1.本发明涉及联合仿真技术与车辆制动系统开发技术领域,尤其涉及一种车辆制动联合仿真方法、装置、终端设备以及存储介质。
背景技术:
2.车辆制动系统是一种复杂的机液多学科耦合系统,仿真研究是车辆制动系统开发与优化的必经之路。相关技术中的仿真技术存在建模能力有限、精度不足等缺点,通常孤立地研究液压制动系统自身结构,其研究囿于制动器力学性能本身,而忽视了整车复杂工况下的制动系统工作状况,导致仿真结果与实际存在较大偏差。在相关整车车辆制动联合仿真技术中,制动器模型往往过于简单,一定程度上忽略了制动间隙、制动液压缩特性的复杂性,也导致系统响应时间与实际存在偏差,此类缺陷影响了车辆制动距离估算精度及制动智能控制的准确性。
3.因此,有必要提出一种提高车辆制动系统性能的解决方案。
技术实现要素:
4.本发明的主要目的在于提供一种车辆制动联合仿真方法、装置、终端设备以及存储介质,旨在提高车辆制动系统的性能。
5.为实现上述目的,本发明提供一种车辆制动联合仿真方法,所述车辆制动联合仿真方法包括:
6.所述车辆制动联合仿真方法包括以下步骤:
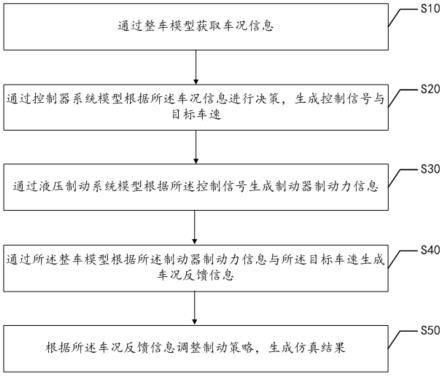
7.通过整车模型获取车况信息;
8.通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;
9.通过液压制动系统模型根据所述控制信号生成制动器制动力信息;
10.通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;
11.根据所述车况反馈信息调整制动策略,生成仿真结果。
12.可选地,所述通过整车模型获取车况信息的步骤之前还包括:
13.建立所述控制器系统模型、所述液压制动系统模型以及所述整车模型,其中,所述整车模型包括道路交通环境模型及整车动力学模型;
14.设置所述控制器系统模型、所述液压制动系统模型以及所述整车模型构成的联合仿真环境;
15.创建所述控制器系统模型与所述液压制动系统模型之间,以及所述控制器系统模型与所述整车模型之间的仿真接口,以用于所述联合仿真中信息的传递,其中,所述信息包括所述车况信息、所述控制信号、所述制动器制动力信息以及所述车况反馈信息。
16.可选地,所述通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速的步骤包括:
17.通过控制器系统模型根据所述车况信息中的障碍物运动信息与车辆运动信息进行运动轨迹预估与危险等级预估,得到预估结果;
18.根据所述车辆运动信息进行稳定性评价,得到失稳概率;
19.基于预设算法根据所述预估结果与所述失稳概率进行制动决策与制动强度计算,得到制动强度结果;
20.基于目标制动力计算模型根据所述制动强度结果计算目标制动力,并通过防抱死控制模块根据所述制动强度结果调节制动压力,得到制动压力结果;
21.通过制动力控制模块根据所述目标制动力与所述制动压力结果生成所述控制信号;
22.根据所述车况信息中的障碍物运动信息、车辆运动信息以及道路交通环境信息生成所述目标车速。
23.可选地,所述通过液压制动系统模型根据所述控制信号生成制动器制动力信息的步骤包括:
24.根据所述控制信号对所述液压制动系统模型进行多通道执行器控制,得到制动器控制结果;
25.通过制动力传感器根据所述制动器控制结果得到所述制动器制动力信息。
26.可选地,所述通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息的步骤包括:
27.通过所述整车模型中的整车动力学模型,根据所述制动器制动力信息与所述目标车速生成运动控制结果;
28.通过运动传感器根据所述运动控制结果得到所述车况反馈信息。
29.可选地,所述根据所述车况反馈信息调整制动策略,生成仿真结果的步骤包括:
30.根据所述车况反馈信息进行稳定性评价,得到稳定性评价结果;
31.根据所述稳定性评价结果进行制动效果评价,得到制动效果评价结果;
32.基于所述制动效果评价结果调整所述制动策略,并收集执行所述制动策略产生的性能指标数据;
33.通过预设寻优算法根据所述性能指标数据得到所述仿真结果。
34.可选地,所述根据所述车况反馈信息调整制动策略,生成仿真结果的步骤之后还包括:
35.根据预设步长调整所述控制器系统模型、所述液压制动系统模型或所述整车模型中的目标参数;
36.基于所述目标参数重复执行联合仿真,直至得到预设批次的仿真数据;
37.通过预设寻优算法根据所述仿真数据得到目标仿真结果。
38.此外,为实现上述目的,本发明还提供一种车辆制动联合仿真装置,所述车辆制动联合仿真装置包括:
39.获取模块,用于通过整车模型获取车况信息;
40.控制模块,用于通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;
41.制动模块,用于通过液压制动系统模型根据所述控制信号生成制动器制动力信
息;
42.反馈模块,用于通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;
43.调整模块,用于根据所述车况反馈信息调整制动策略,生成仿真结果。
44.此外,为实现上述目的,本发明还提供一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆制动联合仿真程序,所述车辆制动联合仿真程序被所述处理器执行时实现如上所述的车辆制动联合仿真方法的步骤。
45.此外,为实现上述目的,本发明还提供一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆制动联合仿真程序,所述车辆制动联合仿真程序被处理器执行时实现如上所述的车辆制动联合仿真方法的步骤。
46.本发明实施例提出的一种车辆制动联合仿真方法、装置、终端设备以及存储介质,通过整车模型获取车况信息;通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;通过液压制动系统模型根据所述控制信号生成制动器制动力信息;通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;根据所述车况反馈信息调整制动策略,生成仿真结果。通过液压制动系统模型、整车模型以及控制器系统模型,进行联合仿真,充分发挥各系统模型的专业性,对整车复杂车况下的制动系统工作情况进行研究,提高了制动控制的准确性,从而提高了制动系统的性能。
附图说明
47.图1为本发明车辆制动联合仿真装置所属终端设备的功能模块示意图;
48.图2为本发明车辆制动联合仿真方法一示例性实施例的流程示意图;
49.图3为本发明车辆制动联合仿真方法另一示例性实施例的流程示意图;
50.图4为本发明车辆制动联合仿真方法又一示例性实施例的流程示意图;
51.图5为本发明实施例中的整车多软件联合仿真建模系统的原理示意图;
52.图6为本发明实施例中基于amesim搭建的集成式电控液压制动系统仿真模型示意图;
53.图7为本发明实施例中simulink软件中与amesim及carsim的联合仿真接口示意图;
54.图8为本发明实施例中联合仿真运行成功后的可视化功能示意图。
55.本发明目的的实现、功能特点及优点将结合实施例,参照附图做进一步说明。
具体实施方式
56.应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
57.本发明实施例的主要解决方案是:通过整车模型获取车况信息;通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;通过液压制动系统模型根据所述控制信号生成制动器制动力信息;通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;根据所述车况反馈信息调整制动策略,生成仿真结果。通过液压制动系统模型、整车模型以及控制器系统模型,进行联合仿真,充分发挥各系统模型的专业性,对整车复杂车况下的制动系统工作情况进行研究,提高了制动控制的准确性,从而
提高了制动系统的性能。
58.当今仿真研究是车辆制动系统开发与优化的必经之路,但相关技术中,仿真技术存在建模能力有限、精度不足等缺点:大多孤立地研究液压制动系统自身结构,其研究囿于制动器力学性能本身,而忽视了整车复杂工况下的制动系工作状况,例如蓄能器体积是否满足长距离持续制动的供液需求,abs连续循环下制动器阀口的开关策略是否可以简化而增加耐久性;在整车联合仿真中,制动器的模型往往过于简单,一定程度上忽视了制动间隙、制动液压缩特性的复杂性,导致系统响应时间与实际有达0.1s甚至以上的偏差,这严重影响了制动距离估算精度及制动智能控制的准确性。以上仿真技术的不足使得制动器厂家往往需要更多更昂贵的试验以优化制动系统,导致了开发成本的上升。
59.本发明提供一种解决方案,通过建立液压系统精准模型、整车动力学及道路交通环境精准模型,以及传感器数据处理模块及分层控制系统模型,并合理设置接口使得三软件联合仿真,充分发挥专业软件的功能,通过一种基于仿真的参数匹配及优化方法,实现制动器性能的提高。
60.具体地,参照图1,图1为本发明车辆制动联合仿真装置所属终端设备的功能模块示意图。该车辆制动联合仿真装置可以为独立于终端设备的、能够进行车辆制动联合仿真的装置,其可以通过硬件或软件的形式承载于终端设备上。该终端设备可以为手机、平板电脑等具有数据处理功能的智能移动终端,还可以为具有数据处理功能的固定终端设备或服务器等。
61.在本实施例中,该车辆制动联合仿真装置所属终端设备至少包括输出模块110、处理器120、存储器130以及通信模块140。
62.存储器130中存储有操作系统以及车辆制动联合仿真程序,车辆制动联合仿真装置可以将通过整车模型获取的车况信息、通过控制器系统模型根据所述车况信息进行决策,生成的控制信号与目标车速、通过液压制动系统模型根据所述控制信号生成的制动器制动力信息、通过所述整车模型根据所述制动器制动力信息与所述目标车速生成的车况反馈信息,以及根据所述车况反馈信息调整制动策略,生成的仿真结果等信息存储于该存储器130中;输出模块110可为显示屏等。通信模块140可以包括wifi模块、移动通信模块以及蓝牙模块等,通过通信模块140与外部设备或服务器进行通信。
63.其中,存储器130中的车辆制动联合仿真程序被处理器执行时实现以下步骤:
64.通过整车模型获取车况信息;
65.通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;
66.通过液压制动系统模型根据所述控制信号生成制动器制动力信息;
67.通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;
68.根据所述车况反馈信息调整制动策略,生成仿真结果。
69.进一步地,存储器130中的车辆制动联合仿真程序被处理器执行时还实现以下步骤:
70.建立所述控制器系统模型、所述液压制动系统模型以及所述整车模型,其中,所述整车模型包括道路交通环境模型及整车动力学模型;
71.设置所述控制器系统模型、所述液压制动系统模型以及所述整车模型构成的联合
仿真环境;
72.创建所述控制器系统模型与所述液压制动系统模型之间,以及所述控制器系统模型与所述整车模型之间的仿真接口,以用于所述联合仿真中信息的传递,其中,所述信息包括所述车况信息、所述控制信号、所述制动器制动力信息以及所述车况反馈信息。
73.进一步地,存储器130中的车辆制动联合仿真程序被处理器执行时还实现以下步骤:
74.通过控制器系统模型根据所述车况信息中的障碍物运动信息与车辆运动信息进行运动轨迹预估与危险等级预估,得到预估结果;
75.根据所述车辆运动信息进行稳定性评价,得到失稳概率;
76.基于预设算法根据所述预估结果与所述失稳概率进行制动决策与制动强度计算,得到制动强度结果;
77.基于目标制动力计算模型根据所述制动强度结果计算目标制动力,并通过防抱死控制模块根据所述制动强度结果调节制动压力,得到制动压力结果;
78.通过制动力控制模块根据所述目标制动力与所述制动压力结果生成所述控制信号;
79.根据所述车况信息中的障碍物运动信息、车辆运动信息以及道路交通环境信息生成所述目标车速。
80.进一步地,存储器130中的车辆制动联合仿真程序被处理器执行时还实现以下步骤:
81.根据所述控制信号对所述液压制动系统模型进行多通道执行器控制,得到制动器控制结果;
82.通过制动力传感器根据所述制动器控制结果得到所述制动器制动力信息。
83.进一步地,存储器130中的车辆制动联合仿真程序被处理器执行时还实现以下步骤:
84.通过所述整车模型中的整车动力学模型,根据所述制动器制动力信息与所述目标车速生成运动控制结果;
85.通过运动传感器根据所述运动控制结果得到所述车况反馈信息。
86.进一步地,存储器130中的车辆制动联合仿真程序被处理器执行时还实现以下步骤:
87.根据所述车况反馈信息进行稳定性评价,得到稳定性评价结果;
88.根据所述稳定性评价结果进行制动效果评价,得到制动效果评价结果;
89.基于所述制动效果评价结果调整所述制动策略,并收集执行所述制动策略产生的性能指标数据;
90.通过预设寻优算法根据所述性能指标数据得到所述仿真结果。
91.进一步地,存储器130中的车辆制动联合仿真程序被处理器执行时还实现以下步骤:
92.根据预设步长调整所述控制器系统模型、所述液压制动系统模型或所述整车模型中的目标参数;
93.基于所述目标参数重复执行联合仿真,直至得到预设批次的仿真数据;
94.通过预设寻优算法根据所述仿真数据得到目标仿真结果。
95.本实施例通过上述方案,具体通过整车模型获取车况信息;通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;通过液压制动系统模型根据所述控制信号生成制动器制动力信息;通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;根据所述车况反馈信息调整制动策略,生成仿真结果。通过液压制动系统模型、整车模型以及控制器系统模型,进行联合仿真,充分发挥各系统模型的专业性,对整车复杂车况下的制动系统工作情况进行研究,提高了制动控制的准确性,从而提高了制动系统的性能。
96.基于上述终端设备架构但不限于上述架构,提出本发明方法实施例。
97.本实施例方法的执行主体可以为一种车辆制动联合仿真装置或终端设备等,本实施例以车辆制动联合仿真装置进行举例。
98.参照图2,图2为本发明车辆制动联合仿真方法一示例性实施例的流程示意图。所述车辆制动联合仿真方法包括:
99.步骤s10,通过整车模型获取车况信息;
100.具体地,整车模型中可以包括车辆各大系统动力学模型与道路交通环境模型等,其中道路交通环境模型可以包括十字路口模型、对开路面模型、侧向风模型以及交通流模型等,通过激光雷达传感器、负载传感器、侧倾角传感器以及转向角传感器等传感器,可以收集车辆周围的障碍物的相关信息,例如障碍物距离、障碍物角度等信息,可以综合判断出障碍物运动信息;通过车速传感器、轮速传感器以及负载传感器等运动传感器,可以得到车辆的运动信息;通过十字路口模型、对开路面模型、侧向风模型以及交通流模型等,可以得到车辆周围的道路交通环境信息,综合上述信息可以得到车辆的车况信息,将车辆的车况信息输入控制系统模型中,即可进行控制决策,从而实现对车辆的制动系统及车速控制等进行适时的调节。
101.在此之前,需要建立所述整车模型、控制器系统模型,以及液压制动系统模型,并且对各模型构成的联合仿真环境进行设置,进一步创建各模型之间的仿真接口,以便于进行各模型之间信息的传递。
102.步骤s20,通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速,具体包括:
103.通过控制器系统模型根据所述车况信息中的障碍物运动信息与车辆运动信息进行运动轨迹预估与危险等级预估,得到预估结果;
104.根据所述车辆运动信息进行稳定性评价,得到失稳概率;
105.基于预设算法根据所述预估结果与所述失稳概率进行制动决策与制动强度计算,得到制动强度结果;
106.基于目标制动力计算模型根据所述制动强度结果计算目标制动力,并通过防抱死控制模块根据所述制动强度结果调节制动压力,得到制动压力结果;
107.通过制动力控制模块根据所述目标制动力与所述制动压力结果生成所述控制信号;
108.根据所述车况信息中的障碍物运动信息、车辆运动信息以及道路交通环境信息生成所述目标车速。
109.进一步地,将整车模型获取并整合后的车况信息发送至控制器系统模型后,控制器系统模型获取到车况信息后,根据其中的车辆运动信息进行稳定性评价,判断车辆的失稳概率;根据障碍物运动信息与车辆运动信息可以进行处理运动轨迹预估,进而进行危险等级预估,危险等级的预估结果包括不会相撞、可能相撞、需制动避撞以及制动难避免四种情况,通过制动决策算法与制动强度算法结合预估结果与失稳概率可以进行制动决策,进而通过目标制动力计算模型计算出目标制动力,通过abs防抱死控制模块根据制动强度调节制动压力,由制动力pid控制模块可以生成控制信号,将控制信号发送至液压制动系统模型,由液压制动系统模型根据控制信号得到制动器制动力信息。此外,根据车况信息中的障碍物运动信息、车辆运动信息以及道路交通环境信息可以生成目标车速,将目标车速发送至整车模型,整车模型即可根据目标车速调整车辆状态,并结合液压制动系统模型输出的制动器制动力信息生成车况反馈信息。
110.步骤s30,通过液压制动系统模型根据所述控制信号生成制动器制动力信息,具体可包括:
111.根据所述控制信号对所述液压制动系统模型进行多通道执行器控制,得到制动器控制结果;
112.通过制动力传感器根据所述制动器控制结果得到所述制动器制动力信息。
113.更进一步地,液压制动系统模型收到控制器系统模型生成的控制信号后,即可进行多通道执行器控制,制动系统中的储液罐模型、踏板制动模型、电驱制动模型、模式切换阀、增压比例阀以及泄压开关阀根据控制信号执行对应的操作,得到制动器控制结果,本发明实施例中的制动器包括四轮盘式制动器及四轮鼓式制动器,通过制动力传感器根据制动器控制结果可得到制动器制动力信息,将制动器制动力信息发送至整车模型,整车模型即可根据目标车速与制动器制动力信息生成车况反馈信息。
114.步骤s40,通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息,具体可包括:
115.通过所述整车模型中的整车动力学模型,根据所述制动器制动力信息与所述目标车速生成运动控制结果;
116.通过运动传感器根据所述运动控制结果得到所述车况反馈信息。
117.当整车模型获取到液压制动系统模型生成的制动器制动力信息以及控制器系统模型生成的目标车速后,车辆状态由此发生改变,由整车动力学模型根据制动器制动力信息与目标车速生成运动控制结果,进而由整车模型中包括车速传感器、轮速传感器、负载传感器、侧倾角传感器以及转向角传感器在内的各类运动传感器根据运动控制结果生成车况反馈信息,进而将车况反馈信息发送至控制器系统模型,由控制器系统模型对车况反馈信息进行分析,从而调整制动策略,并对之前的调整进行有效评价。
118.步骤s50,根据所述车况反馈信息调整制动策略,生成仿真结果,具体可包括:
119.根据所述车况反馈信息进行稳定性评价,得到稳定性评价结果;
120.根据所述稳定性评价结果进行制动效果评价,得到制动效果评价结果;
121.基于所述制动效果评价结果调整所述制动策略,并收集执行所述制动策略产生的性能指标数据;
122.通过预设寻优算法根据所述性能指标数据得到所述仿真结果。
123.当控制器系统模型通过仿真接口获取到液压制动系统模型生成的制动器制动力信息以及整车模型生成的车况反馈信息后,可以进一步对制动效果进行评价,并相应地调整车辆的制动策略,进而收集各部分产生的性能指标数据,例如制动时间、制动时车辆的稳定性、蓄能器制动液流量以及电磁阀开闭次数等性能指标,通过设计优化目标以及各参数对应的权重,根据寻优算法即可得到对应工况下的最优参数,即为所得仿真结果,由此基于仿真的参数与优化方法,实现制动器性能的提高。
124.在本实施例中,通过整车模型获取车况信息;通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;通过液压制动系统模型根据所述控制信号生成制动器制动力信息;通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;根据所述车况反馈信息调整制动策略,生成仿真结果。通过液压制动系统模型、整车模型以及控制器系统模型,进行联合仿真,充分发挥各系统模型的专业性,对整车复杂车况下的制动系统工作情况进行研究,提高了制动控制的准确性,从而提高了制动系统的性能。
125.参照图3,图3为本发明车辆制动联合仿真方法另一示例性实施例的流程示意图。基于上述图2所示的实施例,在本实施例中,在步骤s10之前,所述车辆制动联合仿真方法还包括:
126.步骤s01,建立所述控制器系统模型、所述液压制动系统模型以及所述整车模型,其中,所述整车模型包括道路交通环境模型及整车动力学模型;
127.具体地,在本发明实施例中,在carsim中搭建整车模型,其中包括道路交通环境模型及整车动力学模型,通过车速传感器、激光雷达、组合导航仪、轮速传感器等对车况信息进行采集;在amesim中利用hydraulic、signal and control等库中的各模块,搭建支持踏板制动、电控制动等功能的液压制动系统;在simulink程序中搭建控制器系统模型,在其他实施例中,也可以采用其他软件搭建此类联合仿真模型。
128.步骤s02,设置所述控制器系统模型、所述液压制动系统模型以及所述整车模型构成的联合仿真环境;
129.进一步地,设置simulink起始位置路径及计算机系统环境变量,以visual studio为代码编译程序,设置各软件求解器调用文件,设置联合仿真环境;以simulink为联合仿真的中间软件,进而创建simulink与amesim、simulink与carsim的仿真接口,支持信号的传递。
130.步骤s03,创建所述控制器系统模型与所述液压制动系统模型之间,以及所述控制器系统模型与所述整车模型之间的仿真接口,以用于所述联合仿真中信息的传递,其中,所述信息包括所述车况信息、所述控制信号、所述制动器制动力信息以及所述车况反馈信息。
131.更进一步地,模型搭建完毕后,还需创建各模型之间的仿真接口,例如控制器系统模型与液压制动系统模型之间,以及控制器系统模型与整车模型之间的仿真接口,控制器系统模型与液压制动系统模型之间的仿真接口可用于获取制动器制动力信息,作为amesim与simulink联合仿真接口的输入,该接口同时获取simulink向amesim发送的各电磁阀及电机控制信号;carsim可通过控制器系统模型与整车模型之间的仿真接口向simulink输入路面附着系数信息、障碍物信息、车辆多自由度运动信息、车轮转速信息等车况信息,并接收amesim经由simulink处理后传递的制动器制动力信息,同时收到来自simulink控制策略的
目标车速;在联合仿真中间的simulink模型中具有两个联合仿真接口,分别与amesim和carsim进行信息传递,在模型中具有基于传感器信号的稳定性判别、abs控制等模块,对车辆的制动进行决策与控制,并支持智能驾驶的功能。
132.本实施例通过上述方案,具体通过建立所述控制器系统模型、所述液压制动系统模型以及所述整车模型,其中,所述整车模型包括道路交通环境模型及整车动力学模型;设置所述控制器系统模型、所述液压制动系统模型以及所述整车模型构成的联合仿真环境;创建所述控制器系统模型与所述液压制动系统模型之间,以及所述控制器系统模型与所述整车模型之间的仿真接口,以用于所述联合仿真中信息的传递,其中,所述信息包括所述车况信息、所述控制信号、所述制动器制动力信息以及所述车况反馈信息。通过amesim软件建立液压制动系统模型,通过carsim软件建立包括整车动力学及道路交通环境模型在内的整车模型,通过simulink软件建立包括传感器数据处理模块及分层控制系统模型在内的控制器系统模型,并合理设置接口使得三软件联合仿真,充分发挥专业软件的功能,基于此进行仿真的参数匹配及优化方法,实现制动器性能的提高。
133.参照图4,图4为本发明车辆制动联合仿真方法又一示例性实施例的流程示意图。基于上述图2所示的实施例,在本实施例中,在步骤s50之后,所述车辆制动联合仿真方法还包括:
134.步骤s60,根据预设步长调整所述控制器系统模型、所述液压制动系统模型或所述整车模型中的目标参数;
135.具体地,在联合仿真过程中,可以设置三软件的联合仿真步长相等,例如0.5ms,仿真过程中可以进行批次处理及数据存储,针对改变同一目标参数的重复仿真,可以进行批次处理,并将数据导入matlab的工作区,从而进行批量存储。
136.步骤s70,基于所述目标参数重复执行联合仿真,直至得到预设批次的仿真数据;
137.进一步地,由于联合仿真的指令接口位于simulink,故可以在matlab设置批次处理的脚本,自动多次运行simulink程序并改变部分参数,最终将simulink程序运行的结果以多个数值矩阵的形式导入工作区中,即可得到针对目标参数的多个批次的数据,所述预设批次可以根据实际情况进行调整。
138.步骤s80,通过预设寻优算法根据所述仿真数据得到目标仿真结果。
139.更进一步地,在相同工况下,改变某一结构的目标参数,例如制动蓄能器的蓄能力大小、电磁阀开度大小,从而对多次运行产生的多组性能指标的仿真数据进行分析,包括且不限于制动时间、制动时车辆的稳定性、蓄能器制动液流量、电磁阀开闭次数。例如根据电机提供的不同大小的制动力,求得制动器制动力大小及响应时间,最终根据成本、功能需求等选用合适制动力对应的电机。通过设计优化目标及多参数对应权重,提供寻优算法得出该工况下的最优参数,即为目标仿真结果。
140.本实施例通过上述方案,具体通过根据预设步长调整所述控制器系统模型、所述液压制动系统模型或所述整车模型中的目标参数;基于所述目标参数重复执行联合仿真,直至得到预设批次的仿真数据;通过预设寻优算法根据所述仿真数据得到目标仿真结果。通过针对仿真结果进行参数优化,对多次运行产生的多组性能指标的仿真数据进行分析,通过寻优算法得到对应工况下的最优参数,从而提高了制动系统的性能。
141.此外,本发明实施例还提出一种车辆制动联合仿真装置,所述车辆制动联合仿真
装置包括:
142.获取模块,用于通过整车模型获取车况信息;
143.控制模块,用于通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;
144.制动模块,用于通过液压制动系统模型根据所述控制信号生成制动器制动力信息;
145.反馈模块,用于通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;
146.调整模块,用于根据所述车况反馈信息调整制动策略,生成仿真结果。
147.参照图5,图5为本发明实施例中的整车多软件联合仿真建模系统的原理示意图,如图5所示,根据多类型软件联合仿真及数据交互方法,通过接口设置实现配备制动系统精确模型的整车在多种复杂工况、多种控制方法下的动力学仿真,并基于仿真结果提出性能参数优化的方法,具体步骤包括:
148.1、设置simulink起始位置路径及计算机系统环境变量,以visual studio为代码编译程序,设置各软件求解器调用文件,设置联合仿真环境;以simulink为联合仿真的中间软件,创建simulink与amesim、simulink与carsim的仿真接口,支持信号的传递。
149.参照图6,图6为本发明实施例中基于amesim搭建的集成式电控液压制动系统仿真模型示意图,如图6所示,制动系统仿真模型包括14个电磁阀、4个制动器及电缸、滚珠丝杠、电机等电驱部分;该模型可以实现踏板制动、电驱制动等多功能,并将参数通过传感器输入联合仿真接口,供simulink控制策略调用;并接收simulink发入的控制信号,以控制各阀的开闭及电机驱动力的大小。
150.参照图7,图7为本发明实施例中simulink软件中与amesim及carsim的联合仿真接口示意图,如图7所示,通过联合仿真接口可以进行信号的实时传递,在simulink中的控制模块中,根据制动决策需求、制动强度需求等信息,可以控制制动请求信号,实现合理的制动控制,并集成入车辆稳定性判断、abs控制系统等功能,以支持智能驾驶。
151.2、模型的搭建:在amesim中利用hydraulic、signal and control等库中的各模块,搭建支持踏板制动、电控制动等功能的液压制动系统,并通过传感器模块获取制动器制动力,作为amesim与simulink联合仿真接口的输入,该接口同时获取simulink向amesim发送的各电磁阀及电机控制信号;在carsim中搭建整车及车载传感器模型,包括激光雷达、组合导航仪、轮速传感器等,并通过联合仿真接口向simulink输入路面附着系数信息、障碍物信息、车辆多自由度运动信息、车轮转速信息等,并接收amesim经由simulink处理后传递的制动器制动力信息,同时收到来自simulink控制策略的目标车速;在联合仿真中间的simulink模型中具有两个联合仿真接口,分别与amesim和carsim进行信息传递,在模型中具有基于传感器信号的稳定性判别、abs控制等模块,对车辆的制动进行决策与控制,并支持智能驾驶的功能。
152.3、联合仿真时设置三软件联仿步长相等,例如0.5ms。仿真过程中可以进行批次处理及数据的存储。针对改变同一参数的重复仿真,可以进行批次处理,并将数据导入matlab的工作区。由于联合仿真的指令接口位于simulink,故可以在matlab设置批次处理的脚本,自动多次运行simulink程序并改变部分参数,最终将simulink程序运行的结果以多个数值
矩阵的形式导入工作区中。
153.4、针对仿真结果进行参数优化。在相同工况下,改变某一结构参数,例如制动蓄能器的蓄能力大小、电磁阀开度大小,分析多次运行产生的多组性能指标数据,包括且不限于制动时间、制动时车辆的稳定性、蓄能器制动液流量、电磁阀开闭次数。设计优化目标及多参数对应权重,提供寻优算法得出该工况下的最优参数。
154.参照图8,图8为本发明实施例中联合仿真运行成功后的可视化功能示意图,如图8所示,车载激光雷达等传感器识别到了道路上的其他车辆,并基于这些信息进行制动。
155.在本实施例中,通过一种针对集成式电控液压制动系统及所适配整车的建模、道路运行仿真、结构参数优化的方法,针对性地采用不同优势的软件进行联合仿真,包括但不限于amesim、simulink、carsim,发挥出各自对某一领域仿真的高准确性优势;仿真中设置合理的系统物理、控制结构,并高效搭建联合仿真接口、设计数据流,实现多软件复杂模型的高效联合仿真;根据试验数据,采用科学有效的方法进行系统参数的匹配及优化,使得系统在保证响应速度、满足制动力需求的同时,实现效率的提高,结构的紧凑化,且仿真优化结果可以应用于实车。
156.此外,本发明实施例还提出一种终端设备,所述终端设备包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的车辆制动联合仿真程序,所述车辆制动联合仿真程序被所述处理器执行时实现如上所述的车辆制动联合仿真方法的步骤。
157.由于本车辆制动联合仿真程序被处理器执行时,采用了前述所有实施例的全部技术方案,因此至少具有前述所有实施例的全部技术方案所带来的所有有益效果,在此不再一一赘述。
158.此外,本发明实施例还提出一种计算机可读存储介质,所述计算机可读存储介质上存储有车辆制动联合仿真程序,所述车辆制动联合仿真程序被处理器执行时实现如上所述的车辆制动联合仿真方法的步骤。
159.由于本车辆制动联合仿真程序被处理器执行时,采用了前述所有实施例的全部技术方案,因此至少具有前述所有实施例的全部技术方案所带来的所有有益效果,在此不再一一赘述。
160.相比现有技术,本发明实施例提出的车辆制动联合仿真方法、装置、终端设备以及存储介质,通过整车模型获取车况信息;通过控制器系统模型根据所述车况信息进行决策,生成控制信号与目标车速;通过液压制动系统模型根据所述控制信号生成制动器制动力信息;通过所述整车模型根据所述制动器制动力信息与所述目标车速生成车况反馈信息;根据所述车况反馈信息调整制动策略,生成仿真结果。通过液压制动系统模型、整车模型以及控制器系统模型,进行联合仿真,充分发挥各系统模型的专业性,对整车复杂车况下的制动系统工作情况进行研究,提高了制动控制的准确性,从而提高了制动系统的性能。
161.需要说明的是,在本文中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者系统不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者系统所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括该要素的过程、方法、物品或者系统中还存在另外的相同要素。
162.上述本技术实施例序号仅仅为了描述,不代表实施例的优劣。
163.通过以上的实施方式的描述,本领域的技术人员可以清楚地了解到上述实施例方法可借助软件加必需的通用硬件平台的方式来实现,当然也可以通过硬件,但很多情况下前者是更佳的实施方式。基于这样的理解,本技术的技术方案本质上或者说对现有技术做出贡献的部分可以以软件产品的形式体现出来,该计算机软件产品存储在如上的一个存储介质(如rom/ram、磁碟、光盘)中,包括若干指令用以使得一台终端设备(可以是手机,计算机,服务器,被控终端,或者网络设备等)执行本技术每个实施例的方法。
164.以上仅为本发明的优选实施例,并非因此限制本发明的专利范围,凡是利用本发明说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其他相关的技术领域,均同理包括在本发明的专利保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
