1.本发明涉及一种根据权利要求1所述的用于对轴向柱塞泵进行模型参数适配和控制的方法。
背景技术:
2.静压传动装置(hydrostatischer fahrantrieb)具有初级变量泵和次级变量马达。初级单元和次级单元的布线不仅可以以开环的方式配置。为了运行,初级单元和次级单元要么单独地要么耦合地被调整。从而得出次级侧上的与体积流量成比例的转速。工作压力根据负载力矩出现(sich einstellen),并且向上通过限压阀限制。
3.在斜盘结构方式的这种类型的轴向柱塞泵的情况下,输送体积流量借助于调整回转角被调整。通过液压缸进行调整。所述液压缸的室压力经由压力调节阀被调节。该泵具有负载敏感特性,使得斜盘由工作压力、更确切地说是由压在所述斜盘处的压差被摆回。可以使用由工作压力、控制压力和回转角组成的这种关系用于控制轴向柱塞泵并且从而控制传动装置。此外取决于速度的特征性稳态特性当前在组件检验台(komponentenpr
ü
fstand)处被测量或可以被计算。
技术实现要素:
4.与此相对地,本发明所基于的任务是创造一种具有降低的耗费的用于对轴向柱塞泵进行建模的方法。
5.该任务通过具有权利要求1的特征的方法来解决。
6.在权利要求2至8中描述该方法的有利改进方案。
7.根据本发明的方法优化轴向柱塞泵的模型,所述轴向柱塞泵被配置有可调整的输送容量,其中所述轴向柱塞泵具有在回转角上可调整的斜盘,所述轴向柱塞泵的调整单元的与控制压力有关的调整力以及从所述轴向柱塞泵的工作压力或工作压力差中得出的推力(druckkraft)作用(angreifen)于所述斜盘。根据这些力以及轴向柱塞泵的转速出现回转角。所述方法包括步骤:通过控制单元尤其是根据工作压力、转速和回转角确定所述轴向柱塞泵的准稳定态运行点的初始模型参数;通过所述控制单元根据所述初始模型参数尤其是从斜盘处的力平衡和其力学和/或运动学中确定所述调整单元的初始控制压力;通过所述控制单元根据所述初始控制压力和所述工作压力的至少一个额定轨迹确定所述调整单元的操控参量;通过控制单元利用所述操控参量操控所述调整单元;通过检测单元和/或所述控制单元检测和/或确定所述工作压力、所述速度和所述回转角的实际值;和通过所述控制单元相对于所述实际值并且根据所述实际值均衡所述模型;通过所述控制单元适配模型参数。
8.在一种改进方案中,该方法具有步骤:从操控参量和所述调整单元的操控阀的特性曲线中确定经适配的控制压力,以及通过所述控制单元确定经适配的控制压力与所述控制压力的偏差,其中适配模型参数的步骤如此进行使得偏差被最小化。
9.在一种改进方案中,所述模型的试探函数(ansatzfunktion)由多维特性曲线族、尤其是3维特性曲线族、由多项式公式(polynomans
ä
tzen)、由函数逼近、尤其是高斯过程模型或者由神经网络构成。
10.所述调整单元优选地具有液压缸,所述斜盘由所述液压缸铰接。尤其是所述液压缸是双作用的并且给所述液压缸的两个控制压力室分别分配有操控阀,其中每个控制压力室的操控参量是所分配的操控阀的操控电流,利用所述操控电流可以由控制单元操控该操控阀。
11.在一种改进方案中,提供步骤:从所要求的工作压力中确定至少一个额定轨迹。
12.在一种改进方案中,提供步骤:通过所述检测单元检测所述工作压力;通过第一比较元件确定所检测的工作压力与其额定轨迹的偏差;通过第二比较元件将最后提到的偏差与所述额定轨迹的二阶时间导数进行比较,以及通过所述控制单元根据最后提到的比较确定所述调整单元的操控参量。
13.在一种改进方案中,提供步骤:根据所述额定轨迹的一阶和/或二阶时间导数确定所述调整单元的操控参量。
14.在一种改进方案中,这些步骤递归地和/或针对多个运行点或运行范围进行。
附图说明
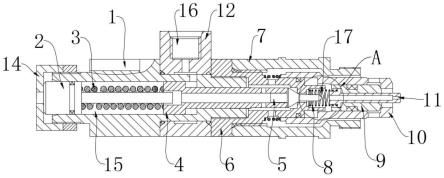
15.在下面在附图中更详细地阐述根据本发明的方法的实施例。其中:图1示出具有轴向柱塞泵的静压传动装置的示意图,针对所述轴向柱塞泵设置根据本发明的方法;图2示出根据图1的传动装置的轴向柱塞泵的液压电路图;以及图3示出根据一种实施例的方法。
具体实施方式
16.描述一种用于基于现有的传感器信息或传感器等效参量、例如通过模型计算的参量在运行中逐步地并且自动地标识静压传动装置的轴向柱塞泵的稳定态(station
ä
r)输入和输出特性的方法。
17.于是可以使用所述方法用于控制和调节轴向柱塞泵以及用于诊断目的。
18.根据图1,传动装置1具有串联连接的初级变量泵(prim
ä
re verstellpumpe)2和次级变量马达(sekund
ä
ren verstellmotor)4。前者例如由内燃机(vkm)驱动。初级单元2将机械能转换成液压能,次级单元4在从动侧(abtriebsseite)上将液压能转换成机械能。该过程也可以被反转,使得通过次级单元4在从动侧2上被制动(gebremst)。初级单元2和次级单元4的布线不仅可以以开环的方式发生、也就是说初级单元2和次级单元4的低压侧与压力平衡罐连接,而且可以以闭环方式发生、也就是说初级侧2和次级侧4的低压侧直接相互连接。两个电路经由限压阀被保护免受过高压力。为了提高传动系的效率,可以使用功率分流,其中机械功率路径与静压部分2、4平行地被安装。为了运行,初级单元2和次级单元4要么单独地要么耦合地被调整。从而得出在次级侧上的与体积流量成比例的转速。压力根据负载力矩出现,并且向上通过限压阀限制。
19.根据图2,轴向柱塞泵2以斜盘结构方式实施,其中所述轴向柱塞泵在工作管路6、8
中的输送体积流量借助于调整其斜盘10的回转角而被调整。该调整通过将斜盘10与调整单元的双作用液压缸12机械耦合进行。在此,液压缸12的两个控制室(stellkammern)可以单独地被加载控制压力剂。控制室中的各自的控制压力通过压力调节阀14、16被调整。
20.轴向柱塞泵2具有负载敏感(lastf
ü
hlig)特性,也就是说,所述轴向柱塞泵通过所施加的高工作压力p或δp被摆回。如果尽管高的压力仍想要保持泵继续向外摆动(ausgeschwenkt),则从而必须提高调整中的压力。除了取决于压力差之外也还取决于转速和回转角本身的这种特征性稳态特性通常被预先(im vorfeld)计算用于进行有针对性的调整,或者可以在组件检验台处被测量。
21.根据示出根据本发明的方法的一种实施例的图3,该方法基于轴向柱塞泵的输入参量工作压力δp、转速n和回转角α以及操控电流ia、ib。
22.工作压力δp尤其是经由根据图2的工作管路的压力差。
23.初始模型参数在各自的准稳定态运行点中被校正,使得实现测量和内部模型之间的尽可能好的一致性。为此,首先标识准稳定态区域,在所述准稳定态区域中,参数标识是有效的。这种行动的优点是,轴向柱塞机的实际参数不必预先精确地已知,而是可以以特定于泵的方式被学习,并且在使用期内(
ü
ber die lebenszeit hinweg)的变化也可以被学习和考虑。也就是说,在生产过程中不再必须如此精确地遵守公差,并且可以明显减少检验测量,并且从而可以节省成本。
24.轴向柱塞泵的稳态特性通过调整单元的与控制压力δpx成比例的调整力来描述,所述调整力作用于倾角可调的斜盘。该调整力可以以高达一定精度的方式从泵几何形状中根据工作压力δp、转速n和回转角α被计算。使用这些模型参数用于初始化自适应函数。
25.其中δpx表示控制室的对控制活塞(verstellkolben)起作用的控制压力或压差,所述控制压力或压差是必要的,以便将轴向柱塞泵保持在运行点中。对于活塞面积,这与调整力成比例。为了操控根据图2的调节阀,在方法分段“基于平坦度的前馈控制(flatness-based feedforward control)”内将控制压力δpx与所规划的额定轨迹z以及其两个时间导数z'、z''相组合地换算成操控电流ia;ib。
26.方法分段“参数适配(parameter adaption)”现在在正在进行中的运行中使调节力的模型 与测量数据相均衡(abgleichen)。为此,操控电流ia;ib在内部中通过调节阀的阀特性曲线被反算成经适配的控制压力δp'x,并且自适应校正基础试探函数的参数,使得反算的控制压力δp'x尽可能好地与模型值δpx一致。
27.为此,模型误差被最小化。
28.可以选择不同的函数作为的试探函数。例如3维特性曲线族、多项式公式或还有用于函数逼近的其他方法、诸如高斯过程模型、神经网络等。此外,可以明确地使用现有的模型知识。
29.从而,例如可以从试探函数或模型中计算出回转角的相关性,使得本来的估计问题缩减一个维度。从而,例如仅仍必须学习2维特性曲线族,而不是3维特性曲线族。
30.图3此外描述:在该方法中可能的是,考虑泵的期望的工作压力δp
des
,以便泵产生 期望的压力。
31.在本发明的一种实施方式中,为此目的通过检测单元检测工作压力δp的实际值
并且通过第一比较元件确定实际值与其额定轨迹z的偏差。
32.该偏差被添加到额定轨迹z的二阶时间导数z'',并且调整单元12、14、16的操控参量ia、ib通过控制单元根据从而经校正的二阶时间导数z''被确定。这种特殊的解决方案是不需要的,也可以直接对两个操控参量ia、ib进行调节干预。尽管如此,这种解决方案仍是特别有利的,因为该解决方案使得能够在“基于平坦度的前馈控制器(flatness based feedforward controller)”中考虑这种偏差,以便使偏差线性化。
33.可以与操控策略相组合地来探测(nachgewiesen)轴向柱塞泵的稳态特性的在线标识,其方式是测量操控电流和控制压力。所述操控电流和控制压力随着时间的推移将适配于泵特性,并且例如在重复地接近(anfahren)相同的运行点时发生改变。在离开(abfahren)相同的模式时,也可以将这种特性与附加的调节器区分,因为该附加的调节器显示相同的瞬变过程特性,而该稳态特性的标识随着时间的推移校正和改善这种特性。也可以直接在实现该功能的控制单元处代替真实的传感器信号而产生人工输入,以便检验该特性。
34.公开一种用于优化轴向柱塞泵的模型的方法,其中自适应函数学习轴向柱塞泵在校准循环中的特定稳态特性。这尤其是可以完全在牵引机中进行,在所述牵引机中安装有轴向柱塞泵作为初级单元。从而可以标识轴向柱塞泵的由生产决定的参数不确定性。此外,自适应函数也可以在正在进行中的运行中被使用,以便尤其是标识和补偿磨损、即轴向柱塞泵的稳态特性中的变化。然后在轴向活塞机的操控功能中使用所学习的特征性稳态特性。从而即使在传感器故障的情况下,也可以转入到纯受控模式中并且至少暂时地继续运行牵引机。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。