技术特征:
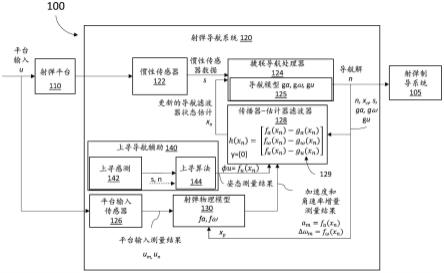
1.一种用于旋转射弹的导航系统(100),所述系统包括:捷联导航处理器(124);传播器-估计器滤波器(128),其中所述捷联导航处理器(124)被配置成输入惯性传感器数据以及输入来自所述传播器-估计器滤波器(128)的导航校正以生成导航解,所述导航解至少包括射弹速度估计和射弹姿态估计;上寻导航辅助(140),所述上寻导航辅助被配置成生成角姿态测量结果,所述角姿态测量结果指示所述旋转射弹相对于地球的滚转角;以及旋转射弹物理模型(130),所述旋转射弹物理模型被配置成利用刚性主体的动力学方程执行计算,其中所述旋转射弹物理模型(130)输入1)来自所述导航解的一个或多个射弹状态估计和2)指示作用在射弹平台上的力的一个或多个平台输入,并且所述旋转射弹物理模型(130)基于所述输入而至少输出三个正交预测平移加速度测量结果的集合;其中所述传播器-估计器滤波器(128)包括与所述物理模型和所述上寻导航辅助(140)相关联的测量方程并且被配置成根据所述导航解、所述预测平移加速度测量结果的集合和指示滚转角的角姿态测量结果来计算所述导航校正。2.一种用于旋转射弹的模型基惯性导航的方法实施方案,所述方法包括:输入来自惯性传感器(122)的惯性传感器数据以及输入来自传播器-估计器滤波器(128)的导航校正以生成导航解,所述导航解至少包括射弹速度估计和姿态估计;执行旋转射弹物理模型(130),所述旋转射弹物理模型被配置成利用刚性主体的动力学方程执行计算,其中所述旋转射弹物理模型(130)输入1)来自所述导航解的一个或多个射弹状态估计和2)指示作用在所述射弹平台上的力的一个或多个平台输入测量结果;用所述旋转射弹物理模型(130)根据所述一个或多个射弹状态估计和所述平台输入测量结果来计算三个正交预测平移加速度测量结果的集合;执行上寻导航辅助(140)以生成角姿态测量结果,所述角姿态测量结果指示所述旋转射弹相对于地球的滚转角;以及根据所述导航解来计算所述导航校正,并且进一步将来自所述旋转射弹物理模型(130)的所述预测平移加速度测量结果的集合和来自所述上寻导航辅助(140)的所述角姿态测量结果用作导航辅助源,其中所述传播器-估计器滤波器(128)包括与所述物理模型和所述上寻导航辅助(140)相关联的测量方程。3.根据权利要求1所述的系统或者根据权利要求2所述的方法,其中所述测量方程由所述传播器-估计器滤波器(128)根据旋转射弹物理模型(130)导出的加速度与惯性传感器导出的加速度之间的差异、上寻导航辅助(140)导出的姿态测量结果与捷联导航系统(100)导出的姿态测量结果之间的差异、以及所述传播器-估计器滤波器(128)的导航滤波器状态来计算。
技术总结
本发明提供了用于旋转射弹的模型基惯性导航。在一个实施方案中,一种导航系统包括:捷联导航处理器;传播器-估计器滤波器,该处理器输入惯性传感器数据和来自滤波器的导航校正以生成导航解,该导航解包括射弹速度和姿态估计;上寻导航辅助,该上寻导航辅助生成指示滚转角的角姿态测量结果;以及物理模型,该物理模型利用刚性主体的动力学方程执行计算,模型输入1)来自导航解的射弹状态估计和2)指示作用在射弹平台上的力的平台输入,并且基于输入而输出三个正交预测平移加速度测量结果的集合;滤波器包括与物理模型和上寻导航辅助相关联的测量方程并且根据导航解、预测平移加速度测量结果和姿态测量结果来计算导航校正。测量结果和姿态测量结果来计算导航校正。测量结果和姿态测量结果来计算导航校正。
技术研发人员:S
受保护的技术使用者:霍尼韦尔国际公司
技术研发日:2022.02.18
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。