用于介入和外科手术的装置及其使用方法
1.相关申请的交叉引用
2.本技术是国际(pct)专利申请,涉及并要求利用2019年8月16日提交的、名称为“用于介入和外科手术的装置及其使用方法”、申请人相同的、同样在审中的、申请号为62/888,288的美国临时专利申请的优先权,其全部内容通过引用并入本文。
技术领域
3.本发明涉及医学成像。更具体地说,本发明涉及一种装置,该装置被配置成附接到支气管镜的远端,以使得当该装置位于患者体内时能够对该装置进行导航,并且使得能够基于显示该装置位于患者体内的二维医学图像来确定该装置的深度。本发明还涉及一种使用这种装置的方法。
背景技术:
4.支气管镜是用于获取患者体内(例如,患者肺部)体腔图像的医疗装置。为了正确评估使用支气管镜获得的图像,必须知道支气管镜在三个维度上的位置(即包括支气管镜在体内的深度)。
技术实现要素:
5.在一个实施例中,被配置为附接到支气管镜的装置包括涂抹器、轴、导管、导丝、连接器、手柄和不透射线材料,涂抹器具有近端、远端、以及从近端延伸到远端的内部通道,轴具有近端、远端和从近端延伸到远端的内部通道,轴配置为可滑动地容纳在涂抹器的内部通道内,导管配置成定位在轴的内部通道内,导丝定位在导管内,连接器配置成附接到涂抹器的远端,配置成接合支气管镜,并且配置成相对于轴可旋转,手柄附接到涂抹器的近端,手柄包括触发器,该触发器可操作以选择性地锁定或解锁轴相对于涂抹器的滑动运动,不透射线材料附接到装置的外部,不透射线材料以预定图案定位。
6.在一个实施例中,图案是不均匀的。在一个实施例中,该图案包括在第一位置具有第一密度和在第二位置具有第二密度的不透射线材料,第一和第二密度彼此不同。在一个实施例中,不透射线材料位于(a)导管上,(b)导丝上,或(c)导管和导丝上。
7.在一个实施例中,涂抹器的近端包括鲁尔锁入口。在一个实施例中,连接器包括鲁尔锁塞,该鲁尔锁塞连接到涂抹器近端的鲁尔锁入口。
8.在一个实施例中,导丝是柔性的、刚性的、预弯曲的和/或被配置成弯曲的。在一个实施例中,导管包括拉线,该拉线被配置成控制导丝的曲率。在一个实施例中,握把手柄被配置为相对于轴旋转。在一个实施例中,该装置还包括位于轴内的聚四氟乙烯管,该聚四氟乙烯管被配置为引导导管的运动。
9.在一个实施例中,用于医学成像的方法包括提供支气管镜;该方法还包括提供被配置为附接到支气管镜的装置,该装置包括涂抹器、轴、导管、导丝、连接器、手柄和不透射线材料,涂抹器具有近端,远端,以及从近端延伸到远端的内部通道,轴具有近端、远端和从
近端延伸到远端的内部通道,轴被配置为可滑动地容纳在涂抹器的内部通道内,导管配置成定位在轴的内部通道内,导丝定位在导管内,连接器配置成附接到涂抹器的远端,配置成接合支气管镜,并且被配置为可相对于轴旋转,手柄附接到涂抹器的近端,手柄包括触发器,该触发器可操作以选择性地锁定或解锁轴相对于涂抹器的滑动运动,不透射线材料附接到装置的外部,不透射线材料以预定图案定位;该方法还包括将该装置附接到支气管镜;该方法还包括将支气管镜放置在患者身体的体腔内;该方法还包括获得患者身体的至少一部分的至少一个医学图像,该至少一部分包括体腔;并且该方法还包括基于至少预定图案和至少一个医学图像确定装置在体内的深度。
10.在一个实施例中,医学图像是x射线。
11.在一些实施例中,装置包括:护套,具有近端、与近端相对的远端、以及从近端到远端延伸穿过护套的腔,其中护套被偏压到释放位置;拉线,沿着护套从近端延伸到远端,并在远端与护套连接,其中拉线和护套被配置为协作,使得向护套的近端拉动拉线使护套的远端处于活动位置,并且使得释放拉线使护套的远端返回到释放位置;以及连接到所述护套的近端和所述拉线的控制部分,其中所述控制部分包括控制元件,所述控制元件可操作以选择性地向所述护套的近端拉动所述拉线或释放所述拉线。
12.在一些实施例中,护套包括多个不透射线标记。在一些实施例中,多个不透射线标记沿护套以图案布置。
13.在一些实施例中,护套的尺寸和形状适于容纳在具有直径为2.8毫米的工作通道的支气管镜内,并且能够在腔的护套内容纳内治疗附件,内治疗附件被配置成装配在内径为2.0毫米的工作通道内。
14.在一些实施例中,释放位置是直线位置并且活动位置是弯曲位置。在一些实施例中,弯曲位置的曲率是可变的,这取决于拉线被拉向护套的近端的程度。
15.在一些实施例中,控制部分包括操作杆,操作杆可由用户操作以将拉线拉向护套的近端。在一些实施例中,装置还包括锁定机构,锁定机构可由用户操作以将操作杆锁定在选定位置。
16.在一些实施例中,控制部分还包括鲁尔锁,鲁尔锁被配置为接收注射器并且将注射器连接到护套。
17.在一些实施例中,装置还包括手柄连接机构,手柄连接机构被配置为将装置连接到涂抹器。
18.在一些实施例中,一种方法包括(1)提供包括护套、拉线和控制部分的装置,其中护套包括近端、与近端相对的远端、从近端到远端延伸穿过护套的腔,其中护套被偏压到释放位置,并且其中护套包括沿着护套定位的多个不透射线标记;其中,所述拉线沿着所述护套从所述近端延伸到所述远端,并在所述远端与所述护套连接,其中,所述拉线和所述护套构被配置为协作,使得向所述护套的近端拉动所述拉线使所述护套的远端处于活动位置,并且使得所述拉线的释放使所述护套的远端返回到释放位置;并且其中所述控制部分连接到所述护套的近端和所述拉线,其中所述控制部分包括控制元件,所述控制元件可操作以选择性地向所述护套的近端拉动所述拉线或释放所述拉线;(2)将护套推进患者体腔内,使护套的远端位于体腔内的分叉处;(3)通过由医学成像装置获得的实时医学成像模态显示体腔内的护套视图;(4)确定护套远端的最佳位置,以使护套前进通过分叉;(5)操作控制部
分以将护套的远端定位在最佳位置;和(6)推进护套通过分叉处。
19.在一些实施例中,该方法还包括以下步骤:确定医学成像装置的最佳姿态以显示护套和分叉;将所述医学成像装置定位在所述最佳姿态;以及显示护套和分叉的更新视图,其中基于更新视图确定最佳位置。
20.在一些实施例中,体腔是支气管气道。
21.在一些实施例中,该方法还包括在另一分叉处重复步骤(3)、(4)、(5)和(6)。在一些实施例中,在另一分叉处重复步骤(3)、(4)、(5)和(6),直到护套的远端到达目标区域。
附图说明
22.图1示出了示例性方法的流程图。
23.图2a示出了沿示例性装置的长度的不透射线材料的密度图。
24.图2b示出了图2a的装置的荧光图像中的灰度强度图。
25.图2c示出了图2a装置的荧光图像中的灰度强度图,其中该装置被部分遮挡。
26.图2d示出了成像装置的灰度强度与不透射线材料的密度之间的相关性。
27.图2e示出了示例性装置的渲染图,该装置包括位于患者肺部并被部分遮挡的不透射线材料的图案。
28.图2f示出了示例性装置上的不透射线材料的第一示例性图案的图表。
29.图2g示出了示例性装置的渲染图,该装置包括定位在患者肺部并部分遮挡的不透射线材料的图案,该装置具有如图2a所示密度的不透射线材料。
30.图2h示出了沿着示例性装置的长度的不同尺寸和不同间距的不透射线材料的示例性环。
31.图2i示出了示例性装置上的不透射线材料的第二示例性图案的图表。
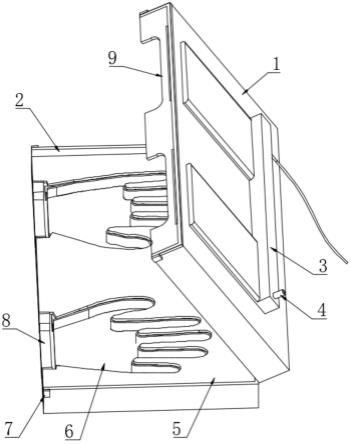
32.图3a显示了包括涂抹器、导管和导丝的示例性装置,该装置被示出为拆开的。
33.图3b示出了图3a的涂抹器处于延伸位置。
34.图3c显示了图3a的涂抹器处于缩回位置。
35.图4a示出了图3a的装置,该装置被示为已组装。
36.图4b示出了图4a的装置,该装置被示出具有延伸的导丝。
37.图5示出了图3a所示的涂抹器的爆炸图。
38.图6a显示了图3a的涂抹器,涂抹器的触发器显示为处于解锁位置。
39.图6b显示了图3a的涂抹器,涂抹器的触发器显示为处于锁定位置。
40.图7a示出了图6a所示的涂抹器的局部剖视图。
41.图7b显示了图6b中所示的涂抹器的局部剖视图。
42.图8a示出了图3a的涂抹器的一部分,该涂抹器是从与图3a所示方向相反的方向观察的。
43.图8b显示了图3a的涂抹器的局部剖视图。
44.图9a示出了图4a的示例性组装好的装置,该装置的涂抹器被示出处于延伸位置并接近脱离的连接器部分。
45.图9b示出了图4a的示例性组装好的装置,轴的远端部分被示为靠近可拆卸的连接器部分。
46.图10示出了图3a的示例性涂抹器的示例性轴的爆炸图。
47.图11a示出了图3a的示例性涂抹器的示例性线提取按钮的局部剖视图。
48.图11b示出了图11a的示例性线提取按钮的爆炸图。
49.图12示出了图3a的示例性涂抹器的护套鲁尔锁入口。
50.图13a示出了示例性鲁尔锁塞,其配置为接合图3a的涂抹器的示例性连接器。
51.图13b示出了图13a的示例性鲁尔锁塞与图3a的涂抹器的示例性连接器接合。
52.图13c示出了具有密封装置的连接器部分的组装图。
53.图13d示出了图13c的连接器部分的爆炸图。
54.图14显示了具有操纵机构的示例性可操纵护套,可操纵护套显示为处于释放配置。
55.图15显示了具有操纵机构的示例性可操纵护套,可操纵护套显示为处于活动配置。
56.图16a示出了图14的示例性可操纵护套的爆炸图。
57.图16b示出了示例性可操纵护套和手柄连接机构的实施例的爆炸图。
58.图16c从另一视角示出了图16b的示例性可操纵护套和手柄连接机构的爆炸图。
59.图17a示出了图14的示例性可操纵护套的剖视图,该可操纵护套被示出处于活动配置。
60.图17b示出了图14的示例性可操纵护套的剖视图,可操纵护套显示为处于释放配置。
61.图17c示出了图16b的示例性手柄连接机构的立体图,手柄连接机构被示出处于释放配置。
62.图17d示出了图16b的示例性手柄连接机构的侧视图,手柄连接机构被示出处于释放配置。
63.图17e示出了图16b的示例性手柄连接机构的立体图,手柄连接机构被示出处于活动配置。
64.图17f示出了图16b的示例性手柄连接机构的立体图,手柄连接机构被示出处于活动和解锁配置。
65.图17g示出了图17f的示例性手柄连接机构的局部剖视图。
66.图17h示出了图16b的示例性手柄连接机构的立体图,所示的手柄连接机构处于活动和锁定配置。
67.图17i示出了图17h的示例性手柄连接机构的局部剖视图。
68.图18a示出了图14的示例性可操纵护套在连接例如图3a中所示的示例性涂抹器的手柄过程的第一阶段。
69.图18b示出了在连接过程的第二阶段的图18a的示例性可操纵护套和示例性手柄。
70.图18c示出了在连接过程的第三阶段的图18a的示例性可操纵护套和示例性手柄。
71.图19a示出了图14的示例性可操纵护套,其连接到例如图3a所示的示例性涂抹器,涂抹器的连接器元件示出为处于缩回位置。
72.图19b示出了图19a的示例性可操纵护套和示例性涂抹器,涂抹器的连接器元件处于延伸位置。
73.图20示出了一个有代表性的解剖分叉。
74.图21显示了仪器导航通过解剖腔、通过多个分叉的迭代过程的流程图。
75.图22a示出了可操纵机构的控制部分的实施例的立体图。
76.图22b示出了图22a的可操纵机构的控制部分的爆炸图。
77.图22c示出了图22a的可操纵机构的控制部分的剖视图,控制部分定位在释放配置中。
78.图22d示出了图22a的可操纵机构的控制部分的剖视图,控制部分定位在活动配置中。
79.图23示出了示例性编织物的立体图,示例性不透射线元件位于其上。
具体实施方式
80.将参考附图进一步解释本发明,其中在几个视图中相同的结构用相同的数字表示。所示的附图不一定按比例绘制,相反,重点通常放在说明本发明的原理上。此外,某些特征可能被夸大以显示特定组件的细节。
81.这些图构成了本说明书的一部分,包括本发明的说明性实施例,并示出其各种目的和特征。此外,这些图不一定按比例绘制,一些特征可能被夸大以显示特定组件的细节。此外,图中所示的任何测量值、规格等都是说明性的,而不是限制性的。因此,本文公开的具体结构和功能细节不应被解释为限制性的,而仅作为教导本领域技术人员以各种方式使用本发明的代表性基础。
82.在已经公开的这些优点和改进中,本发明的其他目的和优点将从以下结合附图的描述中变得显而易见。这里公开了本发明的详细实施例;然而,应该理解,所公开的实施例仅仅是对本发明的说明,本发明可以以各种形式实施。此外,结合本发明的各种实施例给出的每个实施例是说明性的,而不是限制性的。
83.在整个说明书和权利要求书中,除非上下文另有明确规定,否则以下术语具有与本文明确相关的含义。这里使用的短语“在一个实施例中”和“在一些实施例中”不一定指相同的实施例,尽管可能指相同的实施例。此外,这里使用的短语“在另一个实施例中”和“在一些其他实施例中”不一定指不同的实施例,尽管它可能指不同的实施例。因此,如下所述,在不脱离本发明的范围或思想的情况下,可以容易地组合本发明的各种实施例。
84.术语“基于”不是排他性的,并且允许基于未描述的其他因素,除非上下文另有明确规定。此外,在整个说明书中,“一个(a)”、“一个(an)”和“该”的含义包括复数引用。“在”的含义包括“在
……
内”和“在
……
上”。
85.如本文所用,术语“不透射线”是指一种特征在于电磁辐射(包括但不限于x射线)不能穿过的材料。
86.在一些实施例中,本发明是一种装置,包括:
87.涂抹器;
88.轴;
89.导管;
90.导丝;
91.连接器;
92.手柄;
93.触发器;
94.鲁尔锁塞;和
95.不透射线材料;
96.其中涂抹器具有从涂抹器的近端到远端的内部开放通道,
97.其中,涂抹器的内部开放通道的尺寸足以容纳轴;
98.其中,轴的尺寸足以容纳导管和导丝,
99.其中,导管和导丝被配置为具有允许导丝伸出导管的提取按钮,
100.其中,导管和导丝被配置为具有预弯曲的远侧尖端,
101.其中,导管近端被配置为具有鲁尔锁入口,
102.其中,导丝被配置为与导管连接或分离,
103.其中,轴被配置为允许在涂抹器内部和外部移动,
104.其中,轴远端被配置为允许轴旋转,
105.其中,轴远端被配置为与连接器连接或分离,
106.其中,涂抹器的远端被附接到连接器上,
107.其中,连接器被配置为附接到支气管镜,
108.其中,连接器被配置为与支气管镜连接或分离,
109.其中,连接器被配置为包括鲁尔锁塞,
110.其中,涂抹器的近端被附接到手柄,
111.其中,手柄包括开关,开关被配置成锁定和解锁手柄,
112.其中,手柄被配置为从打开位置旋转到关闭位置,
113.其中,轴被配置为与手柄一起旋转,并且
114.其中,不透射线材料附接到装置的外部。
115.在一些实施例中,不透射线材料以图案分散。
116.在一些实施例中,图案不是均匀的。
117.在一些实施例中,分散图案包括在装置的外部部分上的多个不透射线材料的沉积密度。
118.在一些实施例中,沉积密度的第一沉积密度与沉积密度的第二沉积密度不同。
119.在一些实施例中,图案包括至少一种形状。
120.在一些实施例中,至少一种形状可以是环形。
121.在一些实施例中,该环形可以是一个完整的环形。
122.在一些实施例中,该环形可以是一个开口的环形。
123.在一些实施例中,图案相对于涂抹器处于纵向构造。
124.在一些实施例中,握把手柄相对于轴自由地旋转。在一些实施例中,握把手柄被限制相对于轴旋转。在一些实施例中,握把手柄选择性地相对于轴自由旋转或者被限制相对于轴旋转。在一些实施例中,握把手柄可选的相对于轴自由旋转或者被限制相对于轴旋转独立于轴的纵向运动的限制。
125.在一些实施例中,导丝是弯曲的。
126.在一些实施例中,导管是弯曲的。
127.在一些实施例中,导管具有拉线,该拉线允许操纵导管远端的曲率。
128.在一些实施例中,轴包括允许控制手柄旋转的机构。
129.在一些实施例中,该装置包括锁定机构,该锁定机构被配置为选择性地锁定或解锁导管沿该装置的纵向轴线的运动,同时允许导管围绕纵向轴线旋转。
130.在一些实施例中,轴包括允许导管沿轴的侧面插入的凹槽。
131.在一些实施例中,该装置包括位于轴内的聚四氟乙烯管,以便保持导管并将导管引导到轴外。
132.在一些实施例中,为了控制装置远端的有效曲率,可以根据需要从导管中抽出导丝。在一些实施例中,该装置包括操纵器,操纵器被配置为控制导丝的运动。
133.在一些实施例中,导丝可以与导管分离。
134.在一些实施例中,导管可以与手柄分离。
135.在一些实施例中,手柄被配置为从连接器分离,而无需先从装置中取出导管和/或导丝。
136.在一些实施例中,连接器被配置为允许装置从支气管镜分离,而无需首先从装置中取出导管和/或导丝。
137.在一些实施例中,连接器包括鲁尔锁塞,该鲁尔锁塞被配置为定位在其中以便允许连接滑动末端或鲁尔锁注射器。
138.在一些实施例中,连接器包括鲁尔锁塞,该鲁尔锁塞被配置为定位在其中以便允许连接滑动末端或鲁尔锁注射器。
139.在一些实施例中,可以在没有导丝的情况下使用导管。
140.在一些实施例中,手柄具有被配置为提供数据存储和非接触式通信的组件。在一些实施例中,设备存储可以以非接触方式读取的唯一标识符(例如,通过射频识别或近场通信技术)。在一些实施例中,手柄包括具有通用计算、数据存储和无线通信能力的电子装置。在一些实施例中,唯一标识符存储在手柄中。在一些实施例中,手柄唯一标识符包括可由条形码阅读器读取的唯一条形码。在一些实施例中,条形码被压印在手柄上。在一些实施例中,条形码被压印在手柄包装上。在一些实施例中,条形码包含在产品标签中。
141.在一些实施例中,不透射线材料包括但不限于包括钡、碘或其任意组合的材料。在一些实施例中,两种或多种不透射线材料彼此结合使用。
142.图3a示出了示例性装置1的元件。在一些实施例中,装置1包括涂抹器10、导管11和导丝12。在一些实施例中,涂抹器10包括握把手柄13,其允许用户将握把手柄13从闭合(缩回)位置拉、推或旋转到打开(延伸)位置。在一些实施例中,涂抹器10包括涂抹器轴16,该涂抹器轴16允许握把手柄13沿涂抹器轴16(即,沿纵向轴线)滑动,同时避免涂抹器轴16和握把手柄13之间的相对旋转。在一些实施例中,涂抹器轴16包括内部通道,该内部通道被配置为接收导管11。因此,在一些实施例中,握把手柄13的旋转导致涂抹器轴16随之旋转。在一些实施例中,握把手柄13相对于轴16的旋转可以选择性地锁定或解锁,使得当解锁时,握把手柄13相对于轴16自由旋转。在一些实施例中,涂抹器10包括连接器元件15,其使得涂抹器10能够连接到任何市售的支气管镜。在一些实施例中,连接器元件15包括永久地连接到轴16的连接器部分40。在一些实施例中,连接器部分40被配置为将装置1连接到商用支气管镜。在一些实施例中,连接器部分40通过手动沿一个方向旋转旋转环43而连接到支气管镜,
从而将旋转环43朝向支气管镜移动并将连接器连接件44压靠在支气管镜上。在一些实施例中,为了将装置1从支气管镜上分离,在另一个方向上手动旋转旋转环43,从而将旋转环43从连接器连接件44移开并释放连接器连接件44对支气管镜的压力。
143.在一些实施例中,连接器元件15包括可与轴16分离的连接器部分41和可与轴16分离的连接器部分42。在一些实施例中,连接器部分41和连接器部分42可以通过位于轴16的远端32处的卡扣45连接到轴16。在一些实施例中,连接器部分41可以通过在支气管镜的入口端口上滑动连接器部分41来连接到市售的支气管镜。在一些实施例中,连接器部分41包括连接器滑动件47,该连接器滑动件47被配置成在支气管镜的入口端口上滑动,从而将连接器部分41锁定到支气管镜。在一些实施例中,连接器部分41包括释放按钮48,该释放按钮可操作以将连接器部分41从支气管镜中释放。在一些实施例中,连接器部分42包括连接器扣环46。在一些实施例中,连接器部分42可以通过靠着支气管镜的入口端口关闭连接器扣环46而连接到市售的支气管镜。在一些实施例中,通过打开连接器扣环46,连接器部分42可以从市售的支气管镜中移除。在一些实施例中,连接器部分41和连接器部分42可以在没有涂抹器10的情况下连接到支气管镜。
144.在一些实施例中,握把手柄13包括触发器14,该触发器14被配置为将握把手柄13锁定在沿着其在其打开位置和闭合位置之间的行程的任何位置(例如,沿着涂抹器轴16)。在一些实施例中,轴16的远端被配置为用作旋转件,其允许轴16和握把手柄13相对于连接器元件15沿着纵向轴线旋转到任何期望的角度。
145.图3b示出了图3a的装置1处于其打开(延伸)位置。连接器元件15从握把手柄13向远端延伸。图3c示出了图3b中的装置1处于其闭合(缩回)位置。连接器元件15最接近握把手柄13。图4a示出了图3a的装置1,其配置成导管11和导丝12都连接到握把手柄13。图4b示出了图4a的装置1,但是导丝12延伸。在一些实施例中,装置1包括线提取按钮33,其被配置为允许导丝12延伸。在一些实施例中,如图4b所示,导丝12是柔性的,并且可以根据需要定位。
146.图5示出了涂抹器10的爆炸图。握把手柄13分为两个侧部13a和13b。螺钉28被配置为将两个侧部13a和13b彼此连接。涂抹器10包括触发器14、操作杆17、铰链19和弹簧27,下面将参照图6a和6b对其进行详细描述。涂抹器10还包括入口管21,其被配置为接收导管11。
147.图6a示出了装置1,其中触发器14处于其解锁位置,其中轴16被允许相对于握把手柄13移动。图6b示出了装置10,触发器14处于其锁定位置,其中轴16被允许相对于握把手柄10移动。图7a示出了装置1的剖视图,其中触发器14处于其解锁位置。图7b示出了装置10的剖视图,其中触发器14处于其锁定位置。装置1包括锁定杆17,该锁定杆17与铰链19可枢转地接合。轴16具有凹槽部分20。触发器14具有倾斜表面18,其被配置为当触发器14处于其锁定位置时接合锁定杆17,并且当触发器14处于其解锁位置时脱离锁定杆17。当触发器14的倾斜表面18与锁定杆17接合时(例如,如图7b所示),锁定杆17围绕铰链19枢转到使得锁定杆17与轴16的凹槽部分20接合的位置,从而防止轴16相对于握把手柄13的轴向运动。相反,当触发器14的倾斜表面18脱离锁定杆17时(例如,如图7a所示),锁定杆围绕铰链19枢转到一个位置,使得锁定杆17不接触轴16的凹槽部分20,从而允许轴16相对于握把手柄13轴向移动。
148.图8a示出了在朝向握把手柄13远端的方向上握把手柄13的立体图。握把手柄13包括入口端口22,该入口端口22允许导管11插入涂抹器10。图8b示出了握把手柄13的一部分
的剖视图。握把手柄13包括入口管21,该入口管21从入口端口22延伸到轴16的内部通道,并被配置为允许导管11通过。
149.图9a和图9b示出了沿着轴16的开口24,该开口允许入口管21从其延伸位置(即,如图3b所示)滑动到其关闭位置(即,如图3c所示)。在一些实施例中,为了防止导管11和导丝12由于连接到装置1的支气管镜中的摩擦而弯曲并从轴16突出,聚四氟乙烯(“ptfe”,例如杜邦公司以商品名teflon出售的材料)管23定位在轴16内,以用作柔性屏障。在一些实施例中,ptfe管23围绕轴16定位,而不是在轴16内部。在一些实施例中,不是使用ptfe管23,而是使用弹簧、伸缩材料或其他能够承受屈曲力的柔性材料。图9a示出了处于延伸位置的ptfe管23。图9b示出了处于压缩位置的ptfe管23。在一些实施例中,ptfe管23在ptfe管23的远端处连接到连接器元件15并且在ptfe管23的近端处连接到入口管21。如图9b所示,当连接器元件15靠近握把手柄13定位时,ptfe管23被压缩。
150.图10示出了轴16的爆炸视图。在一些实施例中,轴16包括旋转机构。在一些实施例中,ptfe管23定位在轴16内以充当柔性屏障。在一些实施例中,轴远端32相对于轴16自由旋转。在一些实施例中,旋转机构还包括两个垫圈29和30以及提供对旋转控制的两个o形环31。在一些实施例中,轴远端32被配置成附接到连接器15。
151.图11a和图11b分别显示了线提取按钮33的剖视图和爆炸图。在一些实施例中,线提取按钮33压靠弹簧35,弹簧35将线提取按钮33偏压到线提取按钮33限制导丝12移动的位置。在一些实施例中,线提取按钮33可拆卸地连接到护套鲁尔锁入口34,该鲁尔锁入口34被配置为允许连接到注射器。在一些实施例中,线提取按钮33可以被移除以暴露护套鲁尔锁入口34。图12示出了涂抹器10的近端部分,其中护套鲁尔锁入口34暴露。
152.图13a示出了鲁尔锁塞36,其可以连接到连接器部分41或连接器部分42,以允许注射器连接到连接器15。图13b示出了连接到连接器15的鲁尔锁塞36。
153.在一些实施例中,连接器部分41包括集成的密封装置。图13c和图13d分别示出了具有集成密封装置的连接器部分41的组装图和爆炸图。在一些实施例中,密封装置包括上密封件1302和下密封件1304。在一些实施例中,上密封件1302被配置为允许用户在不存在导管时,执行流体的抽吸或流体的注射。在一些实施例中,下密封件1304被配置成在连接器部分41和支气管镜之间提供流体密封。在一些实施例中,该密封装置包括被配置为覆盖上密封件1302的密封盖1306。在一些实施例中,连接器部分41包括释放按钮1308,释放按钮1308可操作以从支气管镜释放连接器部分41。
154.在一些实施例中,本发明涉及装置上的不透射线图案,其中该不透射线图案可以被用户(例如,医生等)可视化,并用于识别在x射线图像上可见的装置的特定部分,例如通过将装置的部分与观察到的不透射线材料的密度相关联。在一些实施例中,不透射线材料位于装置1的导管11上。在一些实施例中,不透射线材料位于装置1的导丝12上。在一些实施例中,不透射线材料定位在装置1的导管11和导丝12两者上,它们协作以在装置1上产生不透射线材料的组合“有效”图案。
155.在一些实施例中,本发明的装置1具有不透射线材料,该不透射线材料定位在可以被观察到的图案中(例如,但不限于,使用装置的x射线图像),其中该图案是通过沿着该装置施加可变数量的不透射线材料来制造的。在一些实施例中,沿装置的不透射线材料密度的函数与x射线图像中灰度强度的函数之间的相关性允许在荧光图像上检测装置的特定部
分,尽管被图像上的其他不透射线物体部分遮挡。在一些实施例中,装置中不透射线材料的密度越高,x射线图像显现的灰度强度越低,反之亦然。图2a示出了不透射线材料密度沿着装置的一个实施例的长度(y轴)的图表,其相对于装置的长度(x轴)绘制。图2b示出了具有如图2a所示的材料密度的装置的一维灰度级(y轴),由荧光镜沿着装置的长度(x轴)成像。综合来看,图2a和2b表明,不透射线材料的密度与灰度图像函数相关。
156.图2c示出了从支气管镜突出的部分装置的一维灰度级(y轴)(与图2b相比,其示出了该装置的完整图像),由荧光镜沿着该装置的长度(x轴)成像。沿着x轴在x2和x3之间的零值表示在该间隔中阻挡x射线辐射的遮挡。图2d示出了部分成像装置(即,如图2c所示)和不透射线材料的密度(即,如图2a所示)之间的相关函数的绝对值。图2d中的峰值位置可用于计算图2c中的像素和图2a中的三维模型坐标之间的平移。图2e示出了x射线图像的表示,其示出了位于患者胸腔内的支气管镜241和具有不透射线材料的装置242(例如装置1)。在位置243,装置242被ecg贴片遮挡。
157.在一些实施例中,不透射线材料沿装置1以某种图案排列。在一些实施例中,图案包括围绕装置延伸的不同尺寸的环。在一些实施例中,图案包括沿装置不规则地间隔开的环。图2f示出了一个表格,该表格示出了包括不透射线材料的环的第一图案,这些环彼此间隔不同的距离并且具有不同的长度。图2i示出了一个表格,该表格示出了第二图案,该第二图案包括不透射线材料的环,这些环彼此间隔不同的距离并且具有不同的长度。对于本领域的技术人员来说显而易见的是,由图2f和图2i表示的特定图案仅仅是示例性的,其他图案也是可能的。
158.图2g示出了x射线图像的表示,示出了支气管镜261和装置262(例如装置1),其具有如图2a所示图案的不透射线材料。图2h示出了包含不同尺寸的环的不透射线材料的图案的图示,环沿着装置(例如装置1)的外部以不同的间隔放置在不同的位置。
159.在非限制性示例中,当不透射线材料的图案的一部分可见时,用户可以计算成像图案和密度函数之间的一维平移(例如,相关性)。装置的辐射不透明度和灰度级之间的关系可以用于此目的。在另一个非限制性示例中,用户可以使用模板匹配方法,该方法搜索图像中装置的可见部分的灰度级和装置的不透射线密度分布之间的最高相关性。这种方法对于由相对于从x射线管到图像增强器的投影方向而言位于装置后面或上方的物体引起的遮挡和噪声具有鲁棒性。在一些实施例中,图2d显示了如图2c所示的装置的部分图像和如图2a所示的装置的不透射线材料密度图案之间的示例性相关函数。例如,图2a中点x0处的密度函数到图2c中点x1处的像素灰度级之间的平移对应于图2d中所示相关函数中点x4处的峰值位置。结果,尽管如图2c所示的装置在点x2和x3之间的区域中部分可见且部分遮挡,但可以对图像进行装置定位,并将如图2d所示的可见装置的每个像素与如图2a所示的装置的已知模型相关联。
160.在一些实施例中,如图2h所示,通过将可变尺寸的不透射线的环在沿着装置的纵向轴的特定位置附接到装置,制造唯一的不透射线的图案。唯一的不透射线图案帮助用户估计成像装置的像素和预先设计的用于制造的装置模型之间的变换函数。可以通过找到满足由装置上不同标记大小和位置所施加的约束的函数来估计该变换函数。在图2f中提供了这种设计的非限制性示例,该示例对x射线图像上的几个标记的遮挡具有鲁棒性。
161.在一些实施例中,可以分析装置1(即,其包括不透射线材料)位于患者体内的患者
身体的至少一部分的医学图像(例如,x射线图像),以基于对不透射线材料的定位的了解来确定装置1在体内的深度。在一些实施例中,本发明涉及一种在这种情况下恢复三维深度信息的方法,其中由于作为输入的二维图像(例如x射线图像或视频图像序列)的遮挡和噪声,一些标记可能没借助于例如图2a中所示的装置上的唯一图案被检测到。如图2e所示,输入图像或视频图像序列的遮挡和噪声可能是由医疗装置、肋骨等高密度组织、患者起搏器、ecg电缆等的遮挡引起的。
162.图1示出了用于确定示例性(例如,图3a的装置1)的深度的过程的流程图。该过程接收沿装置的不透射线材料的密度模型(101)(例如,图2a中所示的信息)和位于患者体内的显示装置的荧光图像数据(102)作为输入。使用模板匹配方法(103)计算模型和图像像素之间的变换函数(104)。在一些实施例中,参照图2a-2d所述执行模板匹配方法。变换函数用于深度信息恢复(105)。
163.在一些实施例中,可以基于特定不透射线图案的物理尺寸的现有知识,从单个图像计算装置的深度。例如,给定在手术中图像中识别和定位的两个点之间的已知物理距离,我们可以确定这两点之间的相对深度。在一些实施例中,这种用于确定相对深度的技术如在公开号为wo/2015/101948的国际专利申请中所描述的那样执行,其内容通过整体引用并入本文。更具体地,在一些实施例中,具有已知长度“l3”并位于患者体内三维空间中的装置(例如,装置1)或其一部分(例如,图2h中所示的两个条纹之间的部分)被投影到成像平面中,以创建包括这种装置的投影图像。在二维成像平面中,同一装置(或装置部分)所观察到的(即投影)长度为“l2”。如公开号为wo/2015/101948的国际专利申请的图12所示,可以通过求解方程l2=l3cosα来确定装置(或装置部分)在空间中的角度α。通过计算d=l3sinα,可以确定两端之间的相对深度d。
164.在一些实施例中,可以使用公开为wo/2017/153839的国际专利申请中描述的方法来计算装置的深度,其内容通过引用的方式整体并入本文。在一些实施例中,根据以下过程执行这样的确定。在一些实施例中,该装置由手术中装置成像并投影到成像平面。在一些实施例中,装置上的两个不透射线区域“f”和“g”之间的预定距离“m”(例如,图2h中所示的两个条纹)被认为是输入。在一些实施例中,点“f”由两个可能的3d位置a和b的投影产生,这两个位置具有彼此不同的深度。在一些实施例中,点“g”来自彼此具有不同深度的两个可能深度位置c和d的投影,并且其中c对应于a且d对应于b。在一些实施例中,测量后投影位置对ac和bd之间的3d距离。在一些实施例中,将3d距离ac和bd与距离“m”进行比较,并且基于最佳拟合选择点a和c或者点b和d。在一些实施例中,深度是对应于所选位置对的深度。
165.在一些实施例中,可以使用已知的患者解剖结构和姿态估计方法的组合来执行深度恢复。在一些实施例中,唯一的不透射线图案的了解可以与患者的解剖支气管树的了解(例如,从术前图像提取的)和成像装置相对于患者的当前姿态的了解(例如,允许将3d信息从术前图像投影到从成像设装置获取的当前图像的视角)相结合。由于仪器位于离散的解剖空间内,当前的姿态估计信息可用于限制可能的解决方案。此外,仪器位置和支气管树上可能的解剖位置之间的匹配可以通过解决关于以下参数的优化问题来恢复:工具解剖位置的假设、姿态估计和潜在的3d解剖变化。在一些实施例中,这种方法在公开号为wo2015/101948的国际专利申请中有更详细的描述。
166.在一些实施例中,深度估计可以通过以下方式从两个或更多图像的序列中执行:
(a)找到视图之间的对应点,例如,通过视觉相似性进行跟踪或匹配;(b)使用例如夹具、人体解剖学或任何其他姿态估计算法(例如,在公开号为wo/2017/153839的国际专利申请中描述的那些)来寻找姿态相对差异;(c)使用本领域已知的方法(例如三角测量、基于立体对应点的技术、非立体对应轮廓方法、表面渲染)从具有已知姿态的多个图像中重建匹配点的三维信息技术等。
167.在一些实施例中,与典型方法相比,该装置在体腔(例如但不限于支气管气道)内提供增加的可操作性。在一些实施例中,该装置如图3a-13b所示的非限制性示例所示。在一些实施例中,示例性装置允许用一只手导航时提高准确性,且支持标准诊断和治疗装置从另一只手进入。在一些实施例中,导丝是预弯曲的。在一些实施例中,导管是预弯曲的。在一些实施例中,导丝和导管都是预弯曲的。在一些实施例中,导丝是直的。在一些实施例中,导管是直的。在一些实施例中,导丝和导管都是直的。在一些实施例中,导丝被配置成根据需要弯曲。在一些实施例中,导管被配置成根据需要弯曲。在一些实施例中,导丝和导管都被配置成根据需要弯曲。在一些实施例中,导丝被配置成突出超过导管的尖端,同时给装置增加额外的弯曲。该特征允许在肺内部导航期间增加装置的可操作性。
168.在一些实施例中,包括不透射线材料的装置包括内窥镜、支气管内工具和/或机械臂。
169.在一些实施例中,导管具有可操纵的护套,该护套被配置为将对象(例如,内治疗附件、超声探头等)引导至目标区域。在一些实施例中,目标区域在呼吸系统内。在一些实施例中,可操纵护套包括被配置为允许用户操纵和控制护套远端(例如,定位在体内的端部)的机构。在一些实施例中,可操纵护套被配置为具有允许护套远端锁定在期望位置的机构。在一些实施例中,可操纵护套包括沿护套长度的一个或多个不透射线标记。在一些实施例中,不透射线标记允许确定和/或在增强图像上显示护套在患者体内的位置。在一些实施例中,不透射线标记沿着护套以不透射线标记的预先设计图案定位。
170.在一些实施例中,护套包括被配置成允许护套附接到手柄和从手柄分离的机构。在一些实施例中,护套的尺寸足够大以允许将物体(例如,内治疗附件、超声探头等)引入其中。在一些实施例中,护套的尺寸足够大以通过标准支气管镜引入。在一些实施例中,护套具有鲁尔锁机构以允许注射器连接以允许注射和抽吸流体。在一些实施例中,护套被配置成在单个患者身上多次使用。
171.图14和图15示出了示例性装置1400立体图,包括控制部分1410和可操纵护套1420。图14示出了定位在释放配置1420a中的可操纵护套1420。图15示出了定位在活动配置1420b中的可操纵护套1420。
172.图16a示出了图14和图15的示例性装置1400的爆炸图。图17a和图17b分别示出了处于活动配置和释放配置的图14和15的示例性装置1400的剖视图。在一些实施例中,可操纵护套1420包括延伸穿过可操纵护套1420到可操纵护套1420的远端1608的拉线1606。在一些实施例中,拉线1606允许操纵可操纵护套1607的远端1608的曲率。
173.在一些实施例中,控制部分1410包括容纳在壳体1601内的可操纵机构。在一些实施例中,可操纵机构包括转向杆1602、转向轴1603、定位在转向轴1603内的拉线锁定轴1604和锁定旋钮1605。在一些实施例中,与可操纵护套1420的远端1608相对的拉线1606的一端固定到拉线锁定轴1604。在一些实施例中,转向杆1602的运动(例如,在图14所示的位置和
图15所示的位置之间,导致转向轴1603在壳体1601内移动,导致拉线锁定轴1604和拉线1606的相应运动。在一些实施例中,可操纵机构被配置成使得转向杆1602可以移动以使可操纵护套1420的远端偏转或拉直到所需的角度,从而允许操纵可操纵护套1420的远端1608的曲率。
174.在一些实施例中,控制部分1410还包括锁定机构。在一些实施例中,具有锁定腔的锁定旋钮1605形成在壳体1601上。在一些实施例中,转向杆1602可以选择性地锁定到锁定旋钮1605的锁定腔,从而锁定或解锁可操纵护套1420的远端1608的运动,同时允许可操纵护套1420绕其纵向轴线旋转。
175.在一些实施例中,装置1400包括手柄连接机构1610,该手柄连接机构1610被配置为允许护套连接到手柄(例如,图3a所示的涂抹器10的手柄)或从手柄分离。图18显示了被连接到图3a中所示的涂抹器10的手柄上的装置1400的顺序视图。图19示出了连接到图3a中所示的涂抹器10的手柄的装置1400,其中连接器元件15定位在缩回位置或延伸位置。
176.在一些实施例中,可操纵护套1420具有足够薄的壁以允许护套被引入具有直径为2.8mm的工作通道的标准支气管镜中并且能够在其中接收和引导指示适合内径2.0毫米工作通道的内治疗附件。
177.在一些实施例中,装置1400包括鲁尔锁机构1611,该鲁尔锁机构1611被配置为允许注射器连接到可操纵护套1420。
178.图16b和图16c从各自不同的角度示出了包括示例性手柄连接机构1650和可操纵护套1420的示例性装置1648的爆炸图。在一些实施例中,手柄连接机构1650类似于手柄连接机构1610,后文所述除外。在一些实施例中,手柄连接机构1650包括转向杆1652,该转向杆1652类似于转向杆1602,后文所述除外。在一些实施例中,手柄连接机构1650包括拉线锁定轴1654,该拉线锁定轴1654连接到转向杆1652和拉线1606,并且以类似于上述拉线锁定轴1604的方式操作。在一些实施例中,手柄连接机构1650包括与上述锁定旋钮1605相似的锁定旋钮1656。在一些实施例中,手柄连接机构1650包括鲁尔锁机构1658,该鲁尔锁机构1658被配置为允许注射器连接到可操纵护套1420。在一些实施例中,手柄连接机构1650包括具有锁定齿1662的位置锁定器1660。在一些实施例中,位置锁定器1660连接到转向杆1652,并且可相对于转向杆1652横向滑动。在一些实施例中,手柄连接机构1650包括拉/推线保护器1664,其覆盖柔性拉线1606并允许拉线1606被推拉而不弯曲,从而保护拉线1606免于疲劳失效。
179.图17c和图17d分别示出了装置1648的立体图和侧视图,其中转向杆1652被定位以便将装置1648置于释放配置中。图17e示出了装置1648的侧视图,其中转向杆1652被定位以便将装置1648置于活动配置中。图17f示出了装置1648的立体图,其中转向杆1652被定位以便将装置1648置于活动配置中并且位置锁定器1660被定位在解锁位置。图17g示出了装置1648的局部剖视图,其中转向杆1652和定位锁1660如图17f所示定位。在图17g的局部剖视图中,省略了转向杆1652的一部分,以示出在解锁位置,锁定齿1662位于锁定旋钮1656的侧面,并且不与锁定旋钮1656接合,从而使得转向杆1652能够移动。图17h示出了装置1648的立体图,其中转向杆1652被定位以便将装置1648置于活动配置中并且位置锁定器1660被定位在锁定位置。图17i示出了装置1648的局部剖视图,其中转向杆1652和位置锁定器1660如图17h所示定位。在图17i的局部剖视图中,省略了转向杆1652的一部分,以示出在锁定位
置,锁定齿1662接合锁定旋钮1656,从而防止转向杆1652移动。
180.在一些实施例中,可操纵护套1420包括不透射线标记1609。在一些实施例中,不透射线标记1609以图案定位。在一些实施例中,不透射线标记1609的图案包括围绕可操纵护套1420延伸的不同尺寸的环。在一些实施例中,不透射线标记1609的图案包括沿可操纵护套1420不规则地间隔开的环。在一些实施例中,不透射线标记1609的图案包括围绕可操纵护套1420延伸的不同形状的环,使得可操纵护套1420的3d曲率可以从单平面x射线快照中识别。
181.在一些实施例中,不透射线标记1609的图案允许从单个荧光图像在六个自由度上导出护套及其尖端(包括滚动)的位置。在一些实施例中,该图案包括沿编织物附接的多个标记物1609,该编织物沿可操纵护套1420螺旋地延伸。图23示出了示例性编织物2300,其中一个不透射线标记1709沿着该编织物定位。对于本领域技术人员来说显而易见的是,虽然图23示出了具有一个不透射线标记1709的编织物2300,但这仅仅是说明性的,实际的实施将包括几个不透射线标记1609。在一些实施例中,不透射线标记以预定距离附接到编织物2300,从而形成不在同一平面内的点的3d结构。在一些实施例中,知道至少四个标记1609的3d配置允许以六个自由度估计护套的姿态。在一些实施例中,使用少于四个标记本身不会提供唯一的姿态,但是可以通过用其他信息源进行补偿来确定唯一的姿态。在一些实施例中,实时了解护套的姿态(例如,位置和方向)是有帮助的,因为这种知识引导医生如何操纵工具以将其定位在目标附近。在一些实施例中,这样的引导可以包括推动和/或拉动护套以及通过旋转护套来改变尖端定向的方向。
182.在一些实施例中,可操纵护套包括中心腔、用于在体内操纵导管的手柄、至少一根拉线、被配置为使至少一根拉线移位的机构,以及可操纵护套上的不透射线图案。
183.在一些实施例中,至少一根拉线的移动可以由电动机控制。在一些实施例中,电动机集成在手柄内部。在一些实施例中,电动机附接到手柄。在一些实施例中,电机通过位于手柄上的控件来控制。在一些实施例中,位于手柄上的控件包括按钮和/或操纵杆中的至少一个。在一些实施例中,电机可由位于手柄内的控制器来控制,并被配置为接收来自内部装置的指令。在一些实施例中,控制器被配置为通过有线连接接收指令。在一些实施例中,控制器被配置为通过无线连接接收指令。在一些实施例中,手柄包括电源。在一些实施例中,手柄包括与外部电源的连接。在一些实施例中,手柄包括电池。在一些实施例中,手柄包括被配置为无线充电的储能元件。
184.在一些实施例中,提供了一种方法,用于沿着体腔内的规划路径对可操纵可追踪导管进行反馈回路导航和引导。在一些实施例中,为了将可操纵的可追踪仪器准确地导航到移动且动态变化的体腔内的期望位置(例如,支气管气道的结构),示例性实施例在连续反馈回路中向用户提供实时引导。在这样的实施例中,实时增强成像,例如增强荧光透视,充当实时导航模态。在一些实施例中,实时荧光透视图像提供关于被导航的仪器相对于程序增强信息的位置的信息。在一些非限制性示例中,这样的程序性增强信息可以包括突出显示的目标区域、路径、分叉处、相邻气道和/或血管,它们中的任何一个都可以用来提供对仪器定位的引导。在一些实施例中,通过使用这种引导,可以使用推和扭方法从患者体外操作简单的仪器,并且可选地,操纵仪器的远端区域。在一些实施例中,仪器的操作是手动的。在一些实施例中,仪器的操作是机动化的(例如,使用机械臂)。在一些实施例中,连续反馈
回路通过将真实目标位置(例如,相对于计算位置的实际位置)馈送到提供增强图像数据作为附加加权数据用于术前和术中成像调制之间的配准的系统中,提高增强图像上目标定位和可视化的精度。在一些实施例中,通过诸如但不限于从诸如c形臂、计算机断层摄影(“ct”)或锥形束计算机断层摄影(“cbct”)的x射线设备获得的断层摄影病变重建,或从由径向支气管内超声(“rebus”)探头获得的超声图像数据重建的技术,周期性地获取真实目标位置。
185.在一些实施例中,可以通过允许在单个平面中部分可操纵的仪器尖端操作或允许在所有方向上可操纵的仪器尖端操作来部分或完全避免扭矩(例如,仪器的滚动)。在一些实施例中,可以通过在护套壁内使用一根或两根拉线来实现单平面可操纵机构。在一些实施例中,可以使用护套壁内的四根拉线来实现全方位可操纵机构。
186.在一些实施例中,实时成像模态上的引导可以是诸如在公开号为wo/2015/101948的国际专利申请中描述的增强覆盖的形式。
187.在一些实施例中,将仪器导航到目标需要在到达目标的途中导航经过多个分叉。每个这样的分叉都有它自己相应的三维解剖结构。图20示出了代表性分叉的解剖结构。在一些实施例中,当仪器通过腔a接近分叉处时,存在诸如c臂之类的成像装置的最佳姿态,这将使管腔b和c的投影之间的表观角度最大化。在一些实施例中,示例性方法计算这样的最佳姿态并使用最佳姿态来导航仪器。
188.图21示出了这种示例性方法的流程图。在步骤2110中,导航引导显示在实时成像模态(例如,术中图像)上。在步骤2120中,针对到感兴趣区域的路径的给定部分(例如,分叉)触发导航迭代。在步骤2130中,计算成像装置的最佳姿态,以便提供相关解剖结构的最佳视图(例如,以便最大化如图20所示的腔b和c之间的表观视角)。在步骤2140中,基于在步骤2130中计算的最佳姿态调整成像装置(例如,术中成像模态)。在步骤2150中,在调整成像装置之后获得至少一个附加图像。在步骤2160中,计算仪器尖端(例如,如上所述的可操纵套筒1420的远端1608的)所需的角度变化量。在步骤2170中,调整仪器尖端的方向(例如,通过使用拉线1606来调整如上所述的可操纵套筒1420的远端1608的位置)。在步骤2180中,仪器被突出以沿着路径的以下部分滑动。在步骤2180之后,该方法返回到步骤2120,并且根据需要触发后续迭代,直到仪器已经到达感兴趣的区域。
189.在一些实施例中,一种在体腔内导航仪器(例如,支气管内仪器)的方法包括以下步骤:(1)显示实时成像模态的指导;(2)动态地或以离散方式对路径的每个部分执行以下步骤:(a)如果需要,建议改变成像装置的姿态,以获得相关解剖结构(例如计划路径的一部分或仪器附近的血管)的最佳可视性,(b)建议改变仪器尖端弯曲角度,以与路径的后续部分对准,以及(c)突出仪器,以沿着路径的后续部分滑动。
190.在一些实施例中,可操纵机构的控制部分是圆形的。图22a-22f图示了圆形的控制部分的实施例的元件和操作。图22a示出了示例性控制部分2200。图22b示出了示例性控制部分2200的爆炸图。在一些实施例中,控制部分2200包括由手柄侧2202、2204形成的手柄2202。在一些实施例中,控制部分2200包括保持在手柄侧2202、2204之间的鲁尔连接件2208。在一些实施例中,控制部分2200包括保持在手柄侧2202、2204之间并与手柄侧2202、2204的内螺纹螺纹接合的推/拉转环2210。在一些实施例中,控制部分2200包括线保护器2212。在一些实施例中,如图22a和图22b所示,拉线1606被附接到推/拉转环2208上。在一些
实施例中,当使用者旋转控制部分2200的手柄2202时,由于推/拉转环2210与手柄2202的螺纹接合,导致推/拉转环2210沿着手柄连接机构1610向上或向下移动,从而拉动或释放拉线1606,并如上所述偏转或释放拉线1606的远端。在一些实施例中,推/拉转环2210由位于手柄连接机构1610中的突起内部的凹口固定,从而仅允许沿着手柄连接机构1610纵向移动,并且防止相对于手柄连接机构1610旋转。在一些实施例中,鲁尔接头2208连接到护套的工作通道上,以使内治疗工具能够被引入护套的工作通道中。在一些实施例中,线保护器2212覆盖柔性拉线,并允许推拉拉线而不弯曲,从而防止拉线疲劳失效。图22c示出了手柄2200的剖视图,推/拉转环2210位于手柄2202最靠近手柄连接机构1610的一端,其中拉线1606未被拉动,护套因此位于释放位置。图22d示出了手柄2200的剖视图,其中推/拉转环2210位于手柄2202的离手柄连接机构1610最远的一端(例如,手柄2202已经旋转,使得推/拉转环2210沿着手柄2202从图22c所示的位置移动),其中拉线1606已经被拉向手柄2202,从而护套位于活动位置。在某些情况下,仪器可以放置在感兴趣的区域,但不是在最佳位置。例如,医生可能有兴趣让仪器的尖端准确地指向目标的中心(例如,最佳位置准确地指向目标的中心),以便将针头推过护套和进入目标内部。在一些实施例中,可以使用基于诸如荧光透视的实时成像模态的方法来估计仪器相对于目标的当前3d位置。在一些实施例中,位置估计的方法可以包括但不限于如公开号为wo/2017/153839的国际专利申请中所述的从多个平面进行立体估计。此外,位置估计可以包括但不限于基于计算断层摄影的方法,例如cbct或有限角度断层摄影,如公开号为wo/2020/035730的国际专利申请中所述,其内容通过引用全部并入本文。在一些实施例中,仪器包括用于估计3d仪器位置的不透射线标记(例如,定位在仪器内、定位在仪器表面上等)。
191.在一些实施例中,动态迭代仪器对准的方法包括以下步骤:(1)使用实时成像估计仪器相对于目标的3d位置;(2)根据仪器相对于目标的估计3d位置计算所需的滚动量和尖端的曲率变化;(3)改变滚动和仪器尖端的方向;(4)使用实时成像估计仪器相对于目标的3d位置以进行验证和额外的迭代(例如,如果需要,重复步骤(2)和(3))。
192.在一些实施例中,基于实际尖端位置和方向的了解,向用户提供关于如何将偏离所需轨迹的偏差转换为给用户的一个或多个指令的一个或多个指令。在一些实施例中,这样的指令可以包括但不限于(1)需要施加到仪器上的滚动的方向和量;(2)可操作尖角的变化方向和量;(3)沿仪器纵轴所需的移动量;和/或(4)在仪器的逐渐旋转过程中已经实现充分旋转的定性指示。
193.在一些实施例中,为了简化工具控件的操作,例如改变工具尖端偏转角的控件,这些控件具有离散的位置,在这些位置之间具有预定义的间隔或跳跃(例如,点击)。
194.在一些实施例中,对于涉及无线导航的应用,仅使用护套。在一些实施例中,具有保持打开的中心腔的护套对于同时使用额外的支气管内工具是有用的。例如,径向支气管内超声(“rebus”)探头可以在引导护套时定位在护套内,以便快速验证体内的位置,而不需要将其拉出进行重新引导。
195.如本领域技术人员所知,当使用可操纵的预弯曲导管,例如中空护套或延伸的工作通道时,将仪器放置在这样的导管内可以加强导管的尖端,从而在导航期间改变尖端的方向。通过使用可操纵的柔性导管实施的示例性实施例通过根据需要改变导管的弯曲角度的能力来改善这种缺陷。例如,可以将针保持在这种护套内,同时将护套对准目标。结果,在
实现期望的对准之后,针可以容易地拔出。
196.虽然已经描述了本发明的多个实施例,但是应该理解,这些实施例仅仅是说明性的,而不是限制性的,并且许多修改对于本领域普通技术人员来说是显而易见的。此外,可以以任何期望的顺序执行各个步骤(并且可以添加任何期望的步骤和/或可以去除任何期望的步骤)。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。