技术特征:
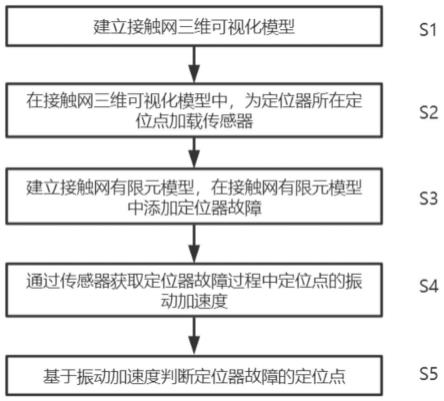
1.接触网定位器故障的定位方法,其特征在于:所述方法包括:建立接触网三维可视化模型;在接触网三维可视化模型中,为定位器所在定位点加载传感器;建立接触网有限元模型,在接触网有限元模型中添加定位器故障,包括:利用接触网三维可视化模型的节点信息,建立接触网有限元模型,在接触网有限元模型中添加定位器故障,添加定位器故障的等效方法包括:将定位器故障分为定位器线夹脱落故障和定位器钩环脱落故障;将定位器线夹脱落故障等效为删除定位器单元;将定位器钩环脱落故障等效为删除定位器单元,并同时将定位器的重力施加到连接处的接触线上;通过传感器获取定位器故障过程中定位点的振动加速度;基于振动加速度判断定位器故障的定位点。2.根据权利要求1所述的方法,其特征在于:基于振动加速度判断定位器故障的定位点包括:根据定位点的振动加速度计算水平方向振动加速度的一阶振动频率的统计最小值,统计最小值为异常值的定位点为定位器故障的定位点。3.根据权利要求1所述的方法,其特征在于:基于振动加速度判断定位器故障的定位点包括:根据定位点的振动加速度计算水平方向振动加速度最大幅值的统计最大值,统计最大值为异常值的定位点为定位器故障的定位点。4.根据权利要求1所述的方法,其特征在于:基于振动加速度判断定位器故障的定位点包括:根据定位点的振动加速度计算水平方向振动加速度从起振到最大幅值的振动响应时间的最小值,最小值为异常值的定位点为定位器故障的定位点。5.根据权利要求1所述的方法,其特征在于:建立接触网三维可视化模型包括:设定接触网几何参数,设定接触网材料参数,设定传感器的类型及安装位置;对接触网进行静力学求解,建立接触网的静力学平衡数学模型;求解承力索上节点的三维坐标,生成接触网三维可视化模型。6.根据权利要求5所述的方法,其特征在于:所述接触网几何参数包括接触网基本几何参数、锚段关节几何参数、电分相几何参数;所述接触网基本几何参数包括跨距、拉出值、吊弦数量、中间跨数、接触线高度、结构高度、第一弹链吊弦距定位点距离、弹性吊索长度、第一简链吊弦距定位点距离、弹性吊索张力;所述锚段关节几何参数包括五跨锚段关节几何参数和四跨锚段关节几何参数;所述五跨锚段关节几何参数包括前支拉出值、屋脊点抬高、转换柱抬高及结构高度、后支拉出值及跨距;所述四跨锚段关节几何参数包括前支拉出值、腕臂间距、转换柱抬高及结构高度、后支拉出值及跨距;
所述电分相几何参数包括腕臂间距、过渡点抬高及结构高度、右支拉出值、三支柱抬高、左支拉出值、小锚柱抬高及跨距、转换柱是否为弹链、隔离开关承力索高差、转化柱抬高及结构高度;所述接触网材料参数包括接触网零部件的尺寸、重量、张力、弹性模量、泊松比,以及接触网上附加设备的重量;所述传感器的类型包括张力传感器、加速度传感器;所述传感器的安装位置包括接触线、承力索。7.根据权利要求5所述的方法,其特征在于:对接触网进行静力学求解,建立接触网的静力学平衡数学模型包括:s1021:根据接触线的高度信息,求解接触线对吊弦施加的荷载;s1022:根据接触线对吊弦施加的荷载以及吊弦的长度,求解吊弦对承力索施加的荷载;s1023:考虑承力索在不同位置所受的作用力,利用力矩平衡法或有限元法求解承力索的变形量;s1024:根据承力索的变形量,修正吊弦的长度,当吊弦长度的修正量大于设定值时,重复步骤1022-1024;s1025:当吊弦长度的修正量小于设定值时,提取出承力索的变形量,接触网的静力学求解完成。8.根据权利要求5所述的方法,其特征在于:求解承力索上节点的三维坐标,生成接触网三维可视化模型包括:根据承力索的变形量,求解出承力索的三维坐标;根据接触线的三维坐标以及承力索的三维坐标,连接对应的节点,生成吊弦以及弹性吊索的三维坐标;在同一坐标系下按照三维节点进行参数化绘图,生成接触网的三维可视化模型。9.接触网定位器故障的定位系统,其特征在于:所述系统用于完成权利要求1-8任一项所述的方法,包括:接触网模型建立模块,用于建立接触网三维可视化模型;传感器加载模块,用于在接触网三维可视化模型中,为定位器所在定位点加载传感器;故障加载模块,用于建立接触网有限元模型,在接触网有限元模型中添加定位器故障;振动加速度获取模块,用于通过传感器获取定位器故障过程中定位点的振动加速度;计算定位模块,用于基于振动加速度判断定位器故障的定位点。
技术总结
本发明涉及一种接触网定位器故障的定位方法及系统。接触网定位器故障一般通过图像识别甄别定位器故障,实时性差。本方法包括:建立接触网三维可视化模型;在接触网三维可视化模型中,为定位器所在定位点加载传感器;建立接触网有限元模型,在接触网有限元模型中添加定位器故障;通过传感器获取定位器故障过程中定位点的振动加速度;基于振动加速度判断定位器故障的定位点。本发明将定位器故障分成线夹脱落和钩环脱落,前者等效为删除定位器单元,后者等效为删除定位器单元并同时将定位器的重力施加到连接处的接触线上;利用该等效策略对定位器故障进行仿真,能以更加直观的方式反应定位器故障发生时接触网的变化,并对故障进行准确及时地定位。准确及时地定位。准确及时地定位。
技术研发人员:张珹 聂晶鑫 田升平 张学武 李飞 王玉环 吴亚飞 赵玮 郭凤平 邓波 王洪林 陈俊卿
受保护的技术使用者:中铁第一勘察设计院集团有限公司
技术研发日:2022.04.29
技术公布日:2022/8/22
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。