1.本发明专利涉及无人机结构设计技术领域,特别是涉及一种变结构四旋翼无人机。
背景技术:
2.随着无人机技术的发展,相关应用技术和设备研发取得了重大突破,无人机技术和相关产品越来越多地被应用在民用领域;无人机研究的初衷就是减少人力损耗,保障人身安全,对于一些存在安全隐患的危险复杂环境,一般人员无法正常到达,因此,针对在复杂环境下工作的无人机的研究就显得十分重要;在抢险救灾或地质勘探等实际行动中,由于实地环境一般难以预测且安全隐患很多,人员无法到达,因此在这些场景中工作的无人机应具备一定的可变性结构,且兼具灵活性和动态感知性来面对此类复杂环境下工作的考验;这就需要对无人机可变结构进行相应的研究和创新。
技术实现要素:
3.本发明专利的目的在于提供一种具有可变结构的四旋翼无人机,以解决上述背景技术中提出的问题。
4.为实现上述目的,本发明专利提供如下技术方案:一种变结构四旋翼无人机,其特征在于:所述的四旋翼无人机由机臂驱动齿轮、内段机臂、外段机臂、电机倾转机构限位驱动齿轮、电机座、电机倾转机构从动齿轮、顶板、中间隔板、底板、40a电调、2212无刷电机、电机倾转机构伺服电机和外段机臂驱动伺服电机组成;所述四旋翼无人机的机臂由内段机臂和外段机臂两部分组成,且机体由顶板、中间隔板和底板上下堆叠组装而成;所述内段机臂一端通过齿轮结构与机臂驱动齿轮啮合,所述内段机臂的另一端通过外段机臂驱动伺服电机的转轴与外段机臂的一端连接;所述外段机臂上开有外段机臂驱动伺服电机安装槽,用以安装驱动电机倾转机构的伺服电机,外段机臂的一端设置有电机座安装孔,用以与电机座配合;所述电机座与电机倾转机构从动齿轮固定,电机倾转机构从动齿轮与电机倾转机构限位驱动齿轮啮合,共同构成电机倾转机构;所述内段机臂上设计有限位结构,用以对外段机臂转动起限位作用。
5.所述底板上设计有八个螺纹孔,其中,外围的四个螺纹孔用于固定内段机臂的转动轴,内圈的四个螺纹孔用于安装机臂驱动齿轮的转动轴。
6.所述内段机臂的一端设计有限位齿轮结构且与机臂驱动齿轮相啮合,机臂驱动齿轮通过安装在底板上的伺服电机来驱动内段机臂的转动。
7.所述内段机臂和外段机臂的连接段设计有圆形倒角结构,该结构可保证外段机臂旋转的可靠性且具有限位作用。
8.所述电机座的上部平台部分上设计有四个以90度圆周阵列分布的圆形螺纹孔用于安装2212无刷电机。
9.所述电机座的侧面设计有四个以90度圆周阵列分布的圆形螺纹孔,用以安装固定
电机倾转机构从动齿轮。
10.所述内段机臂与外段机臂的连接部分中安装有一个外段机臂驱动伺服电机,用以驱动外段机臂旋转,所述外段机臂通过键连接与外段机臂驱动伺服电机的转轴相连。
11.与现有技术相比,本发明专利的有益效果是。
12.1、本发明专利提供了一种可变结构机臂,该机臂由内段机臂和外段机臂构成,其中,内段机臂可绕机臂驱动齿轮转轴转动,外段机臂可绕内段机臂上安装的伺服电机转轴转动,这一设计可减小变结构四旋翼无人机在飞行时所占用的空间,使无人机可通过狭窄或变形的通道。
13.2、内段机臂设计有圆形倒角结构,该结构可保证外段机臂旋转的可靠性且对外段机臂的旋转具有限位作用。
14.3、内段机臂的一端设计有限位齿轮结构且与机臂驱动齿轮相啮合,机臂驱动齿轮通过安装在底板上的伺服电机来驱动内段机臂的转动。
15.4、电机倾转机构限位驱动齿轮上设计有转动限位结构,可以对电机座的倾转运动起限位作用。
附图说明
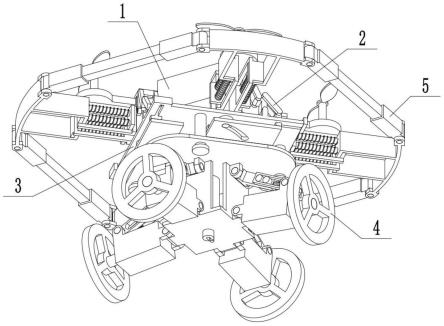
16.图1为本发明专利部分结构图。
17.图2为本发明专利中变结构机臂的结构图。
18.图3为本发明专利中电机座和电机倾转机构从动齿轮结构图。
19.图4为本发明专利中底板的结构图。
20.图5-图7为本发明专利中变结构四旋翼的变形示意图。
21.图中:1、机臂驱动齿轮;2、内段机臂;3、外段机臂;4、电机倾转机构限位驱动齿轮;5、电机座;6、电机倾转机构从动齿轮;7、顶板;8、中间隔板;9、底板;10、40a电调;11、2212无刷电机;12、伺服电机;13、外段机臂驱动伺服电机;14、电机倾转机构驱动伺服电机安装槽;15、外段机臂上的电机座安装孔;16、电机座侧边螺纹孔;17、电机倾转机构从动齿轮固定螺纹孔;18、底板扩展槽;19、底板安装螺纹孔。
具体实施方式
22.下面将结合本发明专利实施例中的附图,对本发明专利实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明专利一部分实施例,而不是全部的实施例。基于本发明专利中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明专利保护的范围。
23.请参阅图1-图7,本发明专利提供如下技术方案:一种变结构四旋翼无人机,其特征在于:所述的四旋翼无人机由机臂驱动齿轮、内段机臂、外段机臂、电机倾转机构限位驱动齿轮、电机座、电机倾转机构从动齿轮、顶板、中间隔板、底板、40a电调、2212无刷电机、电机倾转机构伺服电机和外段机臂驱动伺服电机组成;所述四旋翼无人机的机臂由内段机臂和外段机臂两部分组成,且机体由顶板、中间隔板和底板上下堆叠组装而成;所述内段机臂一端具有限位齿轮结构且与机臂驱动齿轮啮合,所述内段机臂的另一端为一转动机构,通过内部安装的外段机臂驱动伺服电机的转轴与外段机臂的一端连接;所述外段机臂上开有
方形孔,用以安装驱动电机倾转机构的伺服电机,外段机臂的一端设置有一圆形孔,用以与电机座配合;所述电机座与电机倾转机构从动齿轮固定,电机倾转机构从动齿轮与电机倾转机构限位驱动齿轮啮合,共同构成电机倾转机构;所述内段机臂与外段机臂的连接段设计有限位结构。
24.本发明专利中,所述顶板(7)和中间隔板(8)、底板(9)和中间隔板(8)之间分别通过八根螺纹杆连接,其中四根螺纹杆为所述内段机臂的旋转轴,另外四根为机臂驱动齿轮的旋转轴。
25.本发明专利中,电机座(5)通过四个螺纹孔和螺钉和电机倾转机构从动齿轮(6)连接,使两者能同时被电机倾转机构限位驱动齿轮(4)驱动旋转。
26.本发明专利中,顶板(7)、中间隔板(8)和底板(9)的制作材料为沉金材质,且可在其上焊接电源线、电调线等。
27.本发明专利中,内段机臂(2)中安装有深沟球轴承,可以保证在被机臂驱动齿轮(1)驱动时,内段机臂的正常转动。
28.本发明专利中,驱动电机倾转机构的伺服电机(12)通过螺纹连接安装在外段机臂的电机倾转机构驱动伺服电机安装槽中。
29.本发明专利中,驱动内段机臂(2)转动的伺服电机通过螺纹连接安装在无人机的底板上且与内段机臂转动轴连接。
30.本发明专利中,所述顶板(7)、中间隔板(8)和底板(9)上设计有扩展槽,可用于扩展起落架、相机安装结构等。
31.本发明专利中,所述内段机臂上设计有限位结构,用于对外段机臂的纵向旋转起限位作用,避免外段机臂的下垂。
32.工作原理:所述变结构四旋翼无人机的机臂由内段机臂和外段机臂组成,且安装有可变形机构。所述内段机臂与所述机臂驱动齿轮相啮合,从而构成内段机臂变形机构,使内段机臂可绕机臂驱动齿轮的转动轴横向转动,从而可以减小四旋翼飞行器的宽度;内段机臂上安装有外段机臂驱动伺服电机,所述外段机臂通过键与外段机臂驱动伺服电机转轴连接,外段机臂驱动伺服电机的转动可带动外段机臂的纵向转动,从而可以减小四旋翼飞行器在纵向上的面积;所述电机座与电机倾转机构从动齿轮固连,通过电机倾转机构驱动齿轮的带动,电机座可实现前后的倾转,在变形过程中电机的倾转可以保证四旋翼飞行器的飞行稳定性,使旋翼产生的升力方向始终垂直机体向上;通过上述机臂的变形原理,可以使四旋翼无人机拥有多种变形结构,如图5、图6、图7所示,从而可以使四旋翼飞行器更灵活地在狭窄的空间中飞行和工作。
33.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
34.尽管已经示出和描述了本发明专利的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明专利的的原理和精神的情况下可以对这些实施例进行多种变化、
修改、替换和变型,本发明专利的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。