1.本发明属于自动化生产装备领域,具体涉及一种可伸缩手爪取料装置。
背景技术:
2.长形杆状物料在多个行业较为常见,例如,在机械制造行业中金属棒料的锻造和切削加工;在农业领域,很多农作物如小麦、玉米等,收割后留下的秸秆也呈棒料状;在食品加工领域,棒料状食品也很常见,如面条。
3.多数棒料在实际运输和使用过程中往往需要保持有序性,例如麦草往往要统一打包成麦捆再进行运输。实际储存输送过程中,棒料往往被无序、杂乱的堆放在一起,不利于棒料的取用,同时也容易发生滑落、倒塌等情况,像金属类棒料极易危及现场设备和工作人员的安全。因此,如何在取用棒料过程中将杂乱棒料整理为有序堆放或输送是一个关键问题,目前大多数情况还是采用人工方式整理。
4.人工方式取料耗时长、强度大,且效率低下,对于大尺寸,重量大的物料,取料过程中会存在安全隐患,但是这种方式可以保证取出的棒料整齐有序。因此,模仿人工取料动作,设计一款装置来代替人手抓取,这样,既可以保证棒料的有序性,又可以避免人工方式的不足。
5.需要注意的是,本部分旨在为权利要求书中陈述的本发明的实施方式提供背景或上下文。此处的描述不因为包括在本部分中就承认是现有技术。
技术实现要素:
6.本发明目的在于提供了一种可伸缩手爪取料装置,以机械执行机构代替人手的动作抓取棒料,降低劳动强度,提高了操作安全性。
7.为实现上述目的本发明采用如下技术方案:
8.该可伸缩手爪式取料装置,包括轴承座、固定连杆、转轴、转轴轴承和至少一个手爪机构;
9.所述转轴的两端通过所述转轴轴承与机架上的所述轴承座连接;所述手爪机构固定于所述转轴上,且与所述转轴同步转动;所述固定连杆一端与所述手爪机构固定连接,另一端与机架固定连接。
10.进一步地,上述手爪机构包括外法兰盘、固定偏心轮、偏心轮外圈轴承、内法兰盘和手爪组件;
11.所述外法兰盘固定于所述转轴上,且与所述转轴同步转动;所述固定偏心轮通过所述固定连杆与机架连接,所述固定偏心轮的偏心孔通过轴承与所述转轴连接,所述内法兰盘通过所述偏心轮外圈轴承套接在所述固定偏心轮(9)上;
12.所述内法兰盘周边均布有三个连接孔,所述三个连接孔上分别安装有三个手爪组件;其中,两个手爪组件分别包括铰接杆和手爪,所述铰接杆的一端与所述内法兰盘连接,另一端与所述手爪连接;一个手爪组件包括固定杆和手爪,所述固定杆的一端与所述内法
兰盘连接,另一端与所述手爪连接;三个手爪通过短轴和法兰轴承铰接于所述外法兰盘上。
13.进一步地,上述转轴包括多个短转轴,所述短转轴之间通过联轴器连接。
14.进一步地,上述手爪机构的数量为3个。
15.进一步地,还包括转轴隔套;所述转轴隔套套接在所述转轴上,且位于所述外法兰盘和所述固定偏心轮之间。
16.进一步地,还包括用于固定所述外法兰盘的固定法兰盘;所述固定法兰盘套接在所述转轴上且位于所述外法兰盘的外侧。
17.进一步地,还包括用于固定所述固定偏心轮的锁紧套;所述锁紧套套接在所述转轴上且位于所述固定偏心轮的外侧。
18.进一步地,上述固定连杆一端通过螺栓与所述手爪机构固定连接,另一端通过螺栓与机架固定连接。
19.进一步地,上述固定偏心轮和偏心轮外圈轴承之间设置有挡圈。
20.进一步地,上述转轴通过电机驱动。
21.本发明的有益效果:
22.1)本发明公开了一种可伸缩手爪取料装置,以机械装置代替人手完成棒料的取用动作,整个装置结构紧凑,占用空间小;采用四连杆机构和五连杆机构相并联的设计,依靠电机驱动即可实现手爪伸缩;因此五连杆机构在四连杆机构和电机驱动的共同作用下,也可以得到确定的运动轨迹,实现手爪伸缩;这样既可以保证装置顺利工作,又避免了不必要的约束力,节省动力。
23.2)本发明公开了一种可伸缩手爪取料装置,手爪和连杆的连接、手爪和外法兰盘的连接、铰接连杆和内法兰盘的连接均通过连杆轴、法兰轴承、轴套以及卡簧实现,保证相对运动的同时确保构件的轴向固定,不会发生零件脱落的情况。
24.3)本发明公开了一种可伸缩手爪取料装置,相比传统的手动取料操作,实现了机械化,降低了人工劳动强度,极大提高工作效率;通过代替人手的间歇动作,使得抓取出的棒料可以保证为整齐状态;解决了人工工作时棒料倾倒时可能带来的安全问题,保证工作的安全性、可靠性。
25.4)本发明公开了一种可伸缩手爪取料装置,合理控制转速可以实现定量抓取,能有效保证生产节拍,同时相较于其他机械抓取装置,结构简单,功能性强,在许多行业(农业,机械加工行业,食品加工行业)都可以得到应用,前景广阔。
附图说明
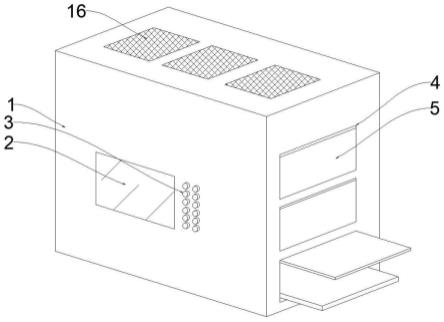
26.图1是本发明的结构示意图;
27.图2是本发明手爪机构的结构示意图;
28.图3是本发明手爪机构的侧视图;
29.图4是本发明手爪机构的爪铰接位置剖视图;
30.图5是本发明手爪机构的第一工作状态图;
31.图6是本发明手爪机构的第二工作状态图;
32.图7是本发明手爪机构的第三工作状态图
33.图8是本发明手爪机构的第四工作状态图。
34.图中,1、轴承座;2、固定连杆;3、联轴器;4、转轴;5、转轴轴承;6、外法兰盘;7、固定杆;8、手爪;9、固定偏心轮;10、偏心轮外圈轴承;11、挡圈;12、内法兰盘;13、铰接杆;14、固定法兰盘;15、转轴隔套;16、锁紧套;17、短轴;18、法兰轴承。
具体实施方式
35.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的范例;相反,提供这些实施方式使得本发明将更加全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。所描述的特征或特性可以以任何合适的方式结合在一个或更多实施方式中。
36.结合附图对本发明进行详述,具体步骤如下:
37.如图1所示为可伸缩手爪式取料装置的整体示意图,共装有三组手爪机构,其共用转轴4通过联轴器3连接在一起,可以同步转动。连接后的转轴两端装有转轴轴承5,通过轴承座1固定在工作区域的机架上。固定连杆2的一端通过螺栓与手爪机构的固定偏心轮9连接,另一端通过螺栓与工作区域里的固定机架连接,使固定偏心轮在工作过程中始终固定不动。装置工作时,电机驱动转轴4转动,转轴上并联的手爪机构同步动作,手爪同时伸缩,即可保证取出的棒料平整有序。
38.如图2所示为本发明手爪机构的结构示意图和图3所示为本发明手爪机构的侧视图,外法兰盘6通过固定法兰盘14与转轴4固连,随转轴同步转动,外法兰盘6周边通过短轴17和法兰轴承18与三只手爪8铰接,固定偏心轮9利用固定连杆2与机架连接,其偏心孔与转轴间安装轴承,使固定偏心轮与转轴可以相对转动。三个手爪组件分别包括第一手爪组件8.1、第二手爪组件8.2和第三手爪组件8.3。内法兰盘12套在固定偏心轮9上,二者之间装有偏心轮外圈轴承10,可以相对转动,固定偏心轮9和偏心轮外圈轴承10之间设置有挡圈11。内法兰盘12周边均布有三个连接孔,分别连接着一个固定杆7和两个铰接杆13。其中,固定连杆7通过螺栓与内法兰盘12连接孔固连,铰接杆13与内法兰盘12连接孔通过短轴17和法兰轴承18铰接,可以相对于内法兰盘12转动;三个连杆的另一端对应铰接至外法兰盘6上的手爪8。转轴隔套15套接在转轴4上,且位于外法兰盘6和固定偏心轮9之间;锁紧套16套接在转轴4上且位于固定偏心轮9的外侧。
39.工作时,轮轴4在电机驱动下旋转,固定在轮轴4上的外法兰盘6也随之转动,带动其上的手爪8绕中心轴旋转,而手爪8又通过固定杆7和铰接杆13与内法兰盘12连接。当手爪8随外法兰盘6转动至距固定偏心轮9的距离最近位置时,在连杆带动下手爪8将伸出至行程最大处;同理,当手爪8随外法兰盘6转动至距固定偏心轮9距离最远位置时,在连杆带动下手爪8将收回至最里端。该收缩过程即模拟了人手的抓取过程。
40.如图5至图8所示,以图中所示固定端手爪为例,在图5位置时,手爪即将伸出外法兰盘;当装置转至图6位置时,手爪伸出外法兰盘,开始抓取棒料;当工作状态如图7位置所示时,手爪伸出至最远位置,达到设定的棒料取用量,同时在三组抓取部分共同作用下,杂乱的棒料在抓取的过程中逐渐与转轴平行,即实现了棒料的有序整理;当装置转至图8位置时,手爪开始逐渐缩回外法兰盘内,此时棒料也随之开始与装置脱离,到达工作位置或落到输送带上。
41.本领域技术人员在考虑说明书及实践这里公开的发明后,将容易想到本发明的其
它实施方案。本技术旨在涵盖本发明的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本发明的一般性原理并包括本发明未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本发明的真正范围和精神由所附的权利要求指出。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。