1.本发明涉及一种考虑转向特性的驱动滑转率修正方法,属于车辆控制技术领域。
背景技术:
2.由于驱动滑转率对车辆的转向特性有很大影响。当车辆转弯并加速时,转向所需力会由来自驱动轮的有效侧向力提供。对于前驱车型,转弯时加速将导致不足转向趋势增加,而后驱车辆将倾向于过度转向。因此,为了实现最大牵引能力和最优转向特性,车辆的目标驱动滑转率的选择将十分重要。
3.现有的车辆驱动滑转率主要通过驱动防滑(asr)模块计算得到,而asr模块一般只能根据车辆和车轮的纵向力学信息来确定驱动滑转率,没有考虑车辆及车轮的侧向力学信息。然而,为了增强车辆的转向性能,需要对车辆及车轮当前的侧向力学信息进行考虑。因此,本发明提出一种考虑转向特性的驱动滑转率修正方法,根据车辆的侧向动力学信息来修正asr模块计算得到的目标滑转率。主要是通过车辆的实际驱动状况计算得到滑转率修正量,然后将asr模块计算得到的驱动滑转率加上滑转率修正量得到最终的目标驱动滑转率。
技术实现要素:
4.本发明旨在为车辆提供考虑转向特性后的目标驱动滑转率,以实现车辆的最大牵引能力和最优转向特性。
5.本发明是采用如下技术方案实现的:
6.步骤一:首先确定车辆的状态,判断车辆是否处于过度转向或不足转向状态,并设置相应的标志位,计算相应的转向系数。
7.首先通过测量横摆角速度控制偏差δω
x
,采用比较δω
x
与门限值等方式来判断车辆是否处于过度转向和不足转向状态。当车辆正处于过度(不足)转向状态或者刚经历过度(不足)转向时,设置对应过度(不足)转向的标志位,根据标志位计算相应的转向系数。
8.过度转向系数u
over
的计算方式为:
[0009][0010]
其中,为基于纵向车速v
x
的增益,通过查表得到;δω
′
x
为修正后的横摆角速度控制偏差,针对横摆角速度控制偏差δω
x
的修正,主要是为了补偿转向角和侧风的影响。u
over
被限制在0(无过度转向)和1(严重过度转向)之间。
[0011]
不足转向系数u
under
的计算方式为:
[0012][0013]
其中,为实际横摆角速度相关的增益;ωa为阿克曼目标横摆角速度;ωe为实际横摆角速度与实际横摆角速度滤波值的加权平均值;(ω
a-ωe)
′
为(ω
a-ωe)的修正值,针对阿克曼目标横摆角速度的修正主要是为了防止在快速转向过程中过早检测到不足转向。uunder
被限制在0(无不足转向)和1(严重不足转向)之间。
[0014]
步骤二:计算车辆的后轴侧偏角系数u
rear
:
[0015]
车辆的后轴侧偏角系数u
rear
的计算方式为:
[0016][0017]
其中,θ为测量得到的侧偏角,θ
int
为通过积分得到的侧偏角,p
θ
为测量侧偏角的加权系数,为积分侧偏角的加权系数,θ
max
为最大允许侧偏角,基于附着系数μ和纵向车速v
x
的增益(通过查表方式求得)。u
rear
被限制在0到1之间。
[0018]
步骤三:计算发动机转矩系数u
mot
:
[0019]
当出现高侧向加速度和小发动机转矩情况时,其他稳定性系数(u
over
,u
under
,u
rear
)需求的asr的目标滑转率的减小量将被减少。发动机转矩系数u
mot
则用于抵消这三个系数的作用,其目的是在某些减小发动机转矩不太有效的情况下,避免发动机转矩下降过多。
[0020]
发动机转矩系数的计算方式为:
[0021]umot
=p
mot
·
(t
′
mot-t
mot
)
[0022]
其中p
mot
为发动机转矩系数增益,t
mot
为发动机转矩,t
′
mot
为基于侧向加速度修正的发动机转矩(查表得到)。u
mot
被限制在0到1之间。
[0023]
步骤四:求解目标滑转率系数us:
[0024]us
主要用于确定asr的目标滑转率,可通过对过度转向(u
over
)、不足转向(u
under
)、后轴侧偏角(u
rear
)和发动机转矩(u
mot
)这些驱动稳定性系数进行加权求和来求解,并限制结果在0到1之间。根据实际运行情况对求得的结果进行滤波得到最终目标滑转率系数us,可主动用于减小asr的平均目标滑转率。
[0025]us
=filter[p
overuover
p
underuunder
p
rearurear-p
motumot
]
[0026]
其中,p
over
为过度转向系数权重,p
under
为不足转向系数权重,p
rear
为后轴侧偏角系数权重,p
mot
为发动机转矩系数权重,filter代表进行滤波处理。
[0027]
步骤五:计算目标滑转率偏移量δs以及最终的滑转率s
final
:
[0028]
目标滑转率偏移量δs的计算方式为:
[0029]
δs=(s-s
min
)
·
(-us)
[0030]
其中,s为asr模块计算得到的目标驱动滑转率;s
min
为最小驱动滑转率,与纵向车速v
x
、摩擦系数μ、侧向加速度以及不足转向系数u
under
相关;目标滑转率偏移量δs>0则表示需要增加车辆滑转率,目标滑转率偏移量δs<0则表示要减小车辆滑转率。
[0031]
最终的滑转率s
final
的计算方式为:
[0032]sfinal
=s δs。
[0033]
与现有技术相比本发明的有益效果是:
[0034]
1.由于驱动滑转率对车辆的转向特性有很大影响,因此本发明提出一种考虑转向特性的驱动滑转率修正方法,通过修正驱动滑转率来保证车辆的转向特性。
[0035]
2.相较于传统的驱动滑转率计算,本文在考虑纵向动力学信息的同时,将车辆的侧向动力学信息融入到驱动滑转率的计算当中,可保证车辆最大牵引能力和最优转向特性。
附图说明
[0036]
下面结合附图对本发明作进一步的说明:
[0037]
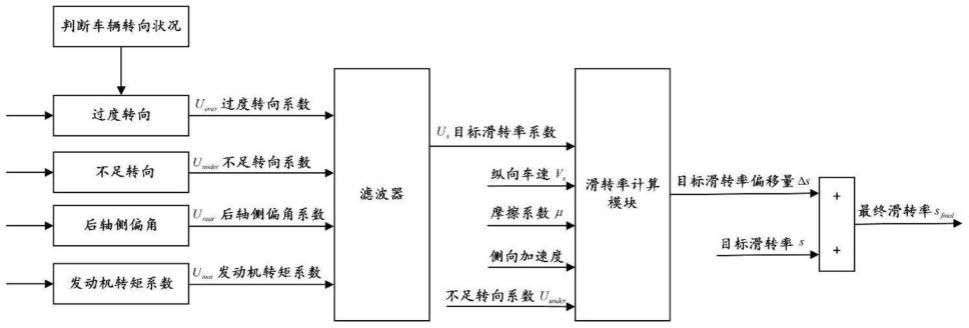
图1驱动滑转率修正方法总流程图
[0038]
图2后轴侧偏角系数计算流程图
[0039]
图3目标滑转率系数计算流程图
具体实施方式
[0040]
参阅图1,本发明是采用如下技术方案实现的:
[0041]
步骤一:首先确定车辆的状态,判断车辆是否处于过度转向或不足转向状态,并设置相应的标志位,计算相应的转向系数。
[0042]
首先通过测量横摆角速度控制偏差δω
x
,采用比较δω
x
与门限值等方式来判断车辆是否处于过度转向和不足转向状态。当车辆正处于过度(不足)转向状态或者刚经历过度(不足)转向时,设置对应过度(不足)转向的标志位,根据标志位计算相应的转向系数。
[0043]
过度转向系数u
over
的计算方式为:
[0044][0045]
其中,为基于纵向车速v
x
的增益,通过查表得到;δω
′
x
为修正后的横摆角速度控制偏差,针对横摆角速度控制偏差δω
x
的修正,主要是为了补偿转向角和侧风的影响。u
over
被限制在0(无过度转向)和1(严重过度转向)之间。
[0046]
不足转向系数u
under
的计算方式为:
[0047][0048]
其中,为实际横摆角速度相关的增益,ωa为阿克曼目标横摆角速度,ωe为实际横摆角速度与实际横摆角速度滤波值的加权平均值,(ω
a-ωe)
′
为(ω
a-ωe)的修正值,针对阿克曼目标横摆角速度的动态修正主要是为了防止在快速转向过程中过早检测到不足转向。u
under
被限制在0(无不足转向)和1(严重不足转向)之间。
[0049]
步骤二:参阅图2,计算车辆的后轴侧偏角系数u
rear
:
[0050]
车辆的后轴侧偏角系数u
rear
的计算方式为:
[0051][0052]
其中,θ为测量得到的侧偏角,θ
int
为通过积分得到的侧偏角,p
θ
为测量侧偏角的加权系数,为积分侧偏角的加权系数,θ
max
为最大允许侧偏角,基于附着系数μ和纵向车速v
x
的增益(通过查表方式求得)。u
rear
被限制在0到1之间。
[0053]
步骤三:计算发动机转矩系数u
mot
:
[0054]
当出现高侧向加速度和小发动机转矩情况时,其他稳定性系数(u
over
,u
under
,u
rear
)需求的asr的目标滑转率的减小量将被减少。发动机转矩系数u
mot
则用于抵消这三个系数的作用,其目的是在某些减小发动机转矩不太有效的情况下,避免发动机转矩下降过多。
[0055]
发动机转矩系数的计算方式为:
[0056]umot
=p
mot
·
(t
′
mot-t
mot
)
[0057]
其中p
mot
为发动机转矩系数增益,t
mot
为发动机转矩,t
′
mot
为基于侧向加速度修正的发动机转矩(查表得到)。u
mot
被限制在0到1之间。
[0058]
步骤四:参阅图3,求解目标滑转率系数us:
[0059]us
主要用于确定asr的目标滑转率,可通过对过度转向(u
over
)、不足转向(u
under
)、后轴侧偏角(u
rear
)和发动机转矩(u
mot
)这些驱动稳定性系数进行加权求和来求解,并限制结果在0到1之间。根据实际运行情况对求得的结果进行滤波得到最终目标滑转率系数us,可主动用于减小asr的平均目标滑转率。
[0060]us
=filter[p
overuover
p
underuunder
p
rearurear-p
motumot
]
[0061]
其中,p
over
为过度转向系数权重,p
under
为不足转向系数权重,p
rear
为后轴侧偏角系数权重,p
mot
为发动机转矩系数权重,filter代表进行滤波处理。
[0062]
步骤五:计算目标滑转率偏移量δs以及最终的滑转率s
final
:
[0063]
目标滑转率偏移量δs的计算方式为:
[0064]
δs=(s-s
min
)
·
(-us)
[0065]
其中,s为asr模块计算得到的目标驱动滑转率;s
min
为最小驱动滑转率,与纵向车速v
x
、摩擦系数μ、侧向加速度以及不足转向系数u
under
相关;目标滑转率偏移量δs>0则表示需要增加车辆滑转率,目标滑转率偏移量δs<0则表示要减小车辆滑转率。
[0066]
最终的滑转率s
final
的计算方式为:
[0067]sfinal
=s δs。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
