1.本发明涉及藻类清洁技术领域,尤其涉及一种藻类清洁无人船。
背景技术:
2.当今,随着人民生活水平的提升,越来越多的人开始意识到治理水污染的重要性。在水污染中,较为严重的是水体富营养化污染。当过量营养进入湖泊、水库、河口、海湾等缓流水体后,藻类将大量繁殖,使水的透明度降低,阳光难以穿透水层,从而影响水中植物的光合作用,还可能造成溶解氧的过饱和状态,危害水生动物,造成鱼类大量死亡。因此,如何选用切实可行的除藻技术已成为亟待解决的重点和难点。
3.针对中小型湖泊(水库)水域环境的治理,目前最常用且技术最成熟的是化学除藻技术,即通过投加除藻剂来达到抑制藻类生长的目的,然而这种方式会因死亡藻类释放的藻毒产生二次污染,甚至会造成生态失衡,负面作用大,因此,采用打捞船直接对海藻进行打捞是最环保、效率最好的方式,但是现有技术中的打捞船无法同时满足装载空间大且转向灵活的要求。
技术实现要素:
4.有鉴于此,有必要提供一种藻类清洁无人船,用以解决现有技术中打捞船不能同时满足装载空间大且转向灵活的问题。
5.本发明提供一种藻类清洁无人船,包括:至少两个船体、至少一个箱体和多个连接桥,多个所述船体间隔分布,各个所述船体内部具有多个放置舱体,多个所述船体和多个所述箱体呈阵列交错分布,任意一个所述箱体的两侧均分布有所述船体,任意相邻的所述船体和所述箱体之间均安装有所述连接桥,所述连接桥的两侧分别连接于所述船体和所述箱体。
6.进一步的,各个所述船体的两端均呈流线型分布。
7.进一步的,各个所述船体的船头位于同一水平位置。
8.进一步的,所述箱体内部具有至少两个箱室,两个所述箱室沿所述船体的长度方向间隔分布。
9.进一步的,所述箱室的内部具有多个凸起,多个所述凸起绕所述箱室的内壁周向间隔分布,各个所述凸起沿所述箱室内壁的同一高度分布,各个所述凸起的尺寸一致。
10.进一步的,所述箱室还包括盖板,所述盖板铰接于所述箱室的一侧。
11.进一步的,所述连接桥呈块状,所述连接桥的长度与所述箱体的长度一致并沿所述箱体的长度方向分布于所述箱体和所述船体之间,所述连接桥具有第一面和第二面,所述第一面固定连接于所述船体,所述第二面固定连接于所述箱体。
12.进一步的,所述藻类清洁无人船还包括夹板,所述加班包括前甲板和后甲板,所述前甲板的面积大于所述后甲板的面积,所述前甲板铺设于清洁无人船的船头位置,所述后甲板铺设于清洁无人船的船尾位置。
13.进一步的,所述藻类清洁无人船还包括防撞护栏,所述防撞护栏绕所述藻类清洁无人船周向分布,并与所述藻类清洁无人船具有一设定间距。
14.进一步的,所述藻类清洁无人船还包括风扇组,所述风扇组包括横梁和风扇,所述横梁架呈倒u形设于藻类清洁无人船的上方,所述风扇固定连接于所述横梁的中部。
15.本发明所采用的藻类清洁无人船,与现有技术相比,通过设置多个船体相连的结构,相比于同等宽度的大船体,小船体受到的波动绕动力小,耐波性好,并且多个船体相连使得水下侧面积大,有效提升了操纵稳定性;同时通过在双船体之间设置箱体,一方面能够利用箱体装载收集的藻类,另一方面能够增加甲板的面积,使得清洁无人船的布设更加优化。
16.上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例详细说明如后。
附图说明
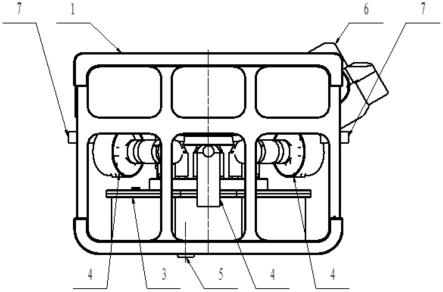
17.图1为本发明提供的藻类清洁无人船一实施例的结构示意图;
18.图2为本发明提供的藻类清洁无人船实施例另一角度的结构示意图;
19.图3为本发明提供的藻类清洁无人船实施例另一角度的结构示意图;
20.图4为本发明提供的藻类清洁无人船实施例另一角度的结构示意图。
具体实施方式
21.下面结合附图来具体描述本发明的优选实施例,其中,附图构成本技术一部分,并与本发明的实施例一起用于阐释本发明的原理,并非用于限定本发明的范围。
22.需要说明的是,本专利所涉及的藻类清洁无人船适用于针对中小型湖泊、水库、人工景观水域水体表面的基于磁水分离技术的智能藻类清洁机器人。利用该机器人控制藻类清洁无人船吸附含藻类的水,并且在低强度超声波下加入磁捕剂絮凝,形成具有磁性的聚集体,磁聚集体被磁盘吸引并随之转动,从而与水体分离,最后将吸入的水排出,留下藻类;最后与岸边控制台进行通信,运输船搭载空储藻箱与清洁无人船进行精确对接,利用储藻箱切换装置将藻类清洁无人船上装满藻饼的储藻箱与空箱进行切换,运输船搭载满载储藻箱回到岸边,进行人工处理;通过将机器人自动化系统与藻类磁捕技术相结合,能够进行高效全自动化的水面清洁作业,其效率高于同等规模装置的5-6倍,因此,设计的一款集自主清除水表藻类与化学抑制富营养化于一体的机器人,其除藻能力强、操作简单、动作灵活,有较好的市场前景。并且通过采用藻类清洁无人船与机器人相结合,能够实现自动化控制船只在水面的行动,相比现有的除藻技术具有能耗小、效果好、成本适中、污染小等特点。
23.本发明实施例提供的一种藻类清洁无人船,如图1-4所示,至少两个船体1、至少一个箱体2和多个连接桥(未在图中示出),多个所述船体1间隔分布,各个所述船体1内部具有多个放置舱体,多个所述船体1和多个所述箱体2呈阵列交错分布,任意一个所述箱体2的两侧均分布有所述船体1,所述箱体2的高度小于所述船体1的高度且所述箱体2和所述船体1的上端面平齐,任意相邻的所述船体1和所述箱体2之间均安装有所述连接桥,所述连接桥的两侧分别连接于所述船体1和所述箱体2。
24.在本实施例中,通过设置多个船体1相连的结构,相比于同等宽度的大船体,多个
相连的船体1受到的波动绕动力小,耐波性好,并且多个船体1相连使得水下侧面积大,有效提升了操纵稳定性;同时通过在双船体1之间设置箱体2,一方面能够利用箱体2装载收集的藻类,另一方面能够增加甲板的面积,使得清洁无人船的布设更加优化。
25.需要说明的是,在本实施例中,船体1主要用于行使其基本功能,实现在水面的航行,同时承载箱体2一同运动,船体1上布置有与机器人配合的各种电路设备和软硬件、藻类净化装置,并且各个船体1的内部均安装有推进器,采用推进器给船体1提供快速行进的动力;箱体2主要用于提供承载除藻箱的空间和平台,同时配合清洁无人船进行除藻,并将吸附的藻类存储至箱体2内部。
26.其中,需要说明的是,船体1的数目可为两个、三个、四个或多个,船体1的数目越多,能够一次性装载更多的藻类,可以理解的是,藻类的数目过多,会影响清洁无人船的操纵稳定性以及转向灵动性,因此,船体1的数目选择要适当;箱体2的数目可为一个、两个、三个或多个,箱体2的数目与船体1的数目相关,箱体2始终处于两个船体1之间,其中,箱体2的数目越多,可承载的藻类越多;于本实施例中,船体1的数目为两个,相应的,箱体2的数目为一个。
27.在一些更为优选的方案中,藻类清洁无人船还包括激光雷达、gps定位系统、反光灯、航标灯、气管等结构。
28.在一些实施例中,各个所述船体1的两端均呈流线型分布。
29.需要说明的是,为了保证清洁无人船在水中航行的灵活性,将船体1的两端设计成流线型,减小了航行时遇水阻力,以及通过减少水下面积,能够减小水下波动,提升船体1的耐波性。
30.在一些实施例中,各个所述船体1的船头位于同一水平位置。
31.需要说明的是,将船体1沿同一水平位置布置,能够保证各个船体1在前进时不会受到来自其它船体1航行时的水波干扰;其中,于本实施例中,各个船体1的尺寸一致。
32.在一些实施例中,所述箱体2内部具有至少两个箱室21,两个所述箱室21沿所述船体1的长度方向间隔分布。
33.需要说明的是,箱体2主要用于装载与机器人控制的运输船对接的储藻箱,储藻箱以空箱的形式放置在箱体2中,使被吸附的藻类存储在储藻箱中,当储藻箱装满藻类后,则通过机器人控制运输船与清洁无人船对接,将箱体2中的满载储藻箱运走,并重新放置空箱的储藻箱至箱体2中,箱体2的尺寸足够大,要保证至少能够容纳两个储藻箱;因此,为了保证移动其中一个储藻箱时,其它储藻箱的位置不受影响,将箱体2内部分隔成多个箱室21,每个箱室21对应放置一个储藻箱。
34.在一些实施例中,所述箱室21的内部具有多个凸起,多个所述凸起绕所述箱室21的内壁周向间隔分布,各个所述凸起沿所述箱室21内壁的同一高度分布,各个所述凸起的尺寸一致。
35.需要说明的是,为了保证清洁无人船在移动过程中,储藻箱能够被固定住,因此在箱室21内部设置了多个凸起,其中凸起与储藻箱上的弹性卡槽配合,并且为了便于设置储藻箱上的弹性卡槽,将凸起的高度设置成一致的。
36.在一些实施例中,所述箱室21还包括盖板,所述盖板铰接于所述箱室21的一侧。
37.需要说明的是,为了保证箱室21内部环境的整洁,在箱室21上设置了铰接的盖板。
38.在一些实施例中,所述连接桥呈块状,所述连接桥的长度与所述箱体2的长度一致并沿所述箱体2的长度方向分布于所述箱体2和所述船体1之间,所述连接桥具有第一面和第二面,所述第一面固定连接于所述船体1,所述第二面固定连接于所述箱体2。
39.需要说明的是,连接桥主要起连接船体1和箱体2的作用,通过采用连接桥连接船体1和箱体2,能够避免出现船体1和箱体2直接连接而不稳固的问题产生,连接桥的形式不作限定,连接桥可为块状板材形结构、也可为连接键、连接钉等形式,于本实施例中,连接桥为块状结构,块状结构的连接桥一面与船体1连接、另一面与箱体2连接,其中,为了增加连接的紧密性和稳固性,连接桥的长度与箱体2的长度一致。
40.在一些实施例中,所述藻类清洁无人船还包括甲板4,所述甲板4包括前甲板41和后甲板42,所述前甲板41的面积大于所述后甲板42的面积,所述前甲板41铺设于清洁无人船的船头位置,所述后甲板42铺设于清洁无人船的船尾位置。
41.需要说明的是,通过设置甲板4,能够将船体1内部的结构保护起来。
42.在一些实施例中,所述藻类清洁无人船还包括防撞护栏5,所述防撞护栏5绕所述藻类清洁无人船周向分布,并与所述藻类清洁无人船具有一设定间距。
43.需要说明的是,通过设置防护撞烂5,能够避免船体1在行进中发生碰撞导致船体1的损坏。
44.在一些实施例中,所述藻类清洁无人船还包括风扇组6,所述风扇组6包括横梁61和风扇62,所述横梁架61呈倒u形设于藻类清洁无人船的上方,所述风扇62固定连接于所述横梁的中部。
45.相对于现有技术,本发明实施例通过设置双船体结构与箱体连接,船体的耐波性好,推进效率高,操纵性好。
46.以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技术范围内,可轻易想到的变化或替换,都应涵盖在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。