技术特征:
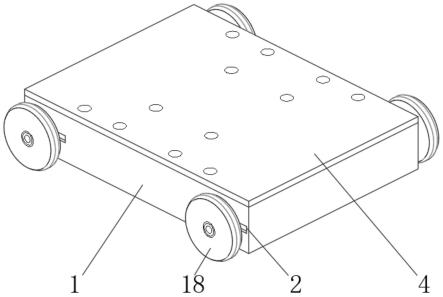
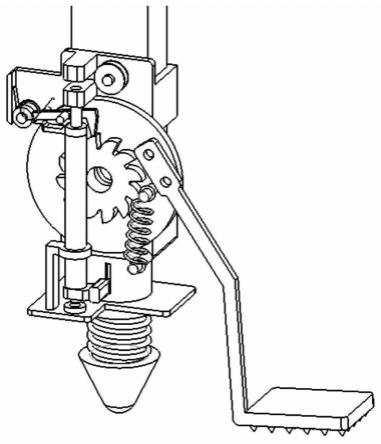
1.一种结构稳定的室内机器人行走结构,包括底架(1)、横轴(12)和安装在所述横轴(12)两端的滚轮(18),其特征在于:所述底架(1)的内部固定有四组限位架(3),且所述限位架(3)两两平行设置,每组所述限位架(3)上均活动安装有一组传动件(7),所述横轴(12)的局部安装在所述传动件(7)内部,平行设置的两组所述传动件(7)之间设置有传动轴(27),所述传动轴(27)的两端分别固定有第一锥轮(29)以及第二锥轮(30),所述第一锥轮(29)和所述第二锥轮(30)的侧面均啮合连接有一组传动件(7),另外两组所述传动件(7)的其中一组侧面啮合连接有第三锥轮(32),两组所述横轴(12)之间安装有转向杆(20)。2.根据权利要求1所述的一种结构稳定的室内机器人行走结构,其特征在于:所述底架(1)的侧面两两对称开设有四组外限位槽(2),所述横轴(12)的两端穿过所述外限位槽(2)位于所述底架(1)的外侧,所述滚轮(18)位于所述底架(1)的侧面。3.根据权利要求1所述的一种结构稳定的室内机器人行走结构,其特征在于:所述底架(1)上端安装有盖板(4),所述盖板(4)的背面固定有四组限位架(3),所述底架(1)上固定的限位架(3)和所述盖板(4)上固定的限位架(3)位置相对应,所述盖板(4)上均匀开设有多组通孔(5),所述通孔(5)的内部安装有连接栓(6),所述底架(1)和所述盖板(4)之间通过连接栓(6)相连接。4.根据权利要求3所述的一种结构稳定的室内机器人行走结构,其特征在于:所述传动件(7)的外侧开设有环形状的卡槽(8),所述传动件(7)安装在上下两组所述限位架(3)内部,所述限位架(3)局部位于所述卡槽(8)的内部,所述传动件(7)内部开设有弧形状的滑槽(9),所述传动件(7)上左右贯穿开设有内限位槽(10),所述传动件(7)的一侧开设有锥齿(11)。5.根据权利要求4所述的一种结构稳定的室内机器人行走结构,其特征在于:所述横轴(12)上固定有圆台状的第一转向块(13),所述横轴(12)的中心位置固定有圆台状和圆柱状组合体的第二转向块(14),所述第二转向块(14)的侧面对称固定有两组凸块(15),所述底架(1)上安装有两组限位座(19),所述限位座(19)内部开设有环形状凹槽,所述凸块(15)安装在所述凹槽的内部,所述第二转向块(14)和所述第一转向块(13)相邻设置,靠近末端的所述横轴(12)上固定有连接块(16),所述连接块(16)上对称固定有滑块(17),所述连接块(16)局部位于所述内限位槽(10)的内部,所述滑块(17)安装在所述滑槽(9)的内部。6.根据权利要求5所述的一种结构稳定的室内机器人行走结构,其特征在于:所述横轴(12)和所述限位座(19)构成旋转结构,所述连接块(16)的横截面宽度小于所述内限位槽(10)的宽度,所述滑块(17)和所述滑槽(9)构成滑动结构。7.根据权利要求1所述的一种结构稳定的室内机器人行走结构,其特征在于:所述底架(1)上平行固定有两组下轴承座(25),所述下轴承座(25)上通过螺栓安装有上轴承座(26),所述传动轴(27)上平行固定有多组卡环(28),所述卡环(28)位于所述下轴承座(25)和上轴承座(26)之间。8.根据权利要求4所述的一种结构稳定的室内机器人行走结构,其特征在于:两组所述锥齿(11)的侧面啮合连接有所述第一锥轮(29)与所述第二锥轮(30),位于同一所述横轴(12)上对称安装有两组所述传动件(7),其中一组所述传动件(7)侧面设置的所述锥齿(11)和所述第三锥轮(32)相啮合,所述第三锥轮(32)安装在电机(31)的运作端上,所述电机(31)安装在所述底架(1)内部。
9.根据权利要求5所述的一种结构稳定的室内机器人行走结构,其特征在于:所述转向杆(20)的两端均位于所述第一转向块(13)和所述第二转向块(14)之间的同一侧,所述转向杆(20)上并排等距离开设有三组限位孔(21),位于中间位置的所述限位孔(21)内部安装有伸缩杆(22)的伸缩端,所述底架(1)上平行固定有两组限位杆(24),所述限位杆(24)局部位于两侧的所述限位孔(21)内部,两组所述限位杆(24)之间设置有底座(23),所述底座(23)固定在所述底架(1)上,所述伸缩杆(22)通过螺栓安装在所述底座(23)上;所述限位孔(21)的孔径和所述限位杆(24)的横截面直径相同,所述转向杆(20)和所述限位杆(24)构成滑动结构,所述转向杆(20)和所述横轴(12)构成旋转结构。10.根据权利要求1、2、3、4、5、6、7、8或9所述的一种结构稳定的室内机器人行走结构,其特征在于:底架(1)和盖板(4)通过连接栓(6)安装组装过后,往盖板(4)上端架设智能化室内机器人其他组件,控制底架(1)内部安装的伸缩杆(22)和电机(31)的启动和运行,当需要装置带动架设在其上端智能机器人时,通过控制电机(31)启动,控制其一端安装的第三锥轮(32)旋转,使第三锥轮(32)通过锥齿(11)驱动第一锥轮(29)进行旋转,由于第一锥轮(29)和第二锥轮(30)通过传动轴(27)相固定,在第二锥轮(30)和锥齿(11)的配合下,所以第二锥轮(30)旋转会带动与其对应设置的传动件(7)进行旋转,基于连接块(16)和内限位槽(10)的结构尺寸,会使传动件(7)旋转的同时带动局部安装在内的横轴(12)同步旋转,从而带动四组滚轮(18)同步工作,实现装置的四驱行走,即使前后两组横轴同步旋转,进而使两组横轴带动其两端安装的滚轮进行旋转,进而使装置四轮驱动,四驱移动时行走结构更加稳定;通过人工架设的机器人传感器检测到需要该机器人的地方,通过伸缩杆(22)推动转向杆(20)进行移动,并且在限位杆(24)和限位孔(21)的配合下,使转向杆(20)水平移动,通过改变转向杆(20)位置,进而使转向杆(20)一端推动第一转向块(13)或第二转向块(14)进行旋转,借助限位座(19)内部开设的凹槽和凸块(15)限定配合,使第二转向块(14)可以进行水平面上的旋转,进而带动横轴(12)旋转,改变转向杆(20)和横轴(12)之间的夹角,从而使横轴(12)两端固定的滚轮(18)角度改变,使装置运动的方向在移动过程中同步改变,进而使前后两组横轴两端安装的滚轮改变的角度相同,进而达到同时改变四组滚轮运动角度的目的,使机器人能够更快的到达指定位置。
技术总结
本发明公开的一种结构稳定的室内机器人行走结构,属于机器人结构领域。本发明包括底架、横轴以及安装在横轴两端的滚轮,底架的内部固定有四组限位架,且限位架两两平行设置,每组限位架上均活动安装有一组传动件,横轴的局部安装在传动件内部,平行设置的两组传动件之间设置有传动轴,传动轴的两端分别固定有第一锥轮以及第二锥轮,第一锥轮和第二锥轮的侧面均啮合连接有一组传动件,另外两组传动件的其中一组侧面啮合连接有第三锥轮,两组横轴之间安装有转向杆。本发明能够根据需要实现四驱移动或四组滚轮同步工作。四驱移动时行走的结构更加稳定;四组滚轮转向同步工作时,控制前后两组滚轮角度同时改变,实现同步转向,更快到达指定位置。到达指定位置。到达指定位置。
技术研发人员:赵乾 戴亚平 王笑涵 贾之阳
受保护的技术使用者:北京理工大学
技术研发日:2022.04.24
技术公布日:2022/8/5
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。