1.本技术涉及机械加工领域,尤其涉及一种上下料装置。
背景技术:
2.在机械加工领域,自动化及半自动化一直是热门的议题,通过合理地将多功能组件进行配合可以使多个存在逻辑关联的工艺流程实现自动或半自动地串接,进而降低人力成本,提升生产效率。例如,对于物料进行打磨抛光过程中,往往需要将待打磨的物料放置于治具并使用机械臂操作打磨件对物料进行打磨,完成打磨后进一步需要从治具中取出完成加工的物料,并将另一待加工物料放入治具中进行加工;其中,现有技术中心,对于物料的取放及治具的开合均需要人工完成,使得整个步骤效率较低,且存在工人被误伤的可能。如何解决上述问题,提供一种自动化程度较高的拿取装置整合方案是本领域技术人员需要考虑的。
技术实现要素:
3.有鉴于此,本技术提供一种上下料装置,可以实现拿取物料及开合治具盖板的功能,使拿料、换料、放料的工艺实现自动化,可有效削减人力成本、提高生产效率。
4.本技术提供一种上下料装置,包括:
5.吸取组件,包括吸盘固定板及吸盘,所述吸盘连接于所述吸盘固定板;
6.夹取组件,包括第一夹取件、第二夹取件以及驱动件,所述驱动件用于驱动所述第一夹取件及所述第二夹取件沿第一方向运动,从而使所述第一夹取件及所述第二夹取件之间的距离沿第一方向增大或减小;所述第一夹取件包括第一滑动连接块及两个第一夹爪,两个所述第一夹爪间隔设于所述第一滑动连接块,所述第一滑动连接块与所述驱动件连接;所述第二夹取件包括第二滑动连接块及两个第二夹爪,两个所述第二夹爪间隔设于所述第二滑动连接块,所述第二滑动连接块与所述驱动件连接;
7.其中,所述吸取组件与所述夹取组件通过一连接板固定连接。
8.在一种可能的实施方式中,所述夹取组件还包括驱动固定板,所述驱动件与所述驱动固定板连接,所述第一夹取件及所述第二夹取件设于所述驱动固定板远离所述驱动件一侧。
9.在一种可能的实施方式中,所述夹取组件还包括限位件,所述限位件包括沿所述第一方向设置的第一凸起部及第二凸起部,所述第一凸起部及所述第二凸起部间隔设置,所述第一夹取件及所述第二夹取件设于所述第一凸起部及所述第二凸起部之间。
10.在一种可能的实施方式中,第一夹爪由所述第一滑动连接块向远离所述驱动件的方向凸伸设置,所述第二夹爪自所述第二滑动连接块向远离所述驱动件的方向凸伸设置;沿所述第一方向,所述第一夹爪设于所述第一滑动连接块远离所述第二夹取件一侧,所述第二夹爪设于所述第二滑动连接块远离所述第一夹取件一侧。
11.在一种可能的实施方式中,所述吸盘开设有第一开口及第二开口,所述第一开口
设于所述吸盘与所述吸盘固定板的连接处,所述第一开口及所述第二开口通过气腔连通。
12.在一种可能的实施方式中,吸盘固定板开设有气道,所述气道通过所述第一开口与所述气腔连通。
13.在一种可能的实施方式中,还包括防呆检测组件,所述防呆检测组件包括连接支架及距离感测件,所述距离感测件通过所述连接支架与所述夹取组件连接,所述距离感测件用于感测所述上下料装置到待测位置的距离。
14.在一种可能的实施方式中,还包括转接块,所述转接块与所述夹取件连接,所述转接块设于所述驱动件远离所述第一夹取件或所述第二夹取件一侧,所述转接块用于使所述上下料装置与一外接机械臂连接。
15.相较于现有技术,本技术的上下料装置通过设置具有吸盘的吸取组件,可借助负压吸附的方式实现对治具等装置的外壳(盖板)的拿取,进而实现对治具或载具的开合,以便于后续物料的取放;本技术的上下料装置通过驱动件与第一夹取件及第二夹取件的配合,使得第一夹取件及第二夹取件通过调整距离实现对不同尺寸物料的固定及夹取,进而实现物料的取放或交换等功能。
附图说明
16.图1为本技术实施例提供的上下料装置沿侧视角度的立体示意图。
17.图2为本技术实施例提供的上下料装置沿仰视角度的立体示意图。
18.图3为本技术实施例提供的上下料装置对物料进行夹取时夹取组件的平面状态示意图。
19.图4为本技术实施例提供的上下料装置通过转接块与机械臂配合的示意图。
20.主要元件符号说明
21.上下料装置
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
10
22.夹取组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11
23.第一夹取件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111
24.第一滑动连接块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1111
25.第一夹爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1112
26.第二夹取件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
112
27.第二滑动连接块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1121
28.第二夹爪
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
1122
29.驱动件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
113
30.驱动固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
114
31.限位件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
115
32.第一凸起部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
116
33.第二凸起部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
117
34.行程调节件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
118
35.吸取组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12
36.吸盘固定板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
121
37.吸盘
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
122
38.气道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
123
39.第一开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
124
40.第二开口
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
125
41.气腔
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
126
42.防呆检测组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
13
43.连接支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131
44.距离感测件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132
45.连接板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14
46.转接块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15
47.第一端部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
151
48.第二端部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
152
49.机械臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
20
50.第一方向
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
x
51.如下具体实施方式将结合上述附图进一步说明本技术。
具体实施方式
52.以下描述将参考附图以更全面地描述本技术内容。附图中所示为本技术的示例性实施例。然而,本技术可以以许多不同的形式来实施,并且不应该被解释为限于在此阐述的示例性实施例。提供这些示例性实施例是为了使本技术透彻和完整,并且将本技术的范围充分地传达给本领域技术人员。类似的附图标记表示相同或类似的组件。
53.本文使用的术语仅用于描述特定示例性实施例的目的,而不意图限制本技术。如本文所使用的,除非上下文另外清楚地指出,否则单数形式“一”,“一个”和“该”旨在也包括复数形式。此外,当在本文中使用时,“包括”和/或“包含”和/或“具有”,整数,步骤,操作,组件和/或组件,但不排除存在或添加一个或多个其它特征,区域,整数,步骤,操作,组件,组件和/或其群组。
54.除非另外定义,否则本文使用的所有术语(包括技术和科学术语)具有与本技术所属领域的普通技术人员通常理解的相同的含义。此外,除非文中明确定义,诸如在通用字典中定义的那些术语应该被解释为具有与其在相关技术和本技术内容中的含义一致的含义,并且将不被解释为理想化或过于正式的含义。
55.以下内容将结合附图对示例性实施例进行描述。须注意的是,参考附图中所描绘的组件不一定按比例显示;而相同或类似的组件将被赋予相同或相似的附图标记表示或类似的技术用语。
56.下面参照附图,对本技术的具体实施方式作进一步的详细描述。
57.如图1所示,为本技术实施例提供的上下料装置10沿侧视角度的立体示意图;如图2所示,为本技术实施例提供的上下料装置10沿仰视角度的立体示意图;由于图中存在视角遮挡,故结合图1及图2进行说明。
58.本技术实施例提供一种上下料装置10,包括夹取组件11、吸取组件12以及防呆检测组件13,吸取组件12以及防呆检测组件13连接于夹取组件11。吸取组件12与夹取组件11通过一连接板14固定连接,使得夹取组件11与吸取组件12在保持连接的同时可具备一定的
间隔距离,避免工作过程中夹取组件11与吸取组件12之间的干涉。
59.其中,夹取组件11可用于夹取物料以实现物料的转移;吸取组件12可用于吸取并固定治具或载具的外盖以实现对治具或载具的开合,进而协助夹取组件11实现物料在治具与载具之间的转移;防呆检测组件13用于在夹取组件11及吸取组件12进行工作前,至少对治具及载具的型号、以及物料的型号及摆放方式进行检验。
60.夹取组件11包括第一夹取件111、第二夹取件112以及驱动件113,驱动件113与第一夹取件111及第二夹取件112传动连接,驱动件113用于驱动第一夹取件111及第二夹取件112沿第一方向x运动,从而使第一夹取件111及第二夹取件112的间距沿第一方向x增大或减小,从而使得第一夹取件111及第二夹取件112可相互分离或者靠近。进一步的,驱动件113驱动第一夹取件111及第二夹取件112沿第一方向x向相反的方向运动,第一夹取件111及第二夹取件112分离以固定物料,第一夹取件111及第二夹取件112靠近以松开物料。
61.吸取组件12包括吸盘固定板121及吸盘122,吸盘122连接于吸盘固定板121。进一步的,吸盘122可用于与治具或载具的外盖接触,在吸盘122与所述外盖的接触面产生吸力以吸附所述外盖。
62.本技术的上下料装置10通过设置具有吸盘122的吸取组件12,可借助负压吸附的方式实现对治具等装置的外壳(盖板)的拿取,进而实现对治具或载具的开合,以便于后续物料的取放。本技术的上下料装置10,通过驱动件113与第一夹取件111及第二夹取件112的配合,使得第一夹取件111及第二夹取件112通过调整距离实现对不同尺寸物料的固定及夹取,进而实现物料的取放或交换等功能。
63.于一实施例中,夹取组件11还包括驱动固定板114,驱动件113与驱动固定板114连接,第一夹取件111及第二夹取件112设于驱动固定板114远离驱动件113一侧。
64.在本实施例中,驱动固定板114可用于与连接板14固定连接,驱动件113及连接板14可设于驱动固定板114相背的两侧。驱动件113可以电机、气缸等具备较高控制精度的驱动机构,以实现精准夹取。
65.进一步的,驱动固定板114用于承载驱动件113,并使夹取组件11通过驱动固定板114及连接板14与吸取组件12连接,进而实现吸取与夹取的连贯性。
66.于一实施例中,夹取组件11还包括限位件115,限位件115包括沿第一方向x间隔设置的第一凸起部116及第二凸起部117,第一凸起部116及第二凸起部117间隔设置,第一夹取件111及第二夹取件112设于第一凸起部116及第二凸起部117之间,限位件115用于限制第一夹取件111及第二夹取件112在第一方向x上的行程范围。具体的,第一凸起部116及第二凸起部117相较于第一夹取件111及第二夹取件112的移动轨道凸起,使得第一夹取件111及第二夹取件112分别运动至于第一凸起部116及第二凸起部117接触时,可因物理阻挡而停止。
67.进一步的,限位件115还包括行程调节件118,行程调节件118设于第一凸起部116或第二凸起部117的至少一个上,行程调节件118用于与第一夹取件111、第二夹取件112、驱动件113配合以实现对第一夹取件111及第二夹取件112行程的调节。行程调节件118可以为丝杠、螺纹组件等可进行距离微调的机械件。
68.于一实施例中,第一夹取件111包括第一滑动连接块1111及两个第一夹爪1112,两个第一夹爪1112间隔设于第一滑动连接块1111上,第一滑动连接块1111与驱动件113连接。
第二夹取件112包括第二滑动连接块1121及两个第二夹爪1122,两个第二夹爪1122间隔设于第二滑动连接块1121上,第二滑动连接块1121与驱动件113连接。
69.于一实施例中,第一夹爪1112自第一滑动连接块1111向远离驱动件113的方向凸伸设置,第二夹爪1122自第二滑动连接块1121向远离驱动件113凸伸设置。沿第一方向x,第一夹爪1112设于第一滑动连接块1111远离第二夹取件112一侧,第二夹爪1122设于第二滑动连接块1121远离第一夹取件111一侧。
70.进一步的,间隔的第一夹爪1112及第二夹爪1122朝向远离连接板14的方向延伸,即,第一夹爪1112及第二夹爪1122可设为朝向物料的方向延伸;驱动件113通过第一夹取件111及第二夹取件112沿第一方向x运动,使得第一夹爪1112与第二夹爪1122沿第一方向x的距离变大或变小。
71.进一步结合图3所示,在本实施例中,夹取组件11可通过将第一夹爪1112及第二夹爪1122伸入物料(图未示)内部,然后驱动件113驱动第一夹取件111及第二夹取件112沿第一方向x逐渐远离,使第一夹爪1112与第二夹爪1122之间的距离增大,使第一夹爪1112及第二夹爪1122从多个方向在物料内部撑住物料的内壁,进而实现对物料的夹取固定。对应的,物料被转移至待测位置(治具或载具)后,驱动件113驱动第一夹取件111及第二夹取件112沿第一方向x逐渐靠近,使第一夹爪1112与第二夹爪1122之间的距离减小,第一夹爪1112及第二夹爪1122与物料分离。
72.如图1及图2所示,于一实施例中,吸盘固定板121开设有气道123,吸盘122开设有第一开口124及第二开口125,第一开口124设于吸盘122与吸盘固定板121的连接处,第一开口124及第二开口125通过气腔126连通,气道123通过第一开口124与气腔126连通。
73.在本实施例中,吸盘122的数量为两个,两个吸盘122间隔设于吸盘固定板121远离连接板14一侧;第一开口124的尺寸小于第二开口125的尺寸,第二开口125用于与待吸附物体接触以提供更大的吸力。气腔126通过第一开口124及气道123与一外接的负压产生装置连通,以使第二开口125处形成负压从而提供吸力。
74.于一实施例中,防呆检测组件13包括连接支架131及距离感测件132,距离感测件132通过连接支架131与夹取组件11连接,距离感测件132用于感测上下料装置10与待测位置的距离。
75.在本实施例中,距离感测件132为光学感测器。防呆检测组件13至少可用于检测料盘的型号(不同型号具备不同的外形)及物料摆放的正反(物料为非对称结构)。具体的,对于料盘及物料进行检测时,距离感测件132依据预设的检测路径依次到达多个检测点并检测该检测点下距离感测件132至料盘或物料的距离,将该距离信息与预设值进行比较,若一致则判定为正确,若不一致则判定为错误。
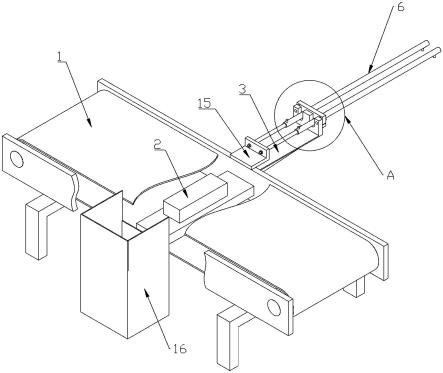
76.如图4所示,为本技术实施例提供的上下料装置10通过转接块15与机械臂20配合的示意图。于一实施例中,上下料装置10还可以包括转接块15,转接块15与夹取组件11连接,转接块15设于驱动件113远离第一夹取件111或第二夹取件112一侧,转接块15用于使上下料装置10与外接的机械臂20连接。
77.进一步的,转接块15包括第一端部151及第二端部152,第一端部151用于与上下料装置10连接,第二端部152用于与机械臂20连接,通过改变第二端部152的形貌、尺寸、连接适配方式等,是转接块15可适配不同型号的机械臂20,进而提升上下料装置10的通用性。
78.对于本技术的上下料装置10,机械臂20驱动上下料装置10在用于加工物料的治具及用于承载物料的载具之间移动以完成物料的取放及转移。
79.首先,载具来料,防呆检测组件13的距离感测件132靠近载具,距离感测件132依据预设的检测路径依次到达多个检测点并检测该检测点下距离感测件132至料盘或物料的距离,将该距离信息与预设值进行比较,通过信息比对识别料盘的型号及物料的摆放方向,并进一步将检测结果回传至上下料装置10及机械臂20,使上下料装置10依照料盘的型号及物料的摆放方向选择对应的拿取方案,避免对载具及物料造成损坏或因抓取失败使加工停止。
80.进一步的,夹取组件11转移至载具处,使第一夹爪1112及第二夹爪1122伸入物料内部,然后驱动件113驱动第一夹取件111及第二夹取件112沿第一方向x逐渐远离,使第一夹爪1112与第二夹爪1122之间的距离增大,从而第一夹爪1112及第二夹爪1122从多个方向在物料内部撑住物料的内壁,进而实现对物料的夹取固定。
81.进一步的,机械臂20带动上下料装置10移动至治具处,使吸取组件12接触治具,使吸盘122的第二开口125与治具的盖板紧密接触,外接的负压产生装置通过吸盘固定板121的气道123及吸盘122的第一开口124与吸盘122内的气腔126连通,外接的负压产生装置抽真空使第二开口125处产生负压,进而使盖板被吸盘122吸住。
82.随后,机械臂20带动吸取组件12移动以移除盖板,机械臂20进一步带动夹取组件11移动至治具处将物料放入治具内部,驱动件113驱动第一夹取件111及第二夹取件112沿第一方向x逐渐靠近,使第一夹爪1112与第二夹爪1122之间的距离减小,第一夹爪1112及第二夹爪1122与物料分离,使物料放入治具中。
83.进一步的,机械臂20带动吸取组件12移动并将盖板放入治具中,断开吸取组件12的负压使盖板与治具连接并开始对物料的加工。待加工完成后,机械臂20再次带动吸取组件12移动至治具处吸紧并移除盖板。转动机械臂20使夹取组件11转移至治具处,使第一夹爪1112及第二夹爪1122伸入物料内部,然后驱动件113驱动第一夹取件111及第二夹取件112沿第一方向x逐渐远离对物料进行夹取固定;机械臂20进一步带动夹取组件11移动至载具处将加工完的物料放回载具中,并使夹取组件11在载具中夹取另一物料并放入治具中,吸取组件12将盖板放入治具,以开始对另一待加工物料的加工。如此往复,直至载具中的待加工物料均完成加工。
84.上文中,参照附图描述了本技术的具体实施方式。但是,本领域中的普通技术人员能够理解,在不偏离本技术的精神和范围的情况下,还可以对本技术的具体实施方式作各种变更和替换。这些变更和替换都落在本技术所限定的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。