器opa2包括负输入端、正输入端以及输出端。其中第二运算放大器opa2的负输入端连接第六电阻r6的第一端,且第二运算放大器opa2的输出端连接第六电阻r6的第二端。第七电阻r7的第一端连接第二电阻r2的第一端,且第七电阻r7的第二端连接第二运算放大器opa2的正输入端。图7所示的波形处理单元10为其中一种可实施的电路,然不以该实施电路限制本发明,举凡可以作为信号绝对化运算的电路皆可作为本发明的波形处理单元使用。
[0086]
在一些实施例中,第四电阻r4的大小为第六电阻r6的大小的一半,所以第二运算单元是放大第二处理波形va为原本两倍的第二处理波形va以产生第三处理波形2va,但本发明不限于此。
[0087]
控制单元12接收直流电源dc ,dc-与交流电力的交流电压信号vo,且依据直流电源dc ,dc-与交流电压信号vo调整第一脉冲宽度调制信号(图未示)的责任周期(duty cycle)以输出第二脉冲宽度调制信号epwm。其中,第二脉冲宽度调制信号epwm相较于第一脉冲宽度调制信号(图未示)为责任周期经调整后的信号。在本实施例中,控制单元12可为数字控制器,即其具备数字信号处理、运算以及控制的功能,可为但不限定为微控制器(microcontroller,mcu)、数字信号处理器(digital signal processor,dsp)、现场可程序化闸阵列(field-programmable gate array,fpga)或者特殊应用集成电路(application-specific integrated circuit,asic)。
[0088]
在其他一些实施例中,第一脉冲宽度调制信号(图未示)为设置于控制单元12内的信号,且控制单元12通常会依据功率转换模块20所接收的直流电源dc ,dc-及/或输出的交流电力(含交流电压信号vo及/或交流电流信号iload)来调整第一脉冲宽度调制信号(图未示)的责任周期(duty cycle)以输出第二脉冲宽度调制信号epwm。通常,交流电力包含交流电流信号iload及/或交流电压信号vo,但本发明不限于此。
[0089]
权重单元14取得该第二脉冲宽度调制信号epwm的平均电压v1,且叠加平均电压v1
与触发电平信号iload-level以产生触发电压vx。容后详加说明。比较器16耦接权重单元14与波形处理单元10,接收触发电压vx与电流绝对值波形|vc|,并且比较触发电压vx与电流绝对值波形|vc|。容后详加说明。其中,当该比较器16判断电流绝对值波形|vc|大于触发电压vx时,比较器16输出压摆率控制信号en
src
给每一个栅极驱动器31,32。
[0090]
当每一个栅极驱动器31,32未接收到压摆率控制信号en
src
,且控制单元12输出的控制信号epwm-u导通功率转换模块20的上开关21,且控制单元12输出的控制信号epwm-n关闭功率转换模块20的下开关22时,栅极驱动器31的驱动电阻设定值r
g-on1
与栅极驱动器32的r
g-off2
为并联操作。反之,控制单元12输出的控制信号epwm-u截止上开关21且输出控制信号epwm-n导通下开关22时,栅极驱动器31的驱动电阻设定值r
g-off1
与栅极驱动器32的r
g-on2
为并联操作。
[0091]
当每一个栅极驱动器31,32接收到压摆率控制信号en
src
时,通过更多的电阻并联,以分别调降每一个栅极驱动器31,32的驱动电阻设定值r
g-on1
,r
g-off1
,r
g-on2
,r
g-off2
。当每一个栅极驱动器31,32接收到压摆率控制信号en
src
时,每一个栅极驱动器31,32的驱动电阻设定值则由所有的驱动电阻设定值r
g-on1
,r
g-on2
与驱动电阻设定值r
g-off1
,r
g-off2
并联所决定。因此,当所有的驱动电阻设定值r
g-on1
,r
g-off1
,r
g-on2
,r
g-off2
并联时,每一个栅极驱动器31,32的驱动电阻设定值将被调降。
[0092]
例如,当每一个栅极驱动器31,32接收到压摆率控制信号en
src
时,如果控制单元12输出的控制信号epwm-u、epwm-n以分别导通上开关21且关闭下开关22,则栅极驱动器31的驱动电阻设定值r
g-on1
和r
g-on2
为并联操作,且栅极驱动器32的驱动电阻设定值r
g-off1
和r
g-off2
为并联操作。同理,当每一个栅极驱动器31,32接收到压摆率控制信号en
src
时,如果控制单元12输出的控制信号epwm-u、epwm-n以分别关闭上开关21且导通下开关22,则栅极驱动器31的驱动电阻设定值r
g-off1
和r
g-off2
为并联操作,且栅极驱动器32的驱动电阻设定值r
g-on1
和r
g-on2为
并联操作。如此一来,当每一个栅极驱动器31,32接收到压摆率控制信号en
src
时,上开关21和下开关22所连接的驱动电阻值皆会降低,使得上开关21和下开关22的切换损失也跟着降低,如图1b所示。
[0093]
请参见图9与图10所示,其分为本发明权重单元的电路图与权重单元应用于功率驱动电路的电路方框图。如图9所示,权重单元14主要具有三端点,包含用以接收第一输入电压v1的第一输入端、用以接收第二输入电压v2的第二输入端,以及提供触发电压vx的输出端。具体地,如图10所示,权重单元14包括低通滤波器141、第八电阻r8以及第九电阻r9。低通滤波器141接收第二脉冲宽度调制信号epwm以输出第二脉冲宽度调制信号epwm的平均电压v1。第八电阻r8的第一端接收平均电压v1。第九电阻r9的第一端耦接触发电平信号iload-level(即电压v2),且第九电阻r9的第二端连接第八电阻r8的第二端以产生触发电压vx。
[0094]
权重单元14包含第八电阻r8、第九电阻r9以及电容cw。第八电阻r8的一端、第九电阻r9的一端以及电容cw的一端共接于输出端,并且第八电阻r8的另一端为第一输入端、第九电阻r9的另一端为第二输入端以及电容cw的另一端连接于接地端。因此,如图所示的权重单元14,其输出的触发电压vx与输入的第一输入电压v1、第二输入电压v2的关系式为:
[0095]
vx=(v1
×
r9)/(r8 r9) (v2
×
r8)/(r8 r9)
[0096]
在本发明中,第一输入电压v1为第二脉冲宽度调制信号epwm的平均电压v1,第二
输入电压v2为触发电平信号iload-level。
[0097]
由上式可看出,当第八电阻r8与第九电阻r9为固定时,触发电压vx的大小受到第一输入电压v1与第二输入电压v2控制。当第一输入电压v1与第二输入电压v2同时增加时,触发电压vx上升。当第一输入电压v1与第二输入电压v2同时下降时,触发电压vx下降。若第一输入电压v1与第二输入电压v2分别为一个上升、一个下降,则触发电压vx会根据第一输入电压v1与第二输入电压v2分配量(配比)而有所反应,因此称为权重电路。
[0098]
结合微控制器(即控制单元12)搭配硬件线路实施时,权重单元14还包含低通滤波器141与稳压电路142。低通滤波器141耦接第八电阻r8,接收控制单元12所提供的第二脉冲宽度调制信号epwm,用以将由方波高频信号,变成直流信号,即经低通滤波器141得到第二脉冲宽度调制信号epwm的平均电压作为第一输入电压v1。稳压电路142耦接第九电阻r9,接收触发电平信号iload-level,用以对触发电平信号iload-level进行稳压操作,因此,电压v2亦可谓为经稳压后的触发电平信号iload-level。其中,稳压电路142可以是电容或者是电压随耦器(voltage follower)的电路形态所实现。
[0099]
值得一提,使用硬件线路作src功能时,其拥有正确的触发电平信号(例如电流触发电平信号或温度触发电平信号),但因为在硬件电路上,触发信号的触发电平通常是产生个外部固定电压信号,而此触发信号在修正上,需要通过更换硬件线路上的元件来实现,在调整触发电平上,硬件线路的弹性较差。然而,使用固件程序,搭配微控制器作src功能时,其触发电平可通过读取输入电压、输出电压、负载命令或是功率开关元件的选用型号,在已完成的程序中,简易的得到触发电平的调整,不过固件程序的输入信息受限于微控制器的取样速度,因此在正确压摆率控制信号en
src
动作上,其反应速度较慢。而图10就是结合硬件正确的压摆率控制信号en
src
动作与固件程序可调整触发电压vx,各取其优点提出的结果。
[0100]
请参见图11a至图11c所示,其为本发明产生触发电压的波形示意图。根据不同的第二脉冲宽度调制信号epwm的责任周期,在固定(仅为方便说明,不以此为限制本发明)的触发电平信号iload-level下,可得到不同触发电压vx的举例说明。其中,第二脉冲宽度调制信号epwm的平均电压作为权重单元14的第一输入电压v1,而触发电平信号iload-level则作为权重单元14的第二输入电压v2。并且,配合前述输出的触发电压vx与输入的第一输入电压v1、第二输入电压v2的关系式加以说明。
[0101]
以图11a为例,第二脉冲宽度调制信号epwm为控制单元12所输出,其为责任周期为50%的方波信号,大小为0至3.3伏特。触发电平信号iload-level为硬件线路产生,为固定的1.65伏特。再者,假设第八电阻r8与第九电阻r9相同。因此,根据前述关系式,可计算出触发电压vx:
[0102]
vx=(3.3
×
50%
×
r9)/(r8 r9) (1.65
×
r8)/(r8 r9)=1.65伏特。
[0103]
以图11b为例,第二脉冲宽度调制信号epwm的责任周期为25%的方波信号,大小为0至3.3伏特。触发电平信号iload-level为固定的1.65伏特。再者,假设第八电阻r8与第九电阻r9相同。因此,根据前述关系式,可计算出触发电压vx:
[0104]
vx=(3.3
×
25%
×
r9)/(r8 r9) (1.65
×
r8)/(r8 r9)=1.2375伏特。
[0105]
以图11c为例,第二脉冲宽度调制信号epwm的责任周期为80%的方波信号,大小为0至3.3伏特。触发电平信号iload-level为固定的1.65伏特。再者,假设第八电阻r8与第九电阻r9相同。因此,根据前述关系式,可计算出触发电压vx:
[0106]
vx=(3.3
×
80%
×
r9)/(r8 r9) (1.65
×
r8)/(r8 r9)=2.145伏特。
[0107]
因此,经由图11a~图11c的三个范例可得到,触发电平信号iload-level的电压在没变动的情况下,仍可通过固件程序配合控制单元12调整第二脉冲宽度调制信号epwm的大小,进而控制触发电压vx的高低,来达到较高弹性的触发电平修正。
[0108]
请参见图12所示,其为本发明产生压摆率控制信号的波形示意图。经由权重单元14对第二脉冲宽度调制信号epwm与触发电平信号iload-level进行权重计算后所得到的触发电压vx与电流绝对值波形|vc|(通过比较器16)进行比较。配合参见图6,当电流绝对值波形|vc|大于触发电压vx时(然不以此为限制,亦即可为大于或等于的判断),比较器16输出的压摆率控制信号en
src
为高电平,控制栅极驱动器31的驱动电阻值r
g-on1
与r
g-on2
并联,且r
g-off1
与r
g-off2
并联,同理,栅极驱动器32亦是如此,使得栅极驱动器31与栅极驱动器32的驱动电阻设定值将被调降。反之,若电流绝对值波形|vc|小于或等于触发电压vx时(然不以此为限制,亦即可为小于的判断),比较器16输出的压摆率控制信号en
src
为低电平,因此恢复栅极驱动器31的驱动电阻设定值则视上开关21导通或截止的状态决定仅为驱动电阻设定值r
g-on1
操作或者仅为驱动电阻设定值r
g-off1
操作,或者视下开关22导通或截止的状态决定仅为驱动电阻设定值r
g-on2
操作或者仅为驱动电阻设定值r
g-off2
操作。同理,亦恢复栅极驱动器32的驱动电阻设定值则视上开关21导通或截止的状态决定仅为驱动电阻设定值r
g-on1
操作或者仅为驱动电阻设定值r
g-off1
操作,或者视下开关22导通或截止的状态决定仅为驱动电阻设定值r
g-on2
操作或者仅为驱动电阻设定值r
g-off2
操作。
[0109]
复请参见图6,功率转换模块20还包含温度感测器23,用以检测功率转换模块20的工作温度v
t
。并且工作温度v
t
的信息传送至控制单元12。因此,当控制单元12判断工作温度v
t
高于温度阈值时,控制单元12调整第一脉冲宽度调制信号的责任周期为零。如此,配合触发电压vx与输入的第一输入电压v1、第二输入电压v2的关系式可知,一旦第一脉冲宽度调制信号的责任周期为零,则根据关系式所计算出来的触发电压vx将明显地变小,因此,使得电流绝对值波形|vc|容易地大于触发电压vx,而能够实现当功率转换模块20的工作温度v
t
过高时,通过驱动电阻设定值r
g-on1
与r
g-on2
并联,且r
g-off1
与r
g-off
2并联,来调降每一个栅极驱动器31,32的驱动电阻设定值。
[0110]
请参见图13,其为本发明功率驱动电路的操作方法的流程图。所述功率驱动电路的操作方法用于功率驱动电路。所述操作方法包含步骤:首先,通过功率转换模块20将直流电源dc ,dc-转换为交流电力vo(s11)。然后,执行绝对值运算程序以取得交流电力的交流电流信号的电流绝对值波形|vc|(s12)。然后,依据直流电源dc ,dc-及交流电力的交流电压信号调整第一脉冲宽度调制信号的责任周期以形成第二脉冲宽度调制信号epwm(s13)。然后,取得第二脉冲宽度调制信号epwm的平均电压v1(s14)。然后,叠加平均电压v1与触发电平信号iload-level以产生触发电压vx(s15)。然后,比较电流绝对值波形|vc|与触发电压vx(s16)。当电流绝对值波形|vc|大于触发电压vx时,输出压摆率控制信号en
src
给每一个栅极驱动器31,32(s17)。当每一个栅极驱动器31,32接收到压摆率控制信号en
src
时,分别调降每一个栅极驱动器31,32的驱动电阻设定值(s18),例如:驱动电阻设定值r
g-on1
与r
g-on2
并联,且r
g-off1
与r
g-off2
并联。
[0111]
综上所述,本发明具有以下的特征与优点:采硬件线路对感测信号高响应动作的特性,并使用权重电路结合固件程序弹性调整栅极驱动器的驱动电阻设定值,达到可于不
同使用场合中,根据最佳化程序来动态调整栅极驱动器的驱动电阻设定值,以拥有高正确性src功能启动能力。并且,亦可通过人机接口或通信方式让使用者能做自定义上的运行,以提高使用的弹性与多样性。
[0112]
以上所述,仅为本发明优选具体实施例的详细说明与附图,而本发明的特征并不局限于此,并非用以限制本发明,本发明的所有范围应以权利要求为准,凡合于本发明权利要求的构思与其类似变化的实施例,皆应包含于本发明的范围中,任何本领域技术人员在本发明的领域内,可轻易思及的变化或修饰皆可涵盖在本公开的权利要求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。