1.本发明涉及医疗器械,更具体地说,涉及一种重力牵引物理治疗装置,特别是一种基于人体体重分布图的重力牵引物理治疗装置。
背景技术:
2.牵引是一种通过沿其轴线或与其成一定角度形成牵引力来治疗和预防脊柱疾病的方法。重力牵引物理治疗装置是以人体自重做牵引力的装置 ,因为重力是人体本身肌肉可以承受的,而电动或手动带来的牵引力不好控制,有时会超出人体自重,给人体造成伤害。
3.目前常用的重力牵引床只能根据人体的体重和所需的牵引力的大小来粗略估算床面抬起的角度。但是,人有高矮胖瘦,不同体形的人的体重分布不同,相同的抬起角度下,作用到人体相同部分的牵引力大是不同的。然而目前的重力牵引物理治疗装置无法适配不同体现的人来精确地地控制牵引力的大小。
技术实现要素:
4.本发明旨在解决现有的重力牵引床无法根据不同体型的人来灵活调整牵引力的问题。
5.为解决上述技术问题,本发明提出一种基于人体体重分布图的重力牵引物理治疗装置,包括框架、平台、分段称重装置和转动控制装置,其中,所述框架用于支承平台;所述平台能够在所述转动控制装置的控制下,相对于所述框架进行转动;所述分段称重装置用于对患者人体的不同分段进行称重,获得患者人体不同分段的分段重量;所述转动控制装置用于对患者人体的不同分段的重量数据进行处理以获得患者的人体体重分布图,根据该人体体重分布图、牵引力目标作用点在人体中的位置和目标牵引力的大小来计算平台相对于框架旋转的最大旋转角度,并根据该最大旋转角度来控制平台的转动。
6.根据本发明的优选实施方式,所述对患者人体的不同分段的重量数据进行处理以获得患者的人体体重分布图包括:将患者人体的不同分段的重量数据在人体体重分布模板库中进行匹配,获得与患者人体体形匹配的人体体重分布图。
7.根据本发明的优选实施方式,所述人体体重分布模板库存储了不同体形的人体模型的分段重量及相应的体重分布图。
8.根据本发明的优选实施方式,所述将患者人体的不同分段的重量数据在人体体重分布模板库中进行匹配包括:将所述将患者人体的不同分段的重量数据与所述人体体重分布模板库中各体得分布图对应的人体分段重量进行匹配。
9.根据本发明的优选实施方式,所述匹配算法采用最短欧氏距离法进行。
10.根据本发明的优选实施方式,所述人体体重分布模板库根据人体特征存储体重分布图;所述匹配包括将患者的人体特征信息与人体体重分布模板库中的人体特征信息进行匹配。
11.根据本发明的优选实施方式,所述人体特征包括性别、年龄和体形特征。
12.根据本发明的优选实施方式,所述计算平台相对于框架旋转的最大旋转角度的步骤采用如下公开进行:α
max
=arcsin(f
max
/ t
∙m∙
g)其中,α
max 为最大旋转角度,t为作用系数,为0至1之间的常数,m是牵引力目标作用点所作用的人体部分的质量,g为重力加速度,f
max
为最大目标牵引力 。
13.根据本发明的优选实施方式,所述分段称重装置包括多个称重板,各称重板放置于所述平台上,并可以在平台上移动和固定。
14.根据本发明的优选实施方式,所述称重板为五个,其分别对应于头、胸、臀、胫和足。
15.本发明可以根据患者的体型和所需的目标牵引力的大小来精确控制重力牵引物理治疗装置的旋转角度,以保证治疗的安全性和有效性。
附图说明
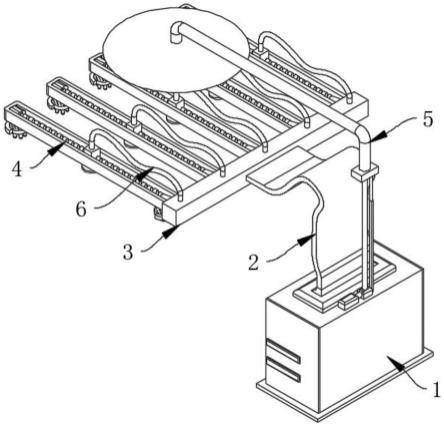
16.图1是本发明一个实施例的基于人体体重分布图的重力牵引物理治疗装置的结构示意图。
17.图2是本发明上述实施例的基于人体体重分布图的重力牵引物理治疗装置的平台在转过角度α后的结构示意图。
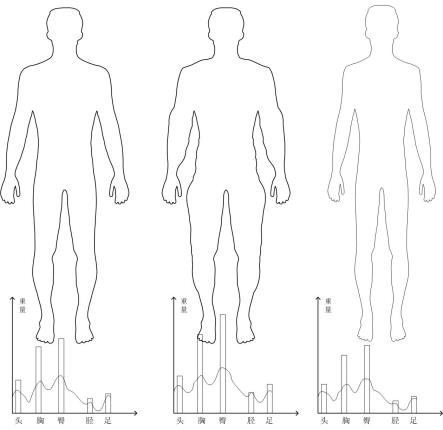
18.图3是本发明的一个实施例的人体体重分布模板的示意图。
19.图4是图3中的一个具体人体模型的人体体重分布图。
20.图5显示了人体体重分布模板图中牵引力目标作用点所作用的人体体重,其大小等于线下面积m。
具体实施方式
21.为解决现有的重力牵引床无法根据不同体型的人来灵活调整牵引力的问题,本发明提出一种基于人体体重分布图的重力牵引物理治疗装置。所谓的人体体重分布图是指从人体的头顶到脚底的各部分的体重分配,即沿着人体的中轴线的体重分配。一般来说,人体的体重主要集中在胸部和臂部,头部、足部相对来说占比较轻。但是,对于不同的患者的人体来说,体重分布却不尽相同,例如,幼儿、儿童的头部重量占比较大,成年人的头部重量占比较小,肥胖人士则通常在腰部、股部堆积大量脂肪,造成中部重量占比高于正常人。因此,有必要根据不同患者的体形来针对性地设计重力牵引床的工作方式,以使得在牵引过程中保持合适的牵引力。
22.具体来说,本发明的重力牵引物理治疗装置包括框架、平台、分段称重装置和转动控制装置。其中,框架支承着平台,平台能够在转动控制装置的控制下相对于所述框架进行转动,分段称重装置则对患者人体的不同分段进行称重,以获得患者人体不同分段的重量。
23.所述转动控制装置对患者人体的不同分段的重量数据进行处理以获得患者的人体体重分布图,根据该人体体重分布图、牵引力目标作用点在人体中的位置和目标牵引力的大小来计算平台相对于框架旋转的最大旋转角度,并根据该最大旋转角度来控制平台的转动。
24.分段称重装置可以由多个称重板来实现,称重板上设有重力检测装置,各称重板放置于所述平台上,并可以在平台上移动和固定。
25.为了使本发明的方案更加清楚,下面结合附图并通过具体的实施例来描述本发明。
26.图1是本发明一个实施例的基于人体体重分布图的重力牵引物理治疗装置的结构示意图,该图中,装置是一个牵引治疗床,患者处于未进行牵引的平躺位置。如图1所示,本发明的重力牵引物理治疗装置包括框架1和平台2。平台2配备有水平轴3,平台2与水平轴其刚性连接,由此,平台通过水平轴3可相对于框架1枢转(参见图2)。
27.进一步来说,该实施例的重力牵引物理治疗装置还包括作为分段称重装置的称重板,称重板具有多个,包括第一称重板51、第二称重板52、第三称重板53、第四称重板54和第五称重板55,各称重板平行放置于平台2上,并可以在平台上移动和固定。此外,在各称重板和平台上还可以安放垫子,垫子可以包括多个,用于与患者身体接触和支撑,并保护患者。在该实施例中,垫子包括平垫41、顶垫42、底垫43和头垫44等。
28.如前所述,在该实施例中,称重板为五个,其分别对应于头、胸、臀、胫和足。各称重板之间存在一定的间隙,以便于其根据不同身高的人进行调整。在平台2处于水平位置且其上没有患者时(可以有垫子),对各称重板进行调零和校准。
29.进一步来说,该实施例的物理治疗装置还包括转动控制装置,转动控制装置包括平台倾斜装置和角度计算装置。平台倾斜装置包含固定在框架1上的电机6,电机6通过齿轮箱与平台2的水平轴3连接以进行驱动。
30.图2是本发明上述实施例的基于人体体重分布图的重力牵引物理治疗装置的平台在转过角度α后的结构示意图。如图2所示,电机6通过齿轮箱带动水平轴转动,从而使得平台2进行转动,使得患者的头部一端被抬高。此时,患者的人体的腋下夹持有固定带8,固定带8连接有固定绳。固定绳9的一端固定于平台的顶部。
31.图2中所示的g点所在位置为目标作用点,例如位于脊柱的某个位置上。由此,当平台一端被抬起时,人体g点以下部分(从g点到足部)的重量作用到g点上产生一个牵引力,该牵引力的大小与角度α正相关(当α小于90度时)。
32.角度计算装置7用于计算平台在不同角度下由患者自身重力产生的作用到g点的牵引力的大小。角度计算装置7固定于框架1上并控制电机6的转动,并根据其计算结果来控制转动控制装置的转动。角度计算装置需具有数据处理功能,可以由微处理器、plc或其他器件构成。
33.在该实施例中,角度计算装置7将患者人体的不同分段的重量数据在人体体重分布模板库中进行匹配,获得与患者人体体形匹配的人体体重分布图。然后根据该人体体重分布图、牵引力目标作用点在人体中的位置和目标牵引力的大小来计算平台相对于框架旋转的最大旋转角度,并根据该最大旋转角度来控制平台的转动。角度计算装置可以包括存储器,以存储人体体重分布模板库,角度计算装置或具有通信功能,例如具有以太网络的接口,以便可具备访问远程人体体重分布模板库的能力。
34.图3是本发明的一个实施例的人体体重分布模板的示意图。如前所述,所述人体体重分布模板库是用于存储不同体形的人体模型的分段重量及相应的体重分布图。例如图3中,模板库中,中等身材、偏胖体型、偏瘦体形的人体模型显示出具有不同的体重分布。当
然,该示例仅示出了典型的几中人体模型的体型,事实上,即使对于同样胖瘦程度的人体而言,其也可能具有不同的体重分布。本发明可以针对各种体型的人体建立体重分布模板。
35.图4是图3中的一个具体人体模型的人体体重分布图。该图4显示了图3中最左侧的中等身材的人体模型的体重分布。如图所示,体重分布模板图包括人体不同分段的重量a和体重分布曲线b。不同分段的体重a在此实施例中分别是人体模型的头、胸、臀、胫、足所对应的分段的重量,这与该实施例的称重板的数量和所对应的人体位置相对应。体重分布曲线b对模板库中的人体模型的体重分布的更精细化分布图,其相当于是人体模型的长度方向(身高方向)的体重线密度图。为了后续匹配方便,可以对分段重量和体重分布曲线进行标准化,即将分段重量和体重分布曲线进行等比例缩放,使模板的人体总重量均为预设的总重量s,s例如对于男性为70kg,对于女性为60kg。在其他实施例中,也可以根据性别、年龄、身高等设定多个值。
36.人体体重分布模板可以存储大量不同体型的人的分段重量和体重分布曲线。这样,当获得了将患者人体的不同分段的重量数据后,就可以将该重量数据在人体体重分布模板库中进行匹配。在匹配时,考虑到模板是经过标准化,因此可以先将患者人体的总重量也进行同样的标准化。然后,再将所述将患者人体的不同分段的重量数据与所述人体体重分布模板库中各体得分布图对应的人体分段重量进行匹配。在匹配时,可以将患者的分段重量看作一个矢量m=[m1,m2,m3,m4,m5],将其依次与模板库中的人体模型的分段重量进行匹配,匹配算法例如可以采用最小欧氏距离算法,既计算出模板库中与矢量m最近的点所对应的人体体重分布模板。当然,本发明不限于此,还可以采用其他的匹配算法。
[0037]
为了更加精确地匹配患者的体型特征,在一种优选的实施方式中,所述人体体重分布模板库可以根据人体特征存储体重分布图。也就是说,所述人体特征包括性别、年龄和体形特征。体型特征例如是总重量、身高、胖瘦类型等。由此,在进行上这样写的匹配算法前,先将患者的人体特征输入角度计算装置7中,角度计算装置7根据输入的人体体征从人体体重分布模板库中筛选出人体体征相匹配的人体体重分布图,然后在筛选出的人体体重分布图中执行上述的匹配算法。这样将有助行提高匹配结果的精准性。
[0038]
在获得了与患者人体匹配的人体体重分布图后,角度计算装置根据该人体体重分布图、牵引力目标作用点在人体中的位置和目标牵引力的大小来计算平台相对于框架旋转的最大旋转角度,并根据该最大旋转角度来控制平台的转动。如图4所示,牵引力目标作用点在人体中的位置g对应在人体体重分布图中的位置为g’。由此可知,g点以下到足底的人体部分的重量为从g点到足底点b的曲线线下面积。图5显示了人体体重分布模板图中牵引力目标作用点所作用的人体体重,其大小等于线下面积m。
[0039]
也就是说,m=,其中g为牵引力目标作用点,b为足底点,m为人体体重分布图中的人体线密度。
[0040]
由此,作用到牵引力目标作用点的目标牵引力大小f按下面的公式计算:f=t
∙m∙g∙
sin(α)其中,t为作用系数,为0至1之间的常数,其取决于牵引力目标作用点占人体当前位置所承载的牵引力大小的比例。由于骨胳通常承载了人体大部分的压力或拉力,其值通常可设为为0.6~0.9之间。m是牵引力目标作用点所作用的人体部分的质量,g为重力加速
度,α为平台旋转角度。由此,当最大目标牵引力f
max
确定之后,可以计算出最大旋转角α
max
=arcsin(f
max
/ t
∙m∙
g)。
[0041]
由此,角度计算装置7可根据该公式来计算最大的旋转角度,并控制平台倾斜装置按照既定的程序旋转到最大旋转角或小于最大旋转角并保持在相应的位置以预定的时间,以对患者进行重力牵引治疗。
[0042]
由上可知,本发明可以根据患者的体型和所需的目标牵引力的大小来精确控制重力牵引物理治疗装置的旋转角度,以保证治疗的安全性和有效性。
[0043]
以上所述的具体实施例,对本发明的目的、技术方案和有益效果进行了进一步详细说明,应理解的是,以上所述仅为本发明的具体实施例而已,并不用于限制本发明,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。