2),柔轮形变后的双半圆的偏心量r1=π(r
7-r6)/(π-2);
15.4)计算出双半圆波发生器组件的双半圆半径r8=r
5-h1;双半圆波发生器组件的双半圆偏心量r2=r1;
16.5)计算出双半圆凸轮的双半圆半径r9=r
8-h2;双半圆凸轮的双半圆偏心量 r3=r2;即可得出双半圆发生器组件的规格尺寸;
17.6)确定刚轮内齿数量z1=z2 2;
18.7)计算柔轮的运动规律,波发生器顺时针转动角ω时,柔轮逆时针转动角ω1=ω(z
1-z2)/z2=2ω/z2;
19.8)以刚轮轮齿齿顶圆弧形为基准,按照柔轮的运动规律以及柔轮外齿的齿型设计刚轮包络线齿型,计算出柔轮齿顶区域齿形在刚轮齿根区域的一次包络轨迹,以及计算出柔轮齿根区域齿形在刚轮齿顶区域的二次包络轨迹,共同组成刚轮完整的齿形,形成与柔轮的锥形外齿相配合锥形内齿。
20.进一步地,在步骤(3)中柔轮外齿长度l1=1.2w1。
21.本发明的有益效果为:
22.本设计中通过将柔轮的外齿设置为锥型齿,并且横截面呈半圆形结构,刚轮的内齿与柔轮外齿配合,也为锥型结构,该设置可提高与刚轮的啮合度,并且横截面为半圆形结构的设置还可以提高外齿与内齿相对活动时的顺滑度,不会出现卡齿现象,由于锥型齿的设计,本设计可采用垫片的方式调整柔轮的左右位置,以提高柔轮与刚轮的配合度,使得柔轮与刚轮的加工精度要求无需太高,也可以达到高精度啮合的效果,实现零背隙啮合传动,因此,本方案的传动精度比以往的谐波减速机的传动精度高,适用于对传动精度要求较高的机械工程。
附图说明
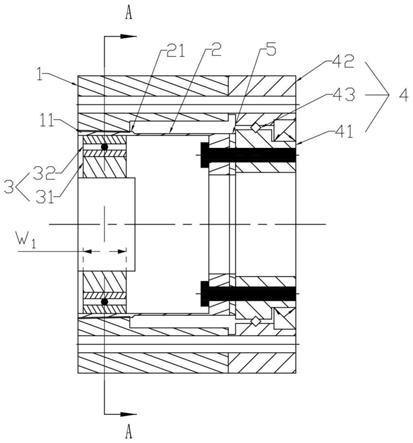
23.图1是本发明半剖结构的整体结构图;
24.图2是图1中a-a的剖视图;
25.图3是图2中双半圆波发生器组件与柔轮的结构图;
26.图4是图3中b-b柔轮外齿的剖视图
27.图5是图2中双半圆波发生器组件的结构图;
28.图6是图2中双半圆凸轮的结构图;
29.图7是本发明柔轮外齿分布圆分布轨迹的示意图;
30.图8是本发明柔轮撑起后外齿分布圆分布轨迹的示意图;
31.图9是图1中柔轮的结构图。
具体实施方式
32.以下结合附图对本发明进行进一步说明:
33.如图1-9所示,一种零背隙谐波减速器,包括刚轮1、安装在刚轮1内的柔轮2以及设置在柔轮2内的双半圆波发生器组件3;所述柔轮2的左端具有外齿 21;所述刚轮1具有与外齿21配合的内齿11;所述外齿21的横截面为半圆弧形;所述外齿21从左往右半径逐渐减小,形成锥型外齿21,最左端外齿21圆半径为r
42
,最右端外齿21圆半径为r
41
;所述双半圆波发
生器组件3包括双半圆凸轮31和安装在双半圆凸轮31与柔轮2之间的柔性轴承32;本设计中通过将柔轮2的外齿21设置为锥型齿,并且横截面呈半圆形结构,刚轮1的内齿11 与柔轮2外齿21配合,也为锥型结构,在柔轮2通过波发生器组件的作用下发生形变过程中,柔轮2的左端是绕着右端位置摆动的,柔轮2的左端形变量较大,因此外齿21左端的半径设置为大端,右端设置为小端,在长轴位置处,该设置可提高与刚轮1的啮合度,而在短轴与短轴周边位置处,也可以使得外齿 21完全与内齿11脱离,并且横截面为半圆形结构的设置还可以提高外齿21与内齿11相对活动时的顺滑度,不会出现卡齿现象,因此,本方案的传动精度比以往的谐波减速机的传动精度高,适用于对传动精度要求较高的机械工程。
34.所述柔轮2与刚轮1的右端通过交叉滚子轴承4连接;所述交叉滚子轴承4 包括滚子轴承内圈41、滚子轴承外圈42和滚柱43;所述滚子轴承内圈41固定在柔轮2左端;所述滚子轴承外圈42固定在刚轮1左端;所述滚柱43交叉排列安装在滚子轴承内圈41与滚子轴承外圈42之间;所述滚子轴承内圈41与柔轮2之间还设有垫片5,本设计通过垫片5调整柔轮2相对刚轮1的左右位置,从而可以提高柔轮2与刚轮1的配合度,使得柔轮2与刚轮1的加工精度要求无需太高,也可以达到高精度啮合的效果。
35.所述刚轮1的内齿11数量比柔轮2的外齿21数量多两个,使传动比达到最大。
36.所述外齿21的锥角a为1
°‑3°
,根据多次试验,得出设置为2
°
较优。
37.所述柔轮2外齿21的长度为柔性轴承32宽度的1-1.5倍。
38.一种用于计算锥齿谐波减速器的尺寸及齿型计算方法,包括以下步骤:
39.1)先确定好柔轮2变形后半长轴长度r7;柔轮2的壁厚h1;柔性轴承32 的内外半径差h2;柔性轴承32的宽度w1;柔轮2齿数z2=n;柔轮2外齿21 分布圆处的模数为m;柔轮2外齿21最左端的外齿21圆半径r
42
,柔轮2外齿 21最右端的外齿21圆半径r
41
;
40.2)根据公式计算柔轮2原始状态下的外齿21分布圆半径r6=z2*m/2,柔轮 2外齿21分布圆处的齿距p=mπ,柔轮2外齿21的长度l1=1.2w1,即可得出柔轮2的规格尺寸;其中柔轮2外齿21的锥角a=arctan((r
41-r
42
)/l1),而锥角a 设置为2
°
较为优选,因此在步骤(1)中确定柔轮2外齿21最左端的外齿21 圆半径r
42
与柔轮2外齿21最左端的外齿21圆半径r
41
时,尽量将锥度调整为接近2
°
,以达到最优方案。
41.3)由公式2πr5 4r1=2πr6,以及r1 r5=r7进行计算,可得出柔轮2形变后外齿21在双半圆上的分布圆半径r5=(πr
6-2r7)/(π-2),柔轮2形变后的双半圆的偏心量r1=π(r
7-r6)/(π-2);
42.4)计算出双半圆波发生器组件3的双半圆半径r8=r
5-h1;双半圆波发生器组件3的双半圆偏心量r2=r1;
43.5)计算出双半圆凸轮31的双半圆半径r9=r
8-h2;双半圆凸轮31的双半圆偏心量r3=r2;即可得出双半圆发生器组件的规格尺寸;
44.6)确定刚轮1内齿11数量z1=z2 2;
45.7)计算柔轮2的运动规律,波发生器顺时针转动角ω时,柔轮2逆时针转动角ω1=ω(z
1-z2)/z2=2ω/z2;
46.8)以刚轮1轮齿齿顶圆弧形为基准,按照柔轮2的运动规律以及柔轮2外齿21的齿型设计刚轮1包络线齿型,计算出柔轮2齿顶区域齿形在刚轮1齿根区域的一次包络轨迹,以及计算出柔轮2齿根区域齿形在刚轮1齿顶区域的二次包络轨迹,共同组成刚轮1完整的齿
形,形成与柔轮2的锥形外齿21相配合锥形内齿11。
47.以上所述并非对本新型的技术范围作任何限制,凡依据本发明技术实质对以上的实施例所作的任何修改、等同变化与修饰,均仍属于本新型的技术方案的范围内。
技术特征:
1.一种零背隙谐波减速器,包括刚轮、安装在刚轮内的柔轮以及设置在柔轮内的双半圆波发生器组件;所述柔轮的左端具有外齿;所述刚轮具有与外齿配合的内齿;其特征在于:所述外齿的横截面为半圆弧形;所述外齿从左往右半径逐渐减小,形成锥型外齿,最左端外齿圆半径为r
42
,最右端外齿圆半径为r
41
;所述双半圆波发生器组件包括双半圆凸轮和安装在双半圆凸轮与柔轮之间的柔性轴承。2.根据权利要求1所述的一种零背隙谐波减速器,其特征在于:所述柔轮与刚轮的右端通过交叉滚子轴承连接;所述交叉滚子轴承包括滚子轴承内圈、滚子轴承外圈和滚柱;所述滚子轴承内圈固定在柔轮左端;所述滚子轴承外圈固定在刚轮左端;所述滚柱交叉排列安装在滚子轴承内圈与滚子轴承外圈之间;所述滚子轴承内圈与柔轮之间还设有垫片。3.根据权利要求1所述的一种零背隙谐波减速器,其特征在于:所述刚轮的内齿数量比柔轮的外齿数量多两个。4.根据权利要求1所述的一种零背隙谐波减速器,其特征在于:所述外齿的锥角a为大于0
°
小于3
°
。5.根据权利要求1所述的一种零背隙谐波减速器,其特征在于:所述柔轮外齿的长度为柔性轴承宽度的1-1.5倍。6.一种用于计算如权利要求1-5任意一项所述的锥齿谐波减速器的尺寸及齿型计算方法,其特征在于:1)先确定好柔轮变形后半长轴长度r7;柔轮的壁厚h1;柔性轴承的内外半径差h2;柔性轴承的宽度w1;柔轮齿数z2=n;柔轮外齿分布圆处的模数为m;柔轮外齿最左端的外齿圆半径r
42
,柔轮外齿最右端的外齿圆半径r
41
;2)根据公式计算柔轮原始状态下的外齿分布圆半径r6=z2*m/2,柔轮外齿分布圆处的齿距p=mπ,柔轮外齿的长度l1=1-1.5倍w1,即可得出柔轮的规格尺寸;3)通过公式计算柔轮形变后外齿在双半圆上的分布圆半径r5=(πr
6-2r7)/(π-2),柔轮形变后的双半圆的偏心量r1=π(r
7-r6)/(π-2);4)计算出双半圆波发生器组件的双半圆半径r8=r
5-h1;双半圆波发生器组件的双半圆偏心量r2=r1;5)计算出双半圆凸轮的双半圆半径r9=r
8-h2;双半圆凸轮的双半圆偏心量r3=r2;即可得出双半圆发生器组件的规格尺寸;6)确定刚轮内齿数量z1=z2 2;7)计算柔轮的运动规律,波发生器顺时针转动角ω时,柔轮逆时针转动角ω1=ω(z
1-z2)/z2=2ω/z28)以刚轮轮齿齿顶圆弧形为基准,按照柔轮的运动规律以及柔轮外齿的齿型设计刚轮包络线齿型,计算出柔轮齿顶区域齿形在刚轮齿根区域的一次包络轨迹,以及计算出柔轮齿根区域齿形在刚轮齿顶区域的二次包络轨迹,共同组成刚轮完整的齿形,形成与柔轮的锥形外齿相配合锥形内齿。7.根据权利要求6所述的一种零背隙谐波减速器的尺寸及齿型计算方法,其特征在于:在步骤(3)中柔轮外齿长度l1=1.2w1。
技术总结
本发明提供一种零背隙谐波减速器,包括刚轮、安装在刚轮内的柔轮以及设置在柔轮内的双半圆波发生器组件;所述柔轮的左端具有外齿;所述刚轮具有与外齿配合的内齿;所述外齿的横截面为半圆弧形;所述外齿从左往右半径逐渐减小,形成锥型外齿,最左端外齿圆半径为R
技术研发人员:李宗翰
受保护的技术使用者:东莞市卓蓝自动化设备有限公司
技术研发日:2022.06.29
技术公布日:2022/9/6
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
