技术特征:
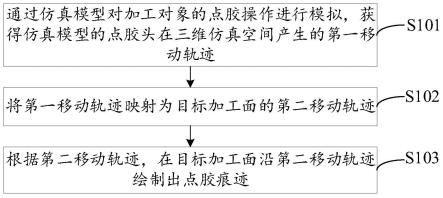
1.一种点胶效果模拟方法,其特征在于,应用于模拟设备,所述模拟设备配置有实体点胶机的仿真模型,所述方法包括:通过所述仿真模型对加工对象的点胶操作进行模拟,获得所述仿真模型的点胶头在三维仿真空间产生的第一移动轨迹;将所述第一移动轨迹映射为目标加工面的第二移动轨迹,其中,所述目标加工面表示所述加工对象用于进行所述点胶操作的表面;根据所述第二移动轨迹,在所述目标加工面沿所述第二移动轨迹绘制出点胶痕迹。2.根据权利要求1所述的点胶效果模拟方法,其特征在于,所述将所述第一移动轨迹映射为目标加工面的第二移动轨迹,包括:获取所述加工对象在所述三维仿真空间中的加工位置;根据所述加工位置与所述第一移动轨迹之间的空间关系,将所述第一移动轨迹在所述目标加工面的投影作为所述第二移动轨迹。3.根据权利要求1所述的点胶效果模拟方法,其特征在于,所述根据所述第二移动轨迹,在所述目标加工面沿所述第二移动轨迹绘制出点胶痕迹,包括:提供所述目标加工面二维的平面视图;根据所述第二移动轨迹,在所述平面视图中沿所述第二移动轨迹绘制出所述点胶痕迹。4.根据权利要求3所述的点胶效果模拟方法,其特征在于,所述根据所述第二移动轨迹,在所述平面视图中沿所述第二移动轨迹绘制出所述点胶痕迹,包括:获取所述加工对象与所述第二移动轨迹相对应的出胶参数;根据所述出胶参数,确定所述点胶痕迹的目标宽度;根据所述第二移动轨迹,在所述平面视图中沿所述第二移动轨迹绘制出具有所述目标宽度的点胶痕迹。5.根据权利要求1所述的点胶效果模拟方法,其特征在于,所述通过所述仿真模型对加工对象的点胶操作进行模拟,获得所述仿真模型的点胶头在三维仿真空间产生的第一移动轨迹,包括:获取所述仿真模型的控制参数,所述控制参数用于控制所述仿真模型对所述加工对象的点胶操作进行模拟;通过所述仿真模型响应所述控制参数,获得所述仿真模型的点胶头在所述三维仿真空间中产生的第一移动轨迹。6.根据权利要求5所述的点胶效果模拟方法,其特征在于,所述控制参数为所述点胶头的空间坐标,所述通过所述仿真模型响应所述控制参数,获得所述仿真模型的点胶头在所述三维仿真空间中产生的第一移动轨迹,包括:获取预先设置的坐标补偿信息;根据所述坐标补偿信息对所述控制参数进行修正,获得修正后的控制参数;通过所述仿真模型响应所述修正后的控制参数,获得所述仿真模型的点胶头在所述三维仿真空间中产生的第一移动轨迹。7.根据权利要求1所述的点胶效果模拟方法,其特征在于,所述通过所述仿真模型对加工对象的点胶操作进行模拟,获得所述仿真模型的点胶头在三维仿真空间产生的第一移动
轨迹之前,所述方法还包括:获取所述实体点胶机的三维模型;通过数字孪生仿真工具将所述三维模型转换为所述实体点胶机的数字孪生模型;将所述数字孪生模型,作为所述实体点胶机的仿真模型。8.一种点胶效果模拟装置,其特征在于,应用于模拟设备,所述模拟设备配置有实体点胶机的仿真模型,所述点胶效果模拟装置包括:轨迹映射模块,用于通过所述仿真模型对加工对象的点胶操作进行模拟,获得所述仿真模型的点胶头在三维仿真空间产生的第一移动轨迹;所述轨迹映射模块,还用于将所述第一移动轨迹映射为目标加工面的第二移动轨迹,其中,所述目标加工面表示所述加工对象用于进行所述点胶操作的表面;痕迹绘制模块,用于根据所述第二移动轨迹,在所述目标加工面沿所述第二移动轨迹绘制出点胶痕迹。9.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时,实现权利要求1-7任意一项所述的点胶效果模拟方法。10.一种模拟设备,其特征在于,所述模拟设备包括处理器以及存储器,所述存储器存储有计算机程序,所述计算机程序被所述处理器执行时,实现权利要求1-7任意一项所述的点胶效果模拟方法。
技术总结
本申请提供的点胶效果模拟方法及相关装置中,模拟设备基于实体点胶机的仿真模型,并通过该仿真模型模拟对加工对象的点胶操作,将仿真模型点胶头的第一移动轨迹映射为加工对象表面的第二移动轨迹,然后,沿第二移动轨迹在加工对象的表面绘制出点胶痕迹;从而避免使用实体点胶机进行现场调试;并且,采用轨迹映射的方式避免进行复杂的流体计算,提升了绘制点胶痕迹的效率。点胶痕迹的效率。点胶痕迹的效率。
技术研发人员:王佳相 吴丹雯 秦昊 刘智 张昱
受保护的技术使用者:广东省科学院智能制造研究所
技术研发日:2022.04.14
技术公布日:2022/7/29
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。