一种基于故障子模块独立控制的mmc子模块igbt开路故障穿越方法
技术领域
1.本发明涉及电力电子变流器故障容错领域,具体涉及一种基于故障子模块独立控制的mmc子模块igbt开路故障穿越方法。
背景技术:
2.由于mmc桥臂中的半桥子模块开关管存在开路故障,当半桥子模块中的下开关管q2发生开路故障时,子模块电容电压会因为吸收的电能比释放的电能多。因此,故障子模块的电容电压会呈现波浪式上升。通过对故障子模块电流路径分析可知,当半桥子模块q2发生开路故障时,故障子模块在桥臂电流大于零(i
arm
(t)》0)的情况下呈现不可控模式。故将子模块在此种状态的工作模式称为不可控区域。当桥臂电流小于零(i
arm
(t)《0)时,通过控制故障子模块上开关管q1的开通和关断可以控制桥臂电流是否流经故障子模块电容,进而控制故障子模块电容电压。因此,根据故障子模块在下开关管q2发生开路故障时提出相应的开路故障穿越方法对实现故障子模块电容电压稳定及实现故障桥臂电容均压具有十分重要的作用。
3.然而,现有mmc故障容错控制方法尚未对q2发生开路故障情况下的进行独立的故障穿越控制,所以需要一个新的技术方案来解决这些问题。
技术实现要素:
4.发明目的:因半桥子模块在q2发生开路故障时,子模块电容电压尚能够被q1开关管在桥臂电流小于零的情况下进行控制。因此,为了更好的抑制故障子模块电容电压的快速上升问题及控制故障桥臂子模块电容电压均衡,能够使mmc更好的实现容错控制,提供一种基于故障子模块独立控制的mmc子模块igbt开路故障穿越方法,首次提出了基于模型预测控制的故障子模块电容电压独立控制。在完成故障子模块电容电压抑制的基础上,同时提出了对应的故障桥臂子模块均压方法,有效的保证了故障桥臂的子模块电容电压均衡。
5.技术方案:为实现上述目的,本发明提供一种基于故障子模块独立控制的mmc子模块igbt开路故障穿越方法,包括如下步骤:
6.s1:当子模块中的下开关管q2开路时,通过桥臂电流i
arm
判定故障子模块处于可控区域还是不可控区域,并据此决定是否启动故障穿越方法;
7.s2:故障穿越方法通过模型预测算法(mpc)选择最优占空比d
opt
,进而确定故障子模块上开关管q1驱动信号;
8.s3:根据步骤s1中桥臂电流i
arm
状态和步骤s2中故障子模块q1驱动信号确定故障桥臂具体投入的子模块。
9.进一步地,所述步骤s1中判定故障子模块处于可控区域还是不可控区域的方法为:
[0010][0011]
其中,判定子模块在下开关管q2开路时处于可控区域或是不可控区域依据是桥臂电流i
arm
是否被上开关q1控制,如果故障子模块在q2开路的情况下,故障子模块能够通过控制开关管q1的开通和关断实现对流经子模块的桥臂电流i
arm
实现控制,则故障子模块处于控制区域,否则故障子模块处于不可控区域。
[0012]
进一步地,所述步骤s1具体为:桥臂电流i
arm
通过桥臂电流传感器获得采样值后,采样值i
arm
(t)进行条件判断,如果故障子模块i
arm
(t)》0并且此时故障子模块的下开关管q2发生开路,故障子模块处于不可控区域,此时,不启动故障穿越程序,并将故障穿越方法启动标志位f
start
置0;如果i
arm
(t)<0并且此时故障子模块的下开关管q2发生开路故障,故障子模块块处于可控区域,此时,启动故障穿越程序,并将故障穿越方法启动标志位f
start
置1以启动故障穿越程序。
[0013]
进一步地,所述步骤s2中通过子模块下开关管q2开路故障数学模型预测t 1时刻的故障子模块电容电压值u
smi_q2fault
(t 1),电容电压值u
smi_q2fault
(t 1)的计算公式如下:
[0014][0015]
其中,公式(2)中c
sm
为子模块电容容值,di(t)为开关管q1在当前时刻t的占空比,i
arm
(t)为t时刻的桥臂电流,u
smi_q2fault
(t)为t时刻故障子模块电容电压采样值。
[0016]
进一步地,所述步骤s2中占空比di的数值选择公式为:
[0017]di
=[0,0.001,0.002,0.003,
···
,x-δx,x,x δx,
···
,0.999,1]
ꢀꢀ
(3)
[0018]
其中,公式(3)中di(t)占空比之间数值之间的数值间隔δx选取需要根据控制器cpu的计算速率来确定,一般情况下,数值间隔δx越小,预测值越准确,但是预测控制算法耗费的时间就越长。因此,在一个控制周期内,控制器能够完成所有占空比的预测计算量来确定占空比数值间隔δx。
[0019]
进一步地,所述步骤s2具体步骤为:
[0020]
a1:利用电压传感器对t时刻的故障子模块电容电压u
smi_q2fault
(t)进行测量;
[0021]
a2:通过公式(2)对故障子模块的电容电压值u
smi_q2fault
(t 1)进行预测;
[0022]
a3:利用评估代价函数g(t)对当前占空比di(t)进行评价,同时代价函数采用故障桥
[0023]
臂子模块电压均方差代价函数g
opt
具体的公式如下:
[0024][0025]
其中,公式(4)中u
*smi_ref
为故障子模块电容电压参考值;λ为附加权重系数,用于调节评估代价函数中主评估项与次要评估项之间的权重比,此处权重系数λ选择值0.001;u
sm_aveall
(t 1)为故障桥臂所有非故障子模块电容电压之和的平均值。
[0026]
a4:储存最优化值d
opt
(t),并应用该最优化参考值。
[0027]
进一步地,所述步骤a4中具体的最优化参考值储存方式采用逐次比较的方式,如果评估代价函数g(t)小于g
opt
(t),则将g(t)的值赋给g
opt
(t);同时,将此时的占空比di(t)赋给d
opt
(t);最后,经过对占空比公式(3)中所有di(t)进行对比之后即可储存最优化占空
比d
opt
(t)。
[0028]
进一步地,所述步骤s3具体为:
[0029]
当i
arm
(t)》0时,故障子模块处于不可控区域,但是,通过主动修改故障桥臂投入的正常子模块个数n即可实现故障桥臂子模块电容的均压:
[0030]
如果故障子模块的q1的驱动信号为1,故障桥臂在不主动干预的情况下有n个子模块处于工作状态,此时,因故障子模块独立控制排除故障子模块后,投入故障桥臂子模块电容电压最低的n-1个正常的子模块即可;
[0031]
如果故障子模块的q1的驱动信号为0,故障桥臂在不主动干预的情况下有n 1个子模块处于工作状态,此种状况下需重新调整驱动信号,基本条件就是保证n个投入的子模块个数不变,此时,只投入电容电压最低的n-1个正常的子模块,即可实现故障桥臂投入的子模块数n不变。
[0032]
当i
arm
(t)《0时,故障子模块处于可控区域,通过主动修改故障桥臂投入的子模块个数n即可实现故障桥臂子模块电容的均压:
[0033]
如果故障子模块的q1的驱动信号为1,投入包括故障子模块在内的n电容电压最高的子模块即可;
[0034]
如果故障子模块的q1的驱动信号为0,投入n个电容电压最高的子模块即可,其中不包括故障子模块。
[0035]
本发明提出了子模块的下开关管q2发生开路时故障子模块独立电压故障穿越控制方法。该方法将此时的故障子模块分为可控制区域和不可控制区域,在可控制区域内,利用模型预测控制方法选择最优的占空比来对故障子模块电容电压进行精确控制。该方法通过独立的变占空比控制实现了故障子模块电容电压上升抑制,具有快速、准确的优点。
[0036]
本发明提出了子模块的下开关管q2发生开路时的故障桥臂子模块电容电压均压控制方法。首先,根据桥臂电流正负分别将故障桥臂子模块投入方式分为两组。基于故障子模块故障穿越方法给出的q1驱动信号决定最终的投入子模块个数。该方法通过投入子模块个数控制准确的实现了桥臂电容电压稳定和均压。
[0037]
有益效果:本发明与现有技术相比,具备如下优点:
[0038]
1)首次提出了基于模型预测控制的故障子模块电容电压独立控制,在控制区域首次实现了故障子模块电容电压的准确控制和电容电压上升的有效抑制。
[0039]
2)基于该故障穿越控制方法,首次提出了基于桥臂电流和基于故障子模块q1驱动的故障桥臂子模块电容电压均压控制方法,该方法通过投入子模块个数的恒定控制方式实现了故障桥臂子模块的均压控制,实现了桥臂电压和mmc直流侧输入电压的均衡。
[0040]
3)该方法首次实现了对故障子模块电容电压的独立控制。
[0041]
4)该方法能够在将故障子模块电容电压控制在合理正常值的范围内。
[0042]
5)该方法为下一步的容错控制方法提供了优良的过渡条件。
附图说明
[0043]
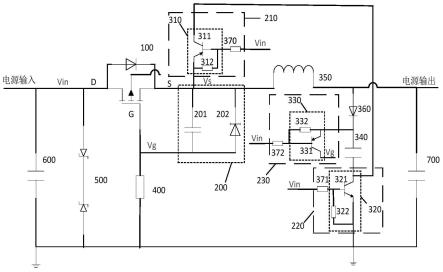
图1是单相模块化多电平变换器电路图;
[0044]
图2是模块化多电平变换器的半桥子模块q2故障的电流流向示意图;
[0045]
图3是半桥子模块电容电压独立控制方法结构图;
[0046]
图4是故障桥臂子模块均压流程图;
[0047]
图5是q2故障穿越方法仿真图。
具体实施方式
[0048]
下面结合附图和具体实施例,进一步阐明本发明,应理解这些实施例仅用于说明本发明而不用于限制本发明的范围,在阅读了本发明之后,本领域技术人员对本发明的各种等价形式的修改均落于本技术所附权利要求所限定的范围。
[0049]
本发明提供一种基于故障子模块独立控制的mmc子模块igbt开路故障穿越方法,本实施例中将该方法应用于模块化多电平变流器(modular multilevel converter.mmc)的故障穿越控制,其单相的mmc主回路结构如图1所示,其半桥子模块结构如图1中的子图所示。
[0050]
如图2所示,当半桥子模块q2发生开路故障时,半桥子模块的q1开关管只能在桥臂小于零的情况下能够控制桥臂电流是否流经电容,所以将桥臂电流小于零的区域将故障子模块称为可控制区域。当桥臂电流大于零时,桥臂电流不经过q1开关管,只经过二极管d1或者二极管d2,因此将桥臂电流大于零的区域称为故障子模块的不可控制区域。
[0051]
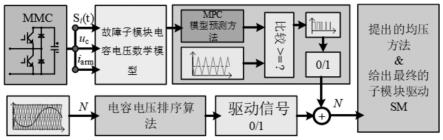
本实施例提供一种基于故障子模块独立控制的mmc子模块igbt开路故障穿越方法,参照图3,其包括如下步骤:
[0052]
s1:当子模块中的下开关管q2开路时,通过桥臂电流i
arm
判定故障子模块处于可控区域还是不可控区域,并据此决定是否启动故障穿越方法;
[0053]
步骤s1中判定故障子模块处于可控区域还是不可控区域的条件如下:
[0054][0055]
其中,判定子模块在下开关管q2开路时处于可控区域或是不可控区域依据是桥臂电流i
arm
是否被上开关q1控制。如果故障子模块在q2开路的情况下,故障子模块能够通过控制开关管q1的开通和关断实现对流经子模块的桥臂电流i
arm
实现控制,则故障子模块处于控制区域,否则故障子模块处于不可控区域。
[0056]
步骤s1具体为:桥臂电流i
arm
通过桥臂电流传感器获得采样值后,采样值i
arm
(t)进行条件判断。如果故障子模块i
arm
(t)》0并且此时故障子模块的下开关管q2发生开路,故障子模块处于不可控区域。此时,不启动故障穿越程序,并将故障穿越方法启动标志位f
start
置0。如果i
arm
(t)<0并且此时故障子模块的下开关管q2发生开路故障,故障子模块块处于可控区域。此时,启动故障穿越程序,并将故障穿越方法启动标志位f
start
置1以启动故障穿越程序。
[0057]
s2:根据故障穿越方法启动标志位f
start
,启动故障穿越方法,并通过模型预测算法(mpc)选择最优占空比d
opt
,进而确定故障子模块上开关管q1驱动信号;
[0058]
所述步骤s2中通过子模块下开关管q2开路故障数学模型预测t 1时刻的故障子模块电容电压值u
smi_q2fault
(t 1),电容电压预测值u
smi_q2fault
(t 1)的计算公式如下:
[0059][0060]
其中,公式(2)中c
sm
为子模块电容容值,di(t)为开关管q1在当前时刻t的占空比,iarm
(t)为t时刻的桥臂电流,u
smi_q2fault
(t)为t时刻故障子模块电容电压采样值。
[0061]
步骤s2中占空比di的数值选择公式为:
[0062]di
=[0,0.001,0.002,0.003,
···
,x-δx,x,x δx,
···
,0.999,1]
ꢀꢀ
(3)
[0063]
其中,公式(3)中di(t)占空比之间数值之间的数值间隔δx选取需要根据控制器cpu的计算速率来确定,一般情况下,数值间隔δx越小,预测值越准确,但是预测控制算法耗费的时间就越长。因此,在一个控制周期内,控制器能够完成所有占空比的预测计算量来确定占空比数值间隔δx。
[0064]
步骤s2具体步骤为:
[0065]
a1:利用电压传感器对t时刻的故障子模块电容电压u
smi_q2fault
(t)进行测量;
[0066]
a2:通过公式(2)对故障子模块的电容电压值进行预测u
smi_q2fault
(t 1)。
[0067]
a3:利用评估代价函数g(t)对当前占空比di(t)进行评价,同时代价函数采用故障桥
[0068]
臂子模块电压均方差代价函数g
opt
具体的公式如下:
[0069][0070]
其中,公式(4)中u
*smi_ref
为故障子模块电容电压参考值;λ为附加权重系数,用于调节评估代价函数中主评估项与次要评估项之间的权重比,此处权重系数λ选择值0.001;u
sm_aveall
(t 1)为故障桥臂所有非故障子模块电容电压之和的平均值。
[0071]
a4:储存最优化值d
opt
(t),并应用该最优化参考值。
[0072]
本实施例中具体的最优化参考值储存方式采用逐次比较的方式,如果评估代价函数g(t)小于g
opt
(t),则将g(t)的值赋给g
opt
(t);同时,将此时的占空比di(t)赋给d
opt
(t);最后,经过对占空比公式(3)中所有di(t)进行对比之后即可储存最优化占空比d
opt
(t)。
[0073]
s3:根据步骤s1桥臂电流i
arm
状态和步骤s2故障子模块q1驱动信号确定故障桥臂具体投入的子模块:
[0074]
参照图4,其具体的方法为:
[0075]
当i
arm
(t)》0时,故障子模块处于不可控区域。但是,通过主动修改故障桥臂投入的正常子模块个数n即可实现故障桥臂子模块电容的均压。1)如果故障子模块的q1的驱动信号为1,故障桥臂在不主动干预的情况下有n个子模块处于工作状态。此时,因故障子模块独立控制排除故障子模块后,投入故障桥臂子模块电容电压最低的n-1个正常的子模块即可;2)如果故障子模块的q1的驱动信号为0,故障桥臂在不主动干预的情况下有n 1个子模块处于工作状态。此种状况下需重新调整驱动信号,在基本条件就是保证n个投入的子模块个数不变。此时,只投入电容电压最低的n-1个正常的子模块,即可实现故障桥臂投入的子模块数n不变。
[0076]
当i
arm
(t)《0时,故障子模块处于可控区域。通过主动修改故障桥臂投入的子模块个数n即可实现故障桥臂子模块电容的均压。1)如果故障子模块的q1的驱动信号为1,投入包括故障子模块在内的n电容电压最高的子模块即可;2)如果故障子模块的q1的驱动信号为0,投入n个电容电压最高的子模块即可(不包括故障子模块)。
[0077]
基于上述方案,为了验证本发明方法的效果,进行了仿真实验,具体的仿真结果如图5所示,图5为单相mmc下桥臂子模块sm5发生q2开关管开路故障的子模块电容电压仿真波
形图,从图5a中可以看出,故障子模块的电容电压没有呈现波浪式的持续上升,而是呈现围绕参考电压的上下震荡。图5b和图5c可以看出,在控制区域中的故障子模块电容储存的电能得到了快速释放,实现了故障子模电容电压的稳定波动,抑制了故障子模块电容电压的持续上升。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。