一种5g机器人
技术领域
1.本发明涉及机器人领域,特别是一种5g机器人。
背景技术:
2.在日常生活中,随着工业水平的不断提高,机械人得到了越来越多场合的应用;特别是对一些特殊环境进行探测时,需要探测机械人。现有探测机械人一般通过5g信号传输信息,实现对机器人的控制以及传输探测信息。
3.但是现有的探测机器人对行走路面的适应性差,对于一些不够平整的路面无法保证稳定性,影响探测。
技术实现要素:
4.本发明的目的是提供一种5g机器人,能够适应不平整的路面。
5.本发明的目的通过以下技术方案来实现:
6.一种5g机器人,包括左右两侧对称延伸有安装部的主板,和固定在主板下端的传动箱,安装部用于安装探测模块用于对装置所在环境进行探测,以及安装在传动箱左右两侧的侧轮,以及下端固定有中轴的安装架,中轴前后方向贯穿主板,且与主板转动连接,安装架的前后两端均连接有辅轮机构使所述机器人保持平稳,安装架上安装有电源和信号模块。
7.所述侧轮外沿包裹有中空内腔的软胶体。
8.所述传动箱两侧的轴头处均固定有传动叉ⅰ,两个侧轮的中心处均固定有安装轴,两个安装轴内侧端头处均固定有传动叉ⅱ,同侧的传动叉ⅰ和传动叉ⅱ通过十字轴转动连接,两个安装部的外端均固定有安装块,安装块上安装有用于控制安装轴升降转动的控制机构。
9.所述控制机构包括滑动在安装轴上的滑块,滑块上转动有升降架,升降架与安装块滑动连接,且升降架与安装块之间安装有第一伸缩杆。
10.所述辅轮机构包括固定在安装架上的叉架,叉架上转动有辅助轴,辅助轴上转动有辅助架,辅助架的下端转动有辅助轮,叉架的一侧固定有齿环,辅助架上固定有与齿环传动的第二电机。
附图说明
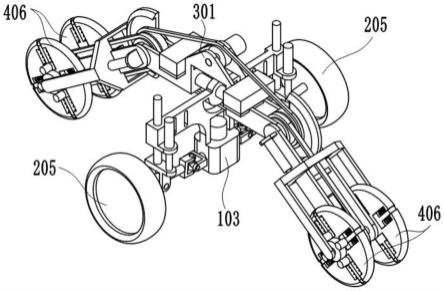
11.图1是机器人整体结构示意图一;
12.图2是机器人整体结构示意图二;
13.图3是机器人局部结构示意图一;
14.图4是机器人局部结构示意图二;
15.图5是主板的结构示意图;
16.图6是侧轮的结构示意图;
17.图7是安装架的结构示意图;
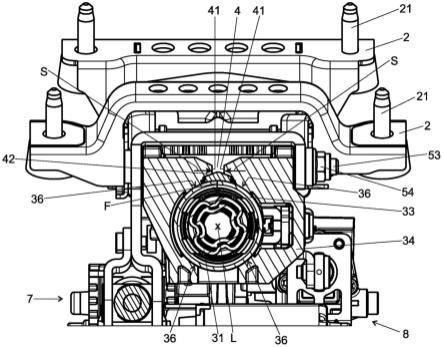
18.图8是机器人局部结构示意图三;
19.图9是辅助架的结构示意图;
20.图10是辅助轮的结构示意图;
21.图11是机器人局部结构示意图四;
22.图12是限位块的结构示意图;
23.图13是控制架的结构示意图。
24.图中:
25.主板101;安装部102;传动箱103;传动叉ⅰ104;安装块105;
26.十字轴201;传动叉ⅱ202;升降架203;安装轴204;侧轮205;滑块206;
27.安装架301;中轴302;叉架303;齿环304;电源305;信号模块306;
28.辅助架401;辅助轴402;传动轮403;第二电机404;辅轮轴405;辅轮406;凹槽407;
29.限位块501;拨板502;小弹簧503;控制架504;控制轮505。
具体实施方式
30.如图1-7所示:
31.一种5g机器人,包括主板101、安装部102、传动箱103、侧轮205、安装架301、中轴302、电源305和信号模块306;所述主板101的左右两侧对称延伸有安装部102,用于对装置所在环境进行探测探测模块安装在安装部102处,传动箱103固定在主板101的下端,两个侧轮205分别安装在传动箱103左右两侧,安装架301的下端固定有中轴302,中轴302前后方向贯穿转动连接在主板101上,电源305和信号模块306均安装在安装架301上,安装架301的前后两端均连接有辅轮机构使所述机器人保持平稳。
32.在使用时,机器人通过位于左右两侧的两个侧轮205,和位于前后两侧的辅轮机构,保持平稳的位于地面,通过控制端向信号模块306发送5g信号,使信号模块306对安装在传动箱103上的第一电机进行控制,从而通过第一电机对传动箱103进行传动,继而带动两个侧轮205同时同向转动,使机器人向前后向后移动;并在移动过程中通过探测模块对机器人周围的环境进行探测,并将探测结果通过信号模块306返回,从而形成机器人的远程探测;
33.而由于中轴302与主板101的转动连接,在两个侧轮205所行走的路径水平高度不同时,能够通过中轴302与主板101的转动,进行自我调节,即两个辅轮机构受自身重力随着中轴302向位于低水平的侧轮205方向偏移,从而使机器人能够适应不平整的路面,并保持较好的稳定状态进行探测;
34.其中电源305为蓄电池等能够用于为机器人提供电力能源的部件,安装部102上设有长孔,用于适应不同的探测模块安装。
35.进一步的:
36.所述侧轮205外沿包裹有中空内腔的软胶体。
37.通过软胶体的设置,增加了侧轮205的抓地能力,同时通过其中空内腔,使软胶体易于变形,进一步增加了侧轮205的抓地能力。
38.如图4-6所示:
39.两个分别固定在所述传动箱103两侧的输出轴端头上,两个安装轴204分别固定安装在两个侧轮205的中心处,两个传动叉ⅱ202分别固定在两个安装轴204的内侧端头处,同侧的传动叉ⅰ104和传动叉ⅱ202通过十字轴201转动连接,两个安装块105分别固定在两个安装部102的外端,用于控制安装轴204升降转动的控制机构连接在安装块105上。
40.所述控制机构包括升降架203和滑块206滑块206滑动在安装轴204上,升降架203的下端转动在滑块206上,升降架203的上端贯穿滑动在安装块105上,第一伸缩杆安装在升降架203与安装块105之间。
41.通过第一伸缩杆的伸缩,带动升降架203升降,升降架203通过滑块206带动安装轴204以十字轴201为轴向上或向下转动,从而形成对侧轮205水平位置的调节,且不影响传动箱103对侧轮205的传动,从而增强机器人适应路面环境的能力;
42.且能够通过信号模块306对两侧的两个第一伸缩杆进行分别控制,从而形成对两个侧轮205水平位置的分别调节,进一步增强机器人适应路面环境的能力;
43.其中第一伸缩杆为电动伸缩杆。
44.如图7-9所示:
45.所述辅轮机构包括叉架303、齿环304、辅助架401、辅助轴402和第二电机404,辅助轴402转动在叉架303上,辅助架401的上端转动在辅助轴402上,辅助轮转动在辅助架401的下端,齿环304固定在叉架303的一侧,第二电机404固定安装在辅助架401内且与齿环304传动连接,所述辅轮机构设有两个,两个叉架303分别固定在安装架301的前后两侧。
46.使两个辅助轮位于主板101的前后两侧对机器人进行辅助支撑,在需要调节辅助轮水平高度时,通过信号模块306控制第二电机传动齿环304,使第二电机输出轴上的齿轮带动辅助架401以辅助轴402为轴进行转动,从而带动辅助轮进行升降转动,达到调节辅助轮水平高度的目的;
47.而且,可以根据周围环境,分别对两个第二电机进行控制,形成对两个辅助轮水平高度的分别调节,进一步增强机器人适应路面环境的能力。
48.如图10所示:
49.所述辅助轮包括辅轮轴405和辅轮406,辅轮轴405转动在辅助架401上,两个辅轮406分别固定在辅轮轴405的两端;
50.通过并排两个辅轮406的设置,进一步增强装置的稳定性。
51.如图7-10所示:
52.还包括传动轮403和第三电机;传动轮403转动在辅助轴402上,传动轮403与同侧的辅轮轴405传动连接,第三电机安装在安装架301上用于通过链或带同时传动两个传动轮403,位于下端带贯穿主板101上的弧形孔,从而不影响中轴302与主板101转动。
53.由于每个辅助架401上的传动轮403与辅轮轴405的间距不变,两个传动轮403的间距不变,从而通过第三电机对两个传动轮403进行传动,再通过两个传动轮403分别同时对两个辅轮轴405进行传动,能够对任意水平高度的四个辅轮406进行传动,从而使四个辅轮406具有驱动机器人进行移动的动力;
54.特别是针对路径上具有障碍需要越过时,可以向将位于前方的辅助轮抬起,此时机器人通过两个侧轮205和位于后方的辅助轮进行支撑前进,在前方的辅助轮与障碍物接触后,通过控制位于前方的辅助架401向下转动,使两个侧轮205与地面脱离,继而通过两个
转动的辅助轮使机器人继续前进,直至两个侧轮205越过障碍,再将位于后侧的辅助轮抬起,使机器人越过障碍;
55.从而使机器进一步的增强适应不同路面环境的能力。
56.进一步的:
57.所述辅轮406的外边沿设有防滑橡胶。
58.通过防滑橡胶进一步增强辅轮406与地面的摩擦力,提高辅轮406带动机器人移动的能力。
59.进一步的:
60.所述辅轮406上均匀设有多个凹槽407。
61.通过多个凹槽407的设置,增强辅轮406与地面的摩擦力,提高辅轮406带动机器人移动的能力。
62.如图10-13所示:
63.还包括限位块501、拨板502、小弹簧503、控制架504和控制轮505;限位块501滑动在凹槽407内,拨板502固定在限位块501上,小弹簧503设置在凹槽407与限位块501之间,使拨板502缩入凹槽407内,控制架504滑动在辅助架401上,两个控制轮505分别转动在控制架504下端的两侧,多个限位块501将控制轮505顶紧在辅轮406的中心处。
64.当障碍物较高,需要位于前方的辅轮406攀爬时,为了增加辅轮406的抓地能力,通过信号模块306控制安装在辅助架401上的第二电动伸缩杆伸长,从而使控制轮505沿辅助架401方向向前移动,继而在辅轮406带动限位块501转动时,每个限位块501转动至辅助架401延伸方向处时,受控制轮505格挡影响,而使限位块501带动拨板502滑出凹槽407,继而使拨板502与障碍物接触,随着辅轮406的转动,而使辅轮406在障碍物上攀爬,且由于位于后方的辅轮406同样在地面转动,从而能够保证机器人不后退,即使机器人在攀爬过程中进行间隙性向前移动攀爬,进一步的增强越障的能力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。