1.本发明属于踝足助行器技术领域,具体涉及一种踝足助行器的智能控制方法。
背景技术:
2.随着科学技术的不断发展,机械外骨骼被越来越多的应用于各行各业。而在辅助行走领域,外骨骼因其可以解放人力等优势,更是被越来越广泛地应用于辅助行动困难人群的下肢训练等方面。
3.随着年龄的不断增长,人往往会伴有身体机能的变化,如体力和运动神经功能的下降,身体反应不会那么敏感,导致行动上变得迟钝,产生身体不协调的状况。目前,多数老年人也确实存在肌肉无力、行走不便、容易摔倒等状况,给老年人的健康生活带来明显的不良影响。
4.目前用于辅助行走的器具多为拐杖、手杖等,对于真正提高老年人的下肢运动能力如踝关节力量等作用较小,没有很好地考虑到使用者的个性化需求和自身运动的协调性。
5.因此,现在亟需一种新型的、智能控制的助行器,能够有效辅助使用者行走,锻炼其踝部的运动能力。
技术实现要素:
6.针对现有技术中存在的上述问题,本发明的目的在于提供一种舒适度高,方便使用者穿戴、使用,能够有效辅助使用者行走的踝足助行器的智能控制方法。
7.本发明提供如下技术方案:一种踝足助行器的智能控制方法,踝足助行器包括行走机构及驱动行走机构的电动推杆,行走机构上设有一组足底压力传感器,足底压力传感器、电动推杆均与外部控制系统信号连接,所述踝足助行器的智能控制方法包括以下步骤:
8.s1、压力值-电压信号转换:通过足底压力传感器采集足底的压力值 i=1,
…
n,n表示足底压力传感器的个数,并将压力值转化为对应的输出电压信号ui;
9.s2、踝关节运动状态识别:采用bp神经网络算法构建踝关节运动状态识别模型,构建输出足底压力值与踝关节角度值的映射关系;
10.s3、电动推杆的伸缩距离δl计算:将步骤s1中获得的输出电压信号ui输入步骤s2中构建的踝关节运动状态识别模型中,获得对应的踝关节角度值,并将其转化为电动推杆的伸缩距离δl;
11.s4、电动推杆驱动踝足助行器运动:外部控制系统根据步骤s3中获得的电动推杆的伸缩距离,通过既定程序将信号传输至电动推杆,控制电动推杆进行相应的拉伸或收缩,带动踝足助行器进行运动。
12.进一步的,所述步骤s1中,输出电压信号ui的计算公式如下:
[0013][0014]
式中,r
ao-res
为反馈电阻大小,为传感器测量的足底压力值。
[0015]
进一步的,所述步骤s2中,足底压力值与踝关节角度值θ的映射公式如下:
[0016][0017]
其中θ为输出值,为输入值,wi为权值参数,e为误差函数。
[0018]
进一步的,所述步骤s4中,伸缩距离δl的计算公式如下:
[0019][0020]
其中,δl为电动推杆的伸缩距离,l0为电动推杆原伸出长度,l1为旋转支点与电动推杆的水平距离,旋转支点即为小腿支撑外骨架与底板的连接点,θ为踝关节角度值。
[0021]
进一步的,所述行走机构包括小腿机构及足底机构,小腿机构包括小腿支撑外骨架,足底机构包括底板;小腿支撑外骨架与底板之间铰接连接,小腿支撑外骨架与电动推杆的底座之间铰接连接,底板与电动推杆上的推杆之间铰接连接。
[0022]
进一步的,所述小腿支撑外骨架的上部设有小腿绑带装配孔,中部设有与人体小腿曲线相匹配的小腿外护套,小腿外护套的外侧设有电动推杆底座装配孔。
[0023]
进一步的,所述小腿外护套的内侧固定安装有小腿支撑内衬,小腿支撑内衬的形状与小腿外护套的形状相匹配。
[0024]
进一步的,所述底板上设有踝部支撑件,踝部支撑件上设有电动推杆端部装配孔及脚部绑带装配孔。
[0025]
进一步的,所述底板的上部设有柔性垫,一组足底压力传感器设置在柔性垫上,底板的下部设有防滑垫。
[0026]
进一步的,所述足底压力传感器设置在柔性垫上与脚部前掌及足根的对应位置处,足底压力传感器通过导线与外部电源连接。
[0027]
进一步的,所述小腿支撑外骨架、小腿支撑内衬及底板均采用3d打印制作。
[0028]
通过采用上述技术,与现有技术相比,本发明的有益效果如下:
[0029]
1)本发明中,通过建立贴合人体曲线的仿生学外骨骼模型,使用足底压力传感器接收健侧肢足底压力信号,并通过判断患者步态以计算患侧肢步行所需角度,通过电动推杆的长度变化,带动患者患侧肢运动,以辅助患者完成简单行走;
[0030]
2)本发明结构简单、穿戴、使用方便,实用性好,能够有效辅助使用者行走,锻炼其踝部的运动能力;
[0031]
3)本发明中,通过设置的柔性垫及防滑垫,能够进一步提高穿戴使用的舒适度和安全性。
附图说明
[0032]
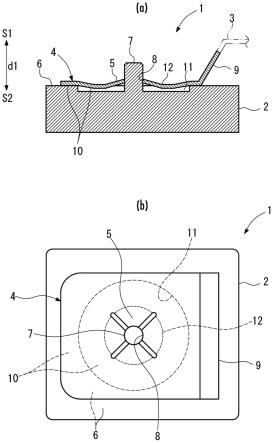
图1为本发明实施例中,踝足助行器的立体结构示意图;
[0033]
图2为本发明实施例中,小腿支撑外骨架的结构示意图;
[0034]
图3为本发明实施例中,小腿支撑内衬的结构示意图;
[0035]
图4为本发明实施例中,电动推杆的结构示意图;
[0036]
图5为本发明实施例中,底板的结构示意图;
[0037]
图6为本发明实施例中,踝足助行器的侧视结构示意图;
[0038]
图7为本发明实施例中,踝足助行器的正视结构示意图;
[0039]
图8为本发明实施例中,踝足助行器运动状态下的结构示意图;
[0040]
图9为本发明实施例中,足底压力传感器在柔性垫上的分布图;
[0041]
图10为本发明实施例中,压力值与踝关节角度值的对应关系图。
具体实施方式
[0042]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合说明书附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0043]
相反,本发明涵盖任何由权利要求定义的在本发明的精髓和范围上做的替代、修改、等效方法以及方案。进一步,为了使公众对本发明有更好的了解,在下文对本发明的细节描述中,详尽描述了一些特定的细节部分。对本领域技术人员来说没有这些细节部分的描述也可以完全理解本发明。
[0044]
实施例:
[0045]
请参阅图1-10,一种新型的踝足助行器,包括行走机构及驱动行走机构的电动推杆。
[0046]
具体的,行走机构包括小腿机构及足底机构;小腿机构包括小腿支撑外骨架1,小腿支撑外骨架1内侧安装有小腿支撑内衬2;足底机构包括底板4,小腿支撑外骨架1与底板4之间铰接连接。
[0047]
具体的,小腿支撑外骨架1与底板4之间铰接连接,电动推杆上的底座3 铰接设置在小腿支撑外骨架1上,电动推杆的推杆5与底板4铰接连接。
[0048]
具体的,小腿支撑外骨架1,如图2所示:包括小腿外护套1.1,小腿外护套1.1的形状贴合人体小腿曲线,可穿戴在小腿上,其两侧有条形的小腿绑带装配孔1.2,每侧各两个;绑带自小腿绑带装配孔1.2中穿过,实现穿戴;小腿外护套1.1外侧设有一对电动推杆底座装配孔1.3,可与电动推杆的底座 3实现铰链连接;小腿外护套1.1上设有自攻螺钉孔1.4,左右两侧各3个,中部纵列2个,可与小腿支撑内衬2通过自攻螺钉实现固定连接;小腿外护套1.1的下部设有连杆1.5,连杆1.5与足底机构铰接连接。
[0049]
具体的,小腿支撑内衬2,如图3所示:包括小腿内衬主体2.1,其形状贴合人体小腿曲线,小腿内衬主体2.1通过自攻螺钉与小腿外护套1.1实现连接。
[0050]
具体的,如图4所示:推杆5嵌套在底座3内;推杆5上位于底座一侧的端部与小腿外护套1.1通过螺栓连接;推杆5与底板4之间铰接连接。
[0051]
具体的,底板4,如图5所示:踝部支撑件4.1呈u形结构,外侧有电动推杆端部装配孔4.2,踝部支撑件4.1通过电动推杆端部装配孔4.2与75mm 的电动推杆上的螺栓孔5.2由螺栓螺母实现铰接;踝部支撑件4.1两侧设置有销钉孔4.3及条形的脚部绑带装配孔4.4。
[0052]
其中,小腿支撑外骨架1、电动推杆2及底板4均采用3d打印制作。
[0053]
本实施例通过建立贴合人体曲线的仿生学外骨骼模型,使用足底压力传感器接收健侧肢足底压力信号,并通过判断患者步态以计算患侧肢步行所需角度,通过微型电动推杆的长度变化,带动患者患侧肢运动,以辅助患者完成简单行走。
[0054]
控制流程具体步骤详细说明如下,
[0055]
1)压力值-电压信号转换:参照图7,本实例采用一组(前后共3个)足底压力传感器a、b和c,分别测量行走时前掌与足跟的压力值
[0056]
足底压力传感器线性电压转换模块输出电压值为ui,电压值ui与足底压力值满足:
[0057][0058]
式中,r
ao-res
为反馈电阻大小,为传感器测量的足底压力值;
[0059]
2)踝关节运动状态识别:采用bp神经网络算法构建踝关节运动状态识别模型,该模型的输入为健侧足底三个压力传感器的压力值、输出为患侧踝关节角度值。模型训练好后,可根据实时的足底压力值输出相应的踝关节角度。
[0060]
足底压力值与踝关节角度值θ之间的映射关系如图10所示,输出值可根据以下公式得出:
[0061][0062]
其中θ为输出值,为输入值,wi为权值参数,所有权值使用均值为0 方差为1的正态分布进行初始化,e为误差函数。获得踝关节角度之后,可通过以下公式转换为推杆的伸缩距离:
[0063][0064]
其中,δl为电动推杆的伸缩距离,l0为电动推杆原伸出长度,l1为旋转支点与推杆的水平距离,θ为踝关节角度值。
[0065]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。