用于旋转射弹的模型基惯性导航的系统和方法
背景技术:
1.旋转射弹导航系统通常包括轨迹模型生成器,所述轨迹模型生成器建立旋转射弹在启动时将遵循的轨迹。例如,通常执行预测模型以在发射之后就确定位置以及哪个方向是向上的(相对于地球),然后当旋转射弹到达其峰值高度时,获得基于卫星的位置更新以解决位置中的任何累积误差。虽然一些旋转射弹导航系统已经尝试对来自惯性测量单元(imu)的测量结果进行积分以帮助跟踪位置并将射弹保持在其校正轨迹上,但是使用imu以用于在旋转射弹中导航引入了若干挑战。
2.因为旋转射弹可以具有大约数千转每分钟的旋转速率,即使对于具有小比例因子误差的imu陀螺仪,陀螺仪在射弹旋转轴线上测量角旋转的那些误差将会快速增长且无界限。此外,与其它非旋转飞行器诸如飞机不同,旋转射弹的陀螺仪测量结果可能会受到上弦效应的影响。也就是说,飞行器诸如飞机在沿其轨迹行进时,它将向左倾斜和向右倾斜,使得在某种程度上,飞行器自身的运动会导致飞行器滚转的惯性误差自行抵消。但是,旋转射弹始终在同一方向上旋转,使得在旋转轴线上角测量结果中的误差继续累积。
3.无界的角速率测量结果误差的后果是数倍的。首先,imu的惯性传感器相对于射弹的主体框架测量角速率和比力。然而,相对于地球的导航框架执行导航。需要准确的射弹姿态测量结果以将主体框架参考测量结果准确地映射到地球的导航框架。此外,在现代导航系统中,导航滤波器对来自陀螺仪的数据和加速度测量结果进行迭代积分以产生导航解,所述导航解包括射弹位置、速度、加速度和姿态中的一个或多个。惯性测量结果被馈送回到导航滤波器的处理算法中,使得如果在旋转方向上存在巨大且无界的陀螺仪比例误差,那么将表现为导航解的每个参数中的误差。
4.出于上述原因以及对于本领域技术人员在阅读和理解说明书后将变得显而易见的下述其它原因,本领域需要用于旋转射弹的模型基惯性导航的系统和方法。
技术实现要素:
5.本公开的实施方案提供了用于旋转射弹的模型基惯性导航的方法和系统,并且将通过阅读和研究以下说明书来理解。
6.在一个实施方案中,一种用于旋转射弹的导航系统包括:捷联导航处理器;传播器-估计器滤波器,其中所述捷联导航处理器被配置成输入惯性传感器数据以及输入来自所述传播器-估计器滤波器的导航校正以生成导航解,所述导航解至少包括射弹速度估计和射弹姿态估计;上寻导航辅助,所述上寻导航辅助被配置成生成角姿态测量结果,所述角姿态测量结果指示所述旋转射弹相对于地球的滚转角;以及旋转射弹物理模型,所述旋转射弹物理模型被配置成利用刚性主体的动力学方程执行计算,其中所述旋转射弹物理模型输入1)来自所述导航解的一个或多个射弹状态估计和2)指示作用在射弹平台上的力的一个或多个平台输入,并且所述旋转射弹物理模型基于所述输入而至少输出三个正交预测平移加速度测量结果的集合;其中所述传播器-估计器滤波器包括与所述物理模型和所述上寻导航辅助相关联的测量方程并且被配置成根据所述导航解、所述预测平移加速度测量结
果的集合和指示滚转角的角姿态测量结果来计算所述导航校正。
附图说明
7.当考虑到优选实施方案的描述和以下附图时,本公开的实施方案可以更容易理解,并且其进一步的优点和用途更加显而易见,在附图中:
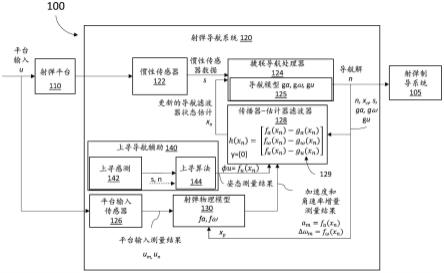
8.图1是制导旋转射弹的框图,所述制导旋转射弹包括本公开的一个实施方案的制导射弹导航系统120;
9.图2是流程图,其在200处示出了用于旋转射弹的模型基惯性导航的示例方法实施方案;以及
10.图3是示出另选制导射弹导航系统实施方案的框图。
11.根据惯例,所描述的各种特征部未必按比例绘制,而是用于强调与本公开相关的特征部。参考字符在所有图和文本中表示类似的元件。
具体实施方式
12.在以下详细描述中,参考形成其一部分的附图,并且在附图中通过可以实践这些实施方案的具体说明性实施方案的方式来示出。对这些实施方案进行了足够详细的描述,以使本领域技术人员能够实践这些实施方案,并且应当理解,在不脱离本公开的范围的情况下,可以利用其他实施方案,并且可以作出逻辑改变、机械改变和电气改变。因此,以下详细描述不应被视为具有限制意义。
13.通过提供模型基射弹导航系统和方法,本公开的实施方案解决了用于旋转射弹的惯性导航的需要。将来自两个不同辅助源的测量结果一起用于计算对捷联导航处理器的导航校正,所述导航校正界定由正捷联导航处理器计算的导航解的速度和姿态分量中的误差。也就是说,即使给定射弹的连续旋转和惯性传感器测量此旋转的比例因子误差,在来自捷联导航处理器的导航解中的误差至少相对于速度和姿态是有界的。如下面更详细地论述的,第一辅助源是旋转射弹物理模型,所述旋转射弹物理模型是利用刚性主体的动力学方程的空气动力学和推进模型。在此上下文中,旋转射弹物理模型表示驱动对应于射弹动力学的运动方程的基础物理。旋转射弹物理模型提供了指示作用在射弹主体上的力的平台输入测量结果、射弹状态以及所得线性和角加速度之间的关系。第二辅助源是上寻导航辅助,所述上寻导航辅助被配置成生成角测量结果,所述角测量结果指示将射弹的主体框架的滚转角与地球关联的朝上方向。将来自该导航辅助的测量结果与来自旋转射弹物理模型的测量结果结合使用,以进一步限制积分为导航位置的姿态误差和速度误差,因此界定了在馈送到射弹制导系统的导航解中的速度误差和位置误差。这最终导致射弹更准确地遵循其期望的轨迹。
14.图1是制导旋转射弹100的框图,所述制导旋转射弹包括本公开的一个实施方案的制导射弹导航系统120。在图1中,射弹平台110表示制导旋转射弹100的结构元件(例如,类似于机身、翼和控制表面),其中平台输入u和射弹状态x
p
表示产生作用在射弹平台110上的力和力矩的变量,所述力和力矩可能影响制导旋转射弹100的线性和旋转加速度。因此,平台输入u包括喷射或火箭发动机推进或相关参数,诸如节气门设定或和发动机rpm,这些参数会导致平台产生的推进力直接或间接从射弹发动机产生。例如,平台产生的推进力可以
包括由喷射或火箭发动机产生的推力(部分地由节气门确定)。附加平台输入u包括产生作用在旋转射弹100上的气动力的控制表面偏转(诸如副翼、升降舵或方向舵偏转)。平台输入u还包括外部变量,诸如风速,所述风速影响作用在制导旋转射弹100上的气动力。
15.射弹状态x
p
(包括速度和姿态)在旋转射弹物理模型130中的动力学方程中使用,并且从导航解n、导航滤波器状态xn和惯性传感器数据s导出。连同风速,射弹状态x
p
可用于确定相对风速、迎角、侧滑角和倾斜角。这些参数产生影响射弹100的线性和旋转加速度的气动力和力矩(诸如升力和阻力)。惯性传感器122用于感测和测量由平台输入u和射弹状态x
p
引起的制导旋转射弹100的结构元件的净加速度(线性和旋转加速度两者)。例如,惯性传感器122可以包括加速度计和陀螺仪的集合。在一些实施方案中,惯性传感器122可以使用低级惯性传感器(即,非导航级传感器,如战术级和工业级传感器)、此类微机电系统(mems)加速度计和mems陀螺仪或其它工业或战术级惯性传感器来实施。
16.来自惯性传感器122的输出是原始惯性传感器数据s,该数据在一些实施方案中包括由施加到射弹平台110的线性加速力产生的三个正交比力测量结果以及由施加到射弹平台110的旋转力矩产生的三个正交角速率测量结果。在一些实施方案中,惯性传感器122可以被实施为惯性测量单元(imu),所述惯性测量单元包括陀螺仪和加速度计的集合,该集合产生三个正交比力测量结果和三个正交角速率测量结果。
17.捷联导航处理器124输入惯性传感器数据s,以产生导航解n,该导航解至少包括射弹姿态和速度估计。当惯性传感器122低于导航级时,导航解n(如果不进行校正)将在射弹姿态和速度估计中累积无界的误差。此外,在恒定旋转射弹100的上下文中,来自惯性传感器数据的旋转轴线的角测量结果的误差将增加对导航解位置和速度估计的准确性具有直接负面影响的无界。
18.然而,在本公开的实施方案的情况下,将导航校正(其可以以更新的导航滤波器状态估计的形式)提供给捷联导航处理器124,使得潜在射弹姿态和速度误差是有界的。捷联导航处理器124根据更新的导航滤波器状态估计调整由惯性传感器122产生的原始惯性传感器数据s,从而产生可以比从单独原始惯性传感器数据s的导出的导航解更准确的导航解n。此外,导航解的速度和/或姿态分量中相对于真实速度和姿态射弹状态的潜在误差被界定为使得射弹制导系统105可以基于准确到在已知公差内的导航解输入来操作以控制和导航制导旋转射弹100目标。
19.在本公开的一些实施方案中,两个不同辅助源以更新的导航滤波器状态估计的形式用于导航校正,其被提供给捷联导航处理器124。这些辅助源是来自射弹物理模式的加速度测量结果和来自上寻导航辅助的姿态测量结果。
20.如图1所示,制导射弹导航系统120进一步包括平台输入传感器126、利用对应于射弹平台110的刚性主体的动力学方程执行计算的旋转射弹物理模型130、上寻导航辅助140和传播器-估计器滤波器128。应当理解,制导射弹导航系统120可以包括用代码编程的一个或多个处理器和存储器,该代码在执行时实施旋转射弹物理模型130、上寻导航辅助140、传播器-估计器滤波器128或捷联导航处理器124中的任一个的功能。
21.可以基于由旋转射弹物理模型130实施的射弹平台110的物理模型来估计对应于惯性传感器122应感测的预测加速力的预测加速力。对于本公开中呈现的一个或多个实施方案,旋转射弹物理模型130根据传播器-估计器滤波器128的导航滤波器状态xn计算线性
加速度和任选地角速率增量(由函数fa和f
ω
给出)的集合,并且那些线性加速度和角速率增量(fa和f
ω
)被馈送到传播器-估计器滤波器128作为辅助源。
22.在图1所示的实施方案中,平台输入传感器126向旋转射弹物理模型130输出可从测量的输入(um)获得的平台输入的指示、被估计为导航滤波器状态(un)的平台输入或两者。例如,发动机推力可以是测量的输入,但风速可以是作为导航滤波器状态中的一者的估计输入。旋转射弹物理模型130应用测量的和/或估计的平台输入以计算线性加速度测量结果am,该测量结果包括作为辅助源输入提供给传播器-估计器滤波器128的三个正交预测平移加速度测量结果的集合。在一些实施方案中,线性加速度测量结果am可以表示为:
23.am=fa(x
p
,u)=fa(f(n,xn,s),〖[u〗m,un])
[0024]
其中am是由旋转射弹物理模型130给出的线性加速度,并且由函数fa定义,其取决于平台状态x
p
和平台输入u。应当理解,线性加速度测量结果am可以采取包括三个测量值的向量的形式,一个值用于射弹平台的三个正交线性轴线(即,x轴、y轴和z轴)中的每个正交线性轴线,该三个正交线性轴线定义三个正交预测平移加速度测量结果的集合。此函数fa由作用在平台上的力和平台的质量表征。刚性主体平台运动方程包括线性加速度的方程。如以上表达所示,对平台状态的依赖性可以用对导航滤波器状态的依赖性替换。平台状态x
p
可以表示为:
[0025]
x
p
=f(n,xn,s)
[0026]
平台状态x
p
至少包括射弹速度状态,并且可以包括用于从刚性主体运动方程导出的模型的姿态、角速率和位置的附加射弹状态。平台状态x
p
可以从导航解n、导航滤波器状态xn和惯性传感器数据s计算。由旋转射弹物理模型130利用的导航滤波器状态xn对应于由传播器-估计器滤波器128计算的导航滤波器状态xn。导航滤波器状态xn可以包括导航和传感器误差,并且还可以用平台输入un和/或其它辅助状态来增强(例如,)。在一些实施方案中,导航滤波器状态xn可以由旋转射弹物理模型130从捷联导航处理器124的输出获得或导出。
[0027]
在一些实施方案中,旋转射弹物理模型130任选地可以进一步计算包括三个正交角速率增量测量结果δωm的加速度测量结果,该增量测量结果可以通过以下表达式表示为函数f
ω
:
[0028]
δωm=f
ω
(x
p
,u,δt)=f
ω
(f(n,xn,s),[um,un],δt)
[0029]
其取决于平台状态x
p
、平台输入u和指定时间步δt。此函数由作用在平台上的力矩和平台的惯性矩或惯性张量表征。应理解,角速率增量测量结果δωm可以采取向量的形式,该向量包括三个测量值、一个值用于围绕射弹平台的三个正交线性轴线中的每个正交线性轴线(即,围绕x轴旋转,围绕y轴旋转和围绕z轴旋转)的力矩。刚性主体平台运动方程包括用于计算角加速度的方程,可以对角加速度进行积分以提供角速率增量方程。在一些实施方案中,可以用对导航滤波器状态的依赖性替换对平台状态的依赖性,如表达式中所示。
[0030]
估计旋转射弹中的滚转角的过程被称为“上寻”,并且在图1中,此功能由上寻导航辅助140执行。如图1所示,上寻导航辅助140包括耦合到上寻算法144的上寻感测功能142。上寻导航辅助140用作第二导航辅助,用于利用上寻算法144产生导航校正,从而基于由上寻感测功能142感测或估计的参数而计算姿态测量结果。由地球重力引起的加速度总是在
地球中心的方向上,使得当导出射弹的姿态的准确估计时,可以确定与射弹的主体框架相关的向量。此重力加速度向量可以与用于由惯性传感器122感测的测量加速度的向量相加,进行一次积分以获得射弹速度并且再次积分以获得位置。本文呈现的实施方案使用来自射弹物理模型130和上寻导航辅助140的输出的组合来估计射弹速度和姿态,以约束不确定性并向捷联导航处理器124提供连续导航校正以产生除速度之外相对于姿态误差有界的导航解。
[0031]
上寻导航辅助140可以不同方式实施。例如,旋转射弹100上的部件可以产生使部件根据射弹的旋转速率而固有地变化的输出。也就是说,射弹的旋转可以引起对可以检测、分析和利用的信号的调制。机载惯性传感器是一个此类部件的示例。在一些实施方案中,上寻感测功能142可以包括或以其它方式耦合到此类部件,并且被配置成感测和测量对应于旋转轴线角旋转速率的至少一个参数。然后可以通过上寻算法144(诸如通过积分过程)处理角速率测量结果以产生由传播器-估计器滤波器128使用的滚转角估计。可以用于实施上寻导航辅助140的上寻系统的非限制性示例包括标题为“navigation system for spinning projectiles”的美国专利6,163,021,以及“apparatus and appertaining method for upfinding in spinning projectiles using a phase-lock-loop or correlator mechanism”的美国专利7,395,987,它们各自以引用方式全文并入本文。在一些实施方案中,上寻算法144可以任选地使用混合或混杂方法来产生滚转角估计。例如,上寻算法144可以进一步从来自惯性传感器数据的导航解n和/或角旋转速率信息输入姿态估计,并且计算那些输入与来自上寻感测功能142的测量结果之间的加权平均值,以计算传至传播器-估计器滤波器128的姿态测量结果中包含的滚转角。
[0032]
在一些实施方案中,传播器-估计器滤波器128可以包括卡尔曼滤波器或其变体(诸如扩展卡尔曼滤波器(ekf)或无迹卡尔曼滤波器(ukf))或其它传播器-估计器滤波器,诸如粒子滤波器(例如,顺序蒙特卡罗(smc)滤波器)。
[0033]
在射弹导航系统的上下文中,传播器-估计器滤波器算法是用于滤波和混合来自导航传感器的数据和具有不同准确度的导航辅助的滤波器算法,以便建立射弹的导航状态的最佳估计。滤波器算法实施递归滤波器,该滤波器从一系列不完整、嘈杂或相对不精确的测量结果中估计动力学系统的一个或多个状态变量。也就是说,传播器-估计器滤波器128预测未来一组射弹状态的值应基于其当前值,同时考虑由于噪声或设备容限而在该数据中通常预期的任何误差。传播器-估计器滤波器128基于该预测产生误差状态估计,并将这些状态与其接收的下一组测量数据进行比较。测量的数据与基于更新的误差状态的预测之间的任何差异表示被称为残留误差的偏差。如果残留误差较小,则传播器-估计器滤波器128将尝试通过将残留误差(或其至少一些部分)应用到导航滤波器状态的预测值的下一个迭代中来校正误差。
[0034]
在一些实施方案中,传播器-估计器滤波器128可以包括卡尔曼滤波器或其变体(诸如扩展卡尔曼滤波器(ekf)或无迹卡尔曼滤波器(ukf))或其它传播器-估计器滤波器,诸如粒子滤波器(例如,顺序蒙特卡罗(smc)滤波器)。
[0035]
对于本公开的实施方案,传播器-估计器滤波器128包括与旋转射弹物理模型130和上寻导航辅助140两者相关联的测量方程(诸如129处所示),使得当传播器-估计器滤波器128输出对捷联导航处理器124的导航校正时,那些导航校正将界定导航解中的速度和姿
态误差。换句话说,传播器-估计器滤波器128根据导航解来计算导航校正,其进一步利用来自旋转射弹物理模型130的预测平移加速度测量结果和来自上寻导航辅助140的姿态测量结果的集合作为导航辅助。测量方程可以由变量y表示,如下所示:
[0036]
y=h(xn,n,s,um,δt)=h(xn)
[0037]
其是导航滤波器状态xn的函数,如函数h所描述的,其计算旋转射弹物理模型130导出的线性和角加速度与惯性传感器122导出的线性和角加速度之间的差异、以及上寻导航辅助140导出的姿态测量结果与惯性传感器122导出的姿态测量结果之间的差异。如果测量方程中的所有其他变量被认为是固定的,则h可以写为仅xn的函数。如果导航滤波器状态xn在传播器-估计器滤波器128内是校正的,则与射弹的相应线性加速度和旋转加速轴线中的每个相应线性加速度和旋转加速轴线相关联的旋转射弹物理模型130导出的加速度与惯性传感器122导出的加速度之间的差异理想地应当是零。类似地,如果导航滤波器状态xn在传播器-估计器滤波器128内是校正的,则上寻导航辅助140导出的姿态测量结果与惯性传感器122导出的姿态测量结果之间的差异理想地应当是零。因此,测量方程y的值设置为零。当函数h不产生y=0时,传播器-估计器滤波器128导出误差残差,该误差残差形成在每次滤波迭代之后馈送到捷联导航处理器124的导航校正的基础,以产生导航解,该导航解驱动传播器-估计器滤波器128中的测量方程y的值朝向零。
[0038]
在一些实施方案中,通过将导航模型125结合到捷联导航处理器124中来进一步改进导航解中的界定误差。导航模型125包括根据惯性传感器数据s计算线性加速度和角加速度的算法。例如,在一些实施方案中,惯性传感器122可以包括低于导航级传感器单元(诸如mems传感器),该传感器单元包括三个加速度计和三个陀螺仪的集合。例如,在一些实施方案中,惯性传感器数据包括来自用于估计线性加速度的mems加速度计的一个或多个比力测量结果。在此类实施方案中,导航模型125可以根据惯性传感器数据s计算三个正交线性加速度值和三个正交角加速度值的相应集合。在一些实施方案中,为了更好地促进从传播器-估计器应用导航校正,导航模型125在计算导航解n时执行结合导航滤波器状态xn的算法。更具体地,如由传播器-估计器滤波器128计算的由捷联导航处理器124接收的导航校正包括更新的导航滤波器状态估计。例如,由导航模型125计算的线性加速度an可以表示为:
[0039]an
=ga(n,xn,s)
[0040]
其中an由函数ga定义,其取决于导航解n、更新的导航滤波器状态xn、由传播器-估计器滤波器128提供的估计和来自惯性传感器122的惯性传感器数据s。应当理解,线性加速度测量结果an可以采取向量的形式,该向量包括多达三个测量值,一个值用于射弹平台的三个正交线性轴线(即x轴、y轴和z轴)中的每个正交线性轴线。此函数ga由测量的比力、加速度计误差估计以及姿态与重力耦合的影响表征。
[0041]
类似地,在一些实施方案中,由导航模型125计算的角速率增量δωn可以表示为:
[0042]
δωn=g
ω
(n,xn,s,δt)
[0043]
其中δωn是导航模型给出的角速率的变化,并由函数g
ω
定义,其取决于导航解n、更新的导航滤波器状态xn、由传播器-估计器滤波器128提供的估计、来自惯性传感器122的惯性传感器数据s、以及指定的时间步δt。应理解,角加速度测量结果δωn可以采取向量的形式,该向量包括三个测量值,一个值用于围绕射弹平台的三个正交线性轴线中的每个正交线性轴线(即,围绕x轴旋转、围绕y轴旋转和围绕z轴旋转)的力矩。此函数g
ω
由测量的
角速率和陀螺仪误差估计表征。导航模型125可以根据惯性传感器数据s计算角速率,角速率可以在指定时间进行差分以计算角速率的变化。
[0044]
在一些实施方案中,由导航模型125计算的姿态测量结果φn可以表示为:
[0045]
φn=gu(n,xn)
[0046]
其中φn由函数gu定义,其取决于导航解n、和更新的导航滤波器状态xn、由传播器-估计器滤波器128提供的估计。此函数gu由角速率向姿态的积分表征,其受惯性传感器误差和导航误差的影响。
[0047]
将所得ga、g
ω
和gu值馈送回到传播器-估计器滤波器128中,测量方程y可以更具体地表示为:
[0048][0049]
其中φu是由上寻算法144计算的姿态测量结果(例如,相对于竖向的射弹滚转角),并且φn是由捷联导航处理器124计算的此相同量。该测量方程通过以下而形成:将旋转射弹物理模型130和导航模型125针对线性加速度和角速率变化的计算结果进行差分,以及将上寻算法144和导航模型125针对姿态的计算结果进行差分。如上文所解释的,测量方程在y=[0]的条件下计算,因为如果导航滤波器状态估计xn是校正的,则各自的差异应当是零。
[0050]
图2是流程图,其在200处示出了用于旋转射弹的模型基惯性导航的示例方法实施方案。应当理解,本文相对于图2所示的方法200描述的特征和元件可与本文相对于图1或其它图所论述的任何其它实施方案的元件结合使用,结合或取代,反之亦然。此外,应当理解,本文描述的实施方案的元件的功能、结构和其它描述可以应用于与其描述的任何附图和/或实施方案相似或类似地命名或描述的元件。
[0051]
方法开始于210,其中输入来自惯性传感器的惯性传感器数据以及输入来自传播器-估计器滤波器的导航校正以生成导航解,所述导航解至少包括射弹速度估计和姿态估计。在一些实施方案中,导航解的姿态估计至少包括射弹主体框架的射弹滚转角(例如,相对于射弹旋转的轴线的角位置)。
[0052]
在220处,该方法包括执行旋转射弹物理模型,所述旋转射弹物理模型被配置成利用刚性主体的动力学方程执行计算,其中所述旋转射弹物理模型输入1)来自所述导航解的射弹状态估计和2)指示作用在所述射弹平台上的力的平台输入测量结果。如上所述,平台输入测量结果可以包括传感器数据或指示作用在射弹平台上的力的导出的输入估计。射弹状态估计可以对应于由传播器-估计器滤波器计算的导航状态估计。在230处,该方法包括用所述旋转射弹物理模型根据所述射弹状态估计和所述平台输入测量结果来计算三个正交预测平移加速度测量结果的集合。在一些实施方案中,所述方法进一步包括用所述旋转射弹物理模型来计算三个角速率测量结果,所述三个角速率测量结果用于围绕射弹平台的三个正交线性轴线中的每个正交线性轴线的力矩。
[0053]
在240处,该方法继续执行上寻导航辅助以生成角姿态测量结果,所述角姿态测量结果指示所述旋转射弹相对于地球的滚转角。如上所述,由地球重力引起的加速度始终在
地球中心的方向上,其中“向上”是远离地球中心的相反方向。来自上寻导航辅助的滚转角测量结果对应于将地球重力加速度与射弹的主体框架相关的向量。
[0054]
在250处,该方法包括根据所述导航解来计算所述导航校正,并且进一步将来自所述旋转射弹物理模型的所述预测平移加速度测量结果的集合和来自所述上寻导航辅助的所述角姿态测量结果用作导航辅助源,其中所述传播器-估计器滤波器包括与所述物理模型和所述上寻导航辅助相关联的测量方程。
[0055]
通过将包括与旋转射弹物理模型所利用的导航状态相对应的导航状态的测量方程结合到传播器-估计器滤波器中,传播器-估计器滤波器计算对捷联导航处理器的导航校正,该导航校正将在导航解中界定速度和姿态误差。
[0056]
图3是在300处示出用于射弹100的本公开的一个实施方案的另选制导射弹导航系统320的框图。应当理解,除了另有说明之外,本文相对于图1的制导射弹导航系统320描述的特征和元件应用于图3的制导射弹导航系统320。此外,应当理解,本文描述的实施方案的元件的功能、结构和其它描述可以应用于与其描述的任何附图和/或实施方案相似或类似地命名或描述的元件。
[0057]
如图3所示,在另选制导射弹导航系统320中,由上寻导航辅助140产生的姿态测量结果用于增强旋转射弹物理模型130的准确性,而不是用作传播器-估计器滤波器128的直接辅助源。因为旋转射弹物理模型130具有对姿态不确定性的一些灵敏度,因此提供具有来自上寻导航辅助140的姿态测量结果的旋转射弹物理模型130将增加其加速度和角速率增量测量结果输出到传播器-估计器滤波器128的准确性。如上所述,在一些实施方案中,来自上寻导航辅助140的输出可以是使用导航解n、数据和/或惯性传感器数据s的加权或混合解。在此情况下,传播器-估计器滤波器128的测量方程y可以更具体地表示为:
[0058][0059]
其中fa(xn)和f
ω
(xn)输入到传播器-估计器滤波器128受益于由于将来自上寻导航辅助140的姿态测量结果结合到旋转射弹物理模型130中而引起的不确定性。
[0060]
示例性实施方案
[0061]
实施例1包括一种用于旋转射弹的导航系统,所述系统包括:捷联导航处理器;传播器-估计器滤波器,其中所述捷联导航处理器被配置成输入惯性传感器数据以及输入来自所述传播器-估计器滤波器的导航校正以生成导航解,所述导航解至少包括射弹速度估计和射弹姿态估计;上寻导航辅助,所述上寻导航辅助被配置成生成角姿态测量结果,所述角姿态测量结果指示所述旋转射弹相对于地球的滚转角;以及旋转射弹物理模型,所述旋转射弹物理模型被配置成利用刚性主体的动力学方程执行计算,其中所述旋转射弹物理模型输入1)来自所述导航解的一个或多个射弹状态估计和2)指示作用在射弹平台上的力的一个或多个平台输入,并且所述旋转射弹物理模型基于所述输入而至少输出三个正交预测平移加速度测量结果的集合;其中所述传播器-估计器滤波器包括与所述物理模型和所述上寻导航辅助相关联的测量方程并且被配置成根据所述导航解、所述预测平移加速度测量结果的集合和指示滚转角的角姿态测量结果来计算所述导航校正。
[0062]
实施例2包括根据实施例1所述的系统,所述系统进一步包括一个或多个平台输入传感器,其中所述一个或多个平台输入中的至少一个平台输入由所述一个或多个平台输入
传感器生成。
[0063]
实施例3包括根据实施例1至2中任一个所述的系统,其中所述惯性传感器数据包括来自一个或多个角速率测量结果的一个或多个比力测量结果,所述一个或多个角速率测量结果来自一个或多个惯性传感器。
[0064]
实施例4包括根据实施例1至3中任一个所述的系统,其中所述传播器-估计器滤波器包括卡尔曼滤波器、扩展卡尔曼滤波器、无迹卡尔曼滤波器或粒子滤波器。
[0065]
实施例5包括根据实施例1至4中任一个所述的系统,其中所述测量方程由所述传播器-估计器滤波器根据旋转射弹物理模型导出的加速度与惯性传感器导出的加速度之间的差异、上寻导航辅助导出的姿态测量结果与捷联导航系统导出的姿态测量结果之间的差异、以及所述传播器-估计器滤波器的导航滤波器状态来计算。
[0066]
实施例6包括根据实施例1至5中任一个所述的系统,其中所述旋转射弹物理模型被配置成计算对应于所述射弹平台的刚性主体的动力学方程。
[0067]
实施例7包括根据实施例1至6中任一个所述的系统,其中所述旋转射弹物理模型根据所述传播器-估计器滤波器的导航滤波器状态来计算所述预测平移加速度测量结果的集合。
[0068]
实施例8包括根据实施例1至7中任一个所述的系统,其中所述旋转射弹物理模型计算由作用在所述旋转射弹上的力引起的预测平移加速度测量结果。
[0069]
实施例9包括根据实施例1中任一个所述的系统,其中所述上寻导航辅助包括上寻算法,所述上寻算法被配置成基于由上寻感测功能感测或估计的参数来计算姿态测量结果。
[0070]
实施例10包括根据实施例9所述的系统,其中所述上寻感测功能通过分析具有根据所述旋转射弹的旋转速率而变化的分量的信号来确定旋转速率。
[0071]
实施例11包括根据实施例9至10中任一个所述的系统,其中所述上寻算法处理来自所述上寻感测功能的角速率测量结果,以产生提供给所述传播器-估计器滤波器的所述滚转角估计。
[0072]
实施例12包括根据实施例1至11中任一个所述的系统,其中所述捷联导航处理器包括导航模型,所述导航模型被配置成由所述惯性传感器数据和来自所述传播器-估计器滤波器的更新的导航滤波器状态估计来计算线性加速度和角速率增量。
[0073]
实施例13包括一种用于旋转射弹的模型基惯性导航的方法实施方案,所述方法包括:输入来自惯性传感器的惯性传感器数据以及输入来自传播器-估计器滤波器的导航校正以生成导航解,所述导航解至少包括射弹速度估计和姿态估计;执行旋转射弹物理模型,所述旋转射弹物理模型被配置成利用刚性主体的动力学方程执行计算,其中所述旋转射弹物理模型输入1)来自所述导航解的一个或多个射弹状态估计和2)指示作用在所述射弹平台上的力的一个或多个平台输入测量结果;用所述旋转射弹物理模型根据所述一个或多个射弹状态估计和所述平台输入测量结果来计算三个正交预测平移加速度测量结果的集合;执行上寻导航辅助以生成角姿态测量结果,所述角姿态测量结果指示所述旋转射弹相对于地球的滚转角;以及根据所述导航解来计算所述导航校正,并且进一步将来自所述旋转射弹物理模型的所述预测平移加速度测量结果的集合和来自所述上寻导航辅助的所述角姿态测量结果用作导航辅助源,其中所述传播器-估计器滤波器包括与所述物理模型和所述
上寻导航辅助相关联的测量方程。
[0074]
实施例14包括根据实施例13所述的方法,其中所述惯性传感器数据包括来自一个或多个角速率测量结果的一个或多个比力测量结果,所述一个或多个角速率测量结果来自一个或多个惯性传感器。
[0075]
实施例15包括根据实施例13至14中任一个所述的方法,其中所述测量方程由所述传播器-估计器滤波器根据旋转射弹物理模型导出的加速度与惯性传感器导出的加速度之间的差异、上寻导航辅助导出的姿态测量结果与捷联导航系统导出的姿态测量结果之间的差异、以及所述传播器-估计器滤波器的导航滤波器状态来计算。
[0076]
实施例16包括根据实施例13至15中任一个所述的方法,其中所述旋转射弹物理模型被配置成计算对应于所述射弹平台的刚性主体的动力学方程。
[0077]
实施例17包括根据实施例13至16中任一个所述的方法,其中所述上寻导航辅助包括上寻算法,所述上寻算法被配置成基于由上寻感测功能感测或估计的参数来计算姿态测量结果。
[0078]
实施例18包括根据实施例17所述的方法,其中所述上寻感测功能通过分析具有根据所述旋转射弹的旋转速率而变化的分量的信号来确定旋转速率。
[0079]
实施例19包括根据实施例17至18中任一个所述的方法,其中所述上寻算法处理来自所述上寻感测功能的角速率测量结果,以产生提供给所述传播器-估计器滤波器的所述滚转角估计。
[0080]
实施例20包括根据实施例13至19中任一个所述的方法,其中所述导航解由捷联导航处理器来计算,所述捷联导航处理器包括导航模型,所述导航模型被配置成由所述惯性传感器数据和来自所述传播器-估计器滤波器的更新的导航滤波器状态估计来计算线性加速度和角速率增量。
[0081]
在各种另选实施方案中,在整个本公开中描述的系统和/或装置元件、方法步骤或示例实施方式(诸如平台输入传感器、惯性传感器、旋转射弹物理模型、上寻导航辅助、上寻感测功能、上寻算法、传播器-估计器滤波器、捷联导航处理器、导航模型、射弹制导系统或任何控制器、处理器、电路或其子部分中的任一个)可至少部分地使用一个或多个计算机系统、现场可编程门阵列(fpga)或类似装置来实施,所述类似装置包括耦合到存储器并执行代码以实现那些元件、过程或示例的处理器,所述代码存储在非暂态硬件数据存储装置上。因此,本公开的其他实施方案可以包括包含驻留在计算机可读介质上的程序指令的元件,当由此类计算机系统实现时,这些程序指令使得元件能够实现本文所述实施方案。如本文所用,术语“计算机可读介质”是指具有非暂态物理形式的有形存储器存储装置。此类非暂态物理形式可以包括计算机存储器装置,诸如但不限于穿孔卡、磁盘或磁带、任何光学数据存储系统、闪存只读存储器(rom)、非易失性rom、可编程rom(prom)、可擦除可编程rom(e-prom)、随机存取存储器(ram)或任何其他形式的永久、半永久或临时存储器存储系统或具有物理、有形形式的装置。程序指令包括但不限于由计算机系统处理器执行的计算机可执行指令和硬件描述语言诸如超高速集成电路(vhsic)硬件描述语言(vhdl)。
[0082]
如本文所用,术语诸如“平台输入传感器”、“惯性传感器”、“旋转射弹物理模型”、“传播器-估计器滤波器”、“捷联导航处理器”、“导航模型”、“射弹制导系统”、“上寻导航辅助”是指航空电子工业领域的技术人员所理解的元件名称,并且在本文中不用作调用
35usc112(f)的现时单词或现时术语。
[0083]
尽管本文已说明和描述了特定实施方案,但本领域的普通技术人员将认识到,经计算以实现相同目的的任何布置可替代所展示的特定实施方案。本技术旨在覆盖所提出的实施方案的任何修改或变型。因此,显而易见的是,实施方案仅受权利要求书及其等同物所限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。