技术特征:
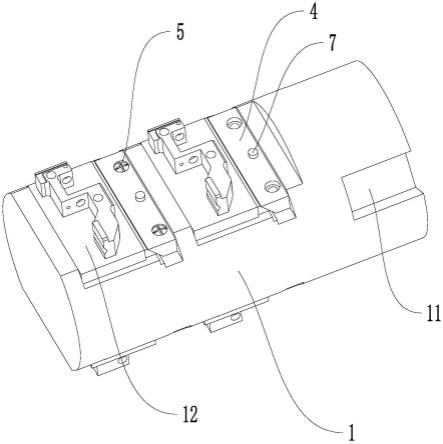
1.一种用于校正汽车抬头显示的协作机器人,其特征在于,包括:标定摄像头(1);及驱动标定摄像头(1)进出车窗的行走机构;及用于安装行走机构的立柱(2);其中,所述标定摄像头(1)、行走机构由plc控制器控制,所述plc控制器设有通信接口或无线通信模块。2.根据权利要求1所述的用于校正汽车抬头显示的协作机器人,其特征在于,所述行走机构包括:第一机械臂(3);及驱动第一机械臂(3)绕其端部转动的第一伺服电机(4);及第二机械臂(5);及驱动第二机械臂(5)绕其端部转动的第二伺服电机(6);其中,所述第一伺服电机(4)与立柱(2)连接,所述第二伺服电机(6)安装于第一机械臂(3)远离第一伺服电机(4)的一端,所述标定摄像头(1)与第二机械臂(5)连接;所述第一伺服电机(4)的转轴沿水平方向延伸,且与第二伺服电机(6)的转轴平行。3.根据权利要求2所述的用于校正汽车抬头显示的协作机器人,其特征在于:所述标定摄像头(1)安装于连接板(7),所述连接板(7)与第二机械臂(5)连接。4.根据权利要求3所述的用于校正汽车抬头显示的协作机器人,其特征在于,所述行走机构还包括:驱动连接板(7)绕其远离标定摄像头(1)的一端转动的第五伺服电机(10);及驱动第五伺服电机(10)绕其远离连接板(7)的一端转动的第四伺服电机(9);及驱动第四伺服电机(9)绕其远离第五伺服电机(10)的一端转动的第三伺服电机(8);其中,所述第三伺服电机(8)安装于第二机械臂(5)远离第二伺服电机(6)的一端,所述第三伺服电机(8)的转轴与第二伺服电机(6)的转轴平行;所述第四伺服电机(9)的转轴与第三伺服电机(8)的转轴垂直,所述第五伺服电机(10)的转轴与第四伺服电机(9)的转轴垂直。5.根据权利要求1到4中任意一项所述的用于校正汽车抬头显示的协作机器人,其特征在于:所述行走机构还包括驱动第一伺服电机(4)绕立柱(2)转动的第六伺服电机(11);所述第六伺服电机(11)安装于立柱(2);所述第六伺服电机(11)的转轴沿竖直方向延伸,并第一伺服电机(4)的转轴垂直。6.根据权利要求3所述的用于校正汽车抬头显示的协作机器人,其特征在于:所述连接板(7)还设有对标定摄像头(1)的侧面构成保护的护板(12)。
技术总结
本实用新型提供了一种用于校正汽车抬头显示的协作机器人,目的是解决汽车抬头显示的显示位置可能存在偏斜的技术问题。所采用的技术方案是:一种用于校正汽车抬头显示的协作机器人,包括:标定摄像头、驱动标定摄像头进出车窗的行走机构、用于安装行走机构的立柱;其中,所述标定摄像头、行走机构由PLC控制器控制,所述PLC控制器设有通信接口或无线通信模块。本实用新型可以模拟驾驶员的观察位置与观察角度,对汽车抬头显示的显示影像进行拍摄;并将拍摄的影像传输给电脑,以供电脑对比拍摄影像与预设影像,从而协作电脑对汽车抬头显示进行校正。校正。校正。
技术研发人员:杨检 王建 黄洪 陈昌雨
受保护的技术使用者:成都弥荣科技发展有限公司
技术研发日:2021.12.27
技术公布日:2022/7/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。