1.本发明关于一种马达控制器,特别是关于一种可降低线圈电流的逆流风险的马达控制器。
背景技术:
2.图1为现有的马达控制器10的示意图。马达控制器10用以驱动一马达,其中马达具有一马达线圈l。马达线圈l具有一第一端点o1与一第二端点o2。马达控制器10具有一开关电路100、一控制单元110以及一霍尔传感器120。开关电路100具有一晶体管101、一晶体管102、一晶体管103以及一晶体管104,用以供应一线圈电流il至马达线圈l。霍尔传感器120产生一霍尔信号vh至控制单元110,用以通知控制单元110切换相位。控制单元110产生一第一控制信号c1、一第二控制信号c2、一第三控制信号c3以及一第四控制信号c4,用以分别控制晶体管101、晶体管102、晶体管103以及晶体管104的导通情形。
3.图2为图1于一第一驱动模式下线圈电流il的方向的示意图。于第一驱动模式下,控制单元110通过控制第一控制信号c1、第二控制信号c2、第三控制信号c3以及第四控制信号c4,用以导通晶体管101与晶体管104且不导通晶体管102与晶体管103。此时电流从端点vcc依序地流向晶体管101、马达线圈l以及晶体管104,用以将能量传送给马达。图3为图1的相关信号的示意图。于第一驱动模式下,第一端点o1的电压为一高位准而第二端点o2的电压为一低位准。然而,为了能顺利启动马达,马达控制器10必须提供足以抵抗静摩擦力的能量,此举会造成换相后马达线圈l仍有残余电流。图4为图1于一第二驱动模式下线圈电流il的方向的示意图。请同时参照图3与图4。当霍尔信号vh从低位准改变成高位准时,马达控制器10从第一驱动模式切换至第二驱动模式。于第二驱动模式下,控制单元110通过控制第一控制信号c1、第二控制信号c2、第三控制信号c3以及第四控制信号c4,用以导通晶体管102与晶体管103且不导通晶体管101与晶体管104。由于切换模式时线圈电流il仍大于0,电感效应或惯性运动会使得线圈电流il维持原本的方向,此时电流从端点gnd依序地流向晶体管102、马达线圈l、晶体管103、最后逆流至端点vcc,造成端点vcc的电压上升。因此,此前案方法容易造成端点vcc的过压问题,以及因为线圈电流il变化剧烈而产生噪音。
技术实现要素:
4.有鉴于前述问题,本发明的目的在于提供一种可降低一线圈电流的逆流风险的马达控制器。
5.依据本发明提供该马达控制器。该马达控制器用以驱动一马达,其中该马达具有一马达线圈。该马达线圈具有一第一端点与一第二端点。该马达控制器具有一开关电路、一控制单元、一相位侦测单元以及一计数单元。该开关电路具有一第一晶体管、一第二晶体管、一第三晶体管以及一第四晶体管,用以供应该线圈电流至该马达线圈。该第一晶体管耦合至一端点vcc与该第一端点而该第二晶体管耦合至该第一端点与一端点gnd。该第三晶体管耦合至该端点vcc与该第二端点而该第四晶体管耦合至该第二端点与该端点gnd。此外,
该开关电路为一h桥式(h-bridge)电路。该第一晶体管与该第三晶体管分别为一上侧开关而该第二晶体管与该第四晶体管分别为一下侧开关。该控制单元产生一第一控制信号、一第二控制信号、一第三控制信号以及一第四控制信号,用以分别控制该第一晶体管、该第二晶体管、该第三晶体管以及该第四晶体管的导通情形。该相位侦测单元产生一相位信号至该控制单元,用以通知该控制单元切换相位。该计数单元接收该相位信号以产生一输出信号至该控制单元。
6.于一第一驱动模式下,控制单元通过控制该第一控制信号、该第二控制信号、该第三控制信号以及该第四控制信号,用以导通该第一晶体管与该第四晶体管且不导通该第二晶体管与该第三晶体管。此时电流从该端点vcc依序地流向该第一晶体管、该马达线圈以及该第四晶体管,用以将能量传送给该马达。
7.当该马达控制器处于一启动状态时,该马达控制器必须提供足以抵抗静摩擦力的能量以启动该马达。当该相位信号从一低位准变化成一高位准时,此时该线圈电流大于0,亦即表示该马达线圈仍有残余电流。因此,本发明一实施例利用一相位延迟机制,用以降低该线圈电流的逆流风险。当该相位信号发生变化时,该马达控制器会启动该相位延迟机制并进入一第二驱动模式。于该第二驱动模式下,该控制单元通过控制该第一控制信号、该第二控制信号、该第三控制信号以及该第四控制信号,用以导通该第四晶体管且不导通该第一晶体管、该第二晶体管以及该第三晶体管。此时电流从该端点gnd依序地流向该第二晶体管、该马达线圈以及该第四晶体管,使得电流于两下侧开关回流,因此不会产生逆流至该端点vcc。当该相位信号发生变化时,该相位延迟机制会持续一时间,其中该时间为一预定值。也就是说,该第二驱动模式也会持续该时间。该马达控制器可通过该计数单元以计算该时间,其中该相位信号可用以重置该计数单元。当该相位信号发生变化时,该计数单元会开始计数并产生一计数值,使得该计数值相关于该时间。接着该计数单元产生该输出信号至该控制单元,用以通知该控制单元结束该相位延迟机制。为了降低该线圈电流的逆流风险,至少可有2种以上的实施例如下:
8.一、该时间为一固定值。该马达控制器可利用该相位延迟机制使得该线圈电流释放完后再启动一换相机制。
9.二、该时间相关于一前一相位的持续时间。当该前一相位的持续时间越大时,该时间会越大。举例来说,该时间可和该前一相位的持续时间成一比例关系。该马达控制器可利用该相位延迟机制使得该线圈电流释放完后再启动一换相机制。
10.当该线圈电流减少至0时,该马达控制器会结束该相位延迟机制并进入一第三驱动模式,用以启动一换相机制。于该第三驱动模式下,该控制单元通过控制该第一控制信号、该第二控制信号、该第三控制信号以及该第四控制信号,用以导通该第二晶体管与该第三晶体管且不导通该第一晶体管与该第四晶体管。此时电流从该端点vcc依序地流向该第三晶体管、该马达线圈以及该第二晶体管,用以将能量传送给该马达。该马达控制器可依序通过该第一驱动模式、该第二驱动模式以及该第三驱动模式,用以启动该马达且降低该线圈电流的逆流风险。
附图说明
11.图1为现有的马达控制器的示意图。
12.图2为图1于一第一驱动模式下线圈电流的方向的示意图。
13.图3为图1的相关信号的时序图。
14.图4为图1于一第二驱动模式下线圈电流的方向的示意图。
15.图5为本发明一实施例的马达控制器的示意图。
16.图6为图5于一第一驱动模式下线圈电流的方向的示意图。
17.图7为本发明一实施例的时序图。
18.图8为图5于一第二驱动模式下线圈电流的方向的示意图。
19.图9为图5于一第三驱动模式下线圈电流的方向的示意图。
20.附图标记说明:10-马达控制器;100-开关电路;101,102,103,104-晶体管;110-控制单元;120-霍尔传感器;vh霍尔信号;20-马达控制器;200-开关电路;201-第一晶体管;202-第二晶体管;203-第三晶体管;204-第四晶体管;l-马达线圈;il-线圈电流;210-控制单元;220-相位侦测单元;230-计数单元;o1-第一端点;o2-第二端点;c1-第一控制信号;c2-第二控制信号;c3-第三控制信号;c4-第四控制信号;vph-相位信号;vo-输出信号;vcc-端点;gnd-端点;t-时间。
具体实施方式
21.下文中的说明将使本发明的目的、特征、与优点更明显。兹将参考图式详细说明依据本发明的较佳实施例。
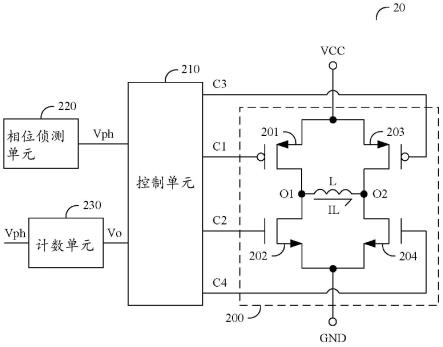
22.图5为本发明一实施例的马达控制器20的示意图。马达控制器20用以驱动一马达,其中马达具有一马达线圈l。马达线圈l具有一第一端点o1与一第二端点o2。马达控制器20具有一开关电路200、一控制单元210、一相位侦测单元220以及一计数单元230。开关电路200具有一第一晶体管201、一第二晶体管202、一第三晶体管203以及一第四晶体管204,用以供应一线圈电流il至马达线圈l。第一晶体管201耦合至一端点vcc与第一端点o1而第二晶体管202耦合至第一端点o1与一端点gnd。第三晶体管203耦合至端点vcc与第二端点o2而第四晶体管204耦合至第二端点o2与端点gnd。第一晶体管201、第二晶体管202、第三晶体管203以及第四晶体管204可为一p型金氧半晶体管或一n型金氧半晶体管。如图5所示,第一晶体管201与第三晶体管203以两p型金氧半晶体管为例。第二晶体管202与第四晶体管204以两n型金氧半晶体管为例。此外,开关电路200为一h桥式(h-bridge)电路。第一晶体管201与第三晶体管203分别为一上侧开关而第二晶体管202与第四晶体管204分别为一下侧开关。
23.控制单元210产生一第一控制信号c1、一第二控制信号c2、一第三控制信号c3以及一第四控制信号c4,用以分别控制第一晶体管201、第二晶体管202、第三晶体管203以及第四晶体管204的导通情形。相位侦测单元220产生一相位信号vph至控制单元210,用以通知控制单元210切换相位。相位侦测单元220可为一霍尔传感器或一反电动势侦测电路。计数单元230接收相位信号vph以产生一输出信号vo至控制单元210。
24.图6为图5于一第一驱动模式下线圈电流il的方向的示意图。于第一驱动模式下,控制单元210通过控制第一控制信号c1、第二控制信号c2、第三控制信号c3以及第四控制信号c4,用以导通第一晶体管201与第四晶体管204且不导通第二晶体管202与第三晶体管203。此时电流从端点vcc依序地流向第一晶体管201、马达线圈l以及第四晶体管204,用以将能量传送给马达。图7为本发明一实施例的时序图。于第一驱动模式下,第一端点o1的电
压为一高位准而第二端点o2的电压为一低位准。
25.当马达控制器20处于一启动状态时,马达控制器20必须提供足以抵抗静摩擦力的能量以启动马达。如图7所示,当相位信号vph从低位准变化成高位准时,此时线圈电流il大于0,亦即表示马达线圈l仍有残余电流。因此,本发明一实施例利用一相位延迟机制,用以降低线圈电流il的逆流风险。图8为图5于一第二驱动模式下线圈电流il的方向的示意图。当相位信号vph发生变化时,马达控制器20会启动相位延迟机制并进入第二驱动模式。于第二驱动模式下,控制单元210通过控制第一控制信号c1、第二控制信号c2、第三控制信号c3以及第四控制信号c4,用以导通第四晶体管204且不导通第一晶体管201、第二晶体管202以及第三晶体管203。此时电流从端点gnd依序地流向第二晶体管202、马达线圈l以及第四晶体管204,使得电流于两下侧开关回流,因此不会产生逆流至端点vcc。于第二驱动模式下,第一端点o1的电压为低位准且第二端点o2的电压为低位准。如图7所示,当相位信号vph发生变化时,相位延迟机制会持续一时间t,其中时间t为一预定值。也就是说,第二驱动模式也会持续时间t。马达控制器20可通过计数单元230以计算时间t,其中相位信号vph可用以重置计数单元230。当相位信号vph发生变化时,计数单元230会开始计数并产生一计数值,使得计数值相关于时间t。接着计数单元230产生输出信号vo至控制单元210,用以通知控制单元210结束相位延迟机制。为了降低线圈电流il的逆流风险,至少可有2种以上的实施例如下:
26.一、时间t为一固定值。马达控制器20可利用相位延迟机制使得线圈电流il释放完后再启动一换相机制。
27.二、时间t相关于一前一相位的持续时间。当前一相位的持续时间越大时,时间t会越大。举例来说,时间t可和前一相位的持续时间成一比例关系。马达控制器20可利用相位延迟机制使得线圈电流il释放完后再启动一换相机制。
28.当线圈电流il减少至0时,马达控制器20会结束相位延迟机制并进入一第三驱动模式,用以启动一换相机制。图9为图5于第三驱动模式下线圈电流il的方向的示意图。于第三驱动模式下,控制单元210通过控制第一控制信号c1、第二控制信号c2、第三控制信号c3以及第四控制信号c4,用以导通第二晶体管202与第三晶体管203且不导通第一晶体管201与第四晶体管204。此时电流从端点vcc依序地流向第三晶体管203、马达线圈l以及第二晶体管202,用以将能量传送给马达。于第三驱动模式下,第一端点o1的电压为低位准而第二端点o2的电压为高位准。
29.马达控制器20可依序通过第一驱动模式、第二驱动模式以及第三驱动模式,用以启动马达且降低线圈电流il的逆流风险。当马达控制器20处于第一驱动模式时,第一端点o1的电压为一高位准而第二端点o2的电压为一低位准,此时线圈电流il大于0。当相位信号vph从一第一位准改变成一第二位准时,马达控制器20会进入第二驱动模式,使得第一端点o1的电压从高位准改变成低位准而第二端点o2的电压维持为低位准,此时线圈电流il仍然大于0。当马达控制器20处于第二驱动模式时,马达控制器20会启动一相位延迟机制,使得线圈电流il于两下侧开关回流,因此不会产生逆流至端点vcc。此外,相位信号vph可用以重置计数单元230。当相位信号vph从第一位准改变成第二位准时,计数单元230会开始计数并产生一计数值,使得计数值相关于一时间t。相位延迟机制与第二驱动模式皆持续时间t,其中时间t为一预定值。当线圈电流il减少至0时,马达控制器20会结束相位延迟机制并进入
一第三驱动模式,用以启动一换相机制。当马达控制器20处于第三驱动模式时,第一端点o1的电压为低位准而第二端点o2的电压从低位准改变成高位准,此时线圈电流il小于0。马达控制器20可依序利用第一驱动模式、第二驱动模式以及第三驱动模式,用以降低线圈电流il的逆流风险并使马达处于一正常操作状态。
30.根据本发明的一实施例,马达控制器20可于一启动状态或一正常操作状态利用相位延迟机制。马达控制器20可利用相位延迟机制使得线圈电流il释放完后再启动一换相机制。马达控制器20可利用相位延迟机制有效地降低线圈电流il的逆流风险。
31.虽然本发明业已通过较佳实施例作为例示加以说明,应了解者为:本发明不限于此被揭露的实施例。相反地,本发明意欲涵盖对于熟习此项技艺的人士而言明显的各种修改与相似配置。因此,申请专利范围应根据最广的诠释,以包含所有此类修改与相似配置。
32.以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。