1.本说明书涉及云台技术领域,尤其涉及一种巡检云台。
背景技术:
2.在电力巡检场景中,云台是执行环境观察与监测的直接功能模块,搭配安装在移动平台或升降机构上适应不同场景及观察范围的要求,通过配置搭配调整,满足不同环境下的功能需求。
3.目前市场上类似功能需求的云台,大致分为室内监控云台、室外车载云台、室外监控云台、飞行器云台,通常作为民用商品出售的室内监控云台、室外监控云台一般是固定设置不可调节角度,功能简单且功能性差,室外车载云台、飞行器云台尺寸和重量都较大,且成本较高。
技术实现要素:
4.本说明书提供一种巡检云台,以解决相关技术中的问题。
5.本说明书实施例提供一种巡检云台,包括:
6.底座;
7.回转组件,绕第一方向转动设置于所述底座;
8.俯仰组件,绕第二方向转动设置于所述回转组件,所述第一方向与所述第二方向垂直;
9.拍摄器,设置于所述俯仰组件。
10.可选地,所述回转组件包括第一壳体,与所述底座转动连接;所述巡检云台还包括用于驱动所述回转组件绕所述第一方向转动的第一驱动组件,所述第一驱动组件包括:
11.第一齿轮,部分设于所述第一壳体内,所述第一齿轮位于所述第一壳体外的部分与所述底座固定连接,所述第一齿轮的轴向沿所述第一方向设置;
12.第一电机,设于所述第一壳体内并与所述第一壳体固定连接,所述第一电机包括第一传动齿,所述第一传动齿与所述第一齿轮啮合;
13.所述第一电机转动,带动所述第一传动齿绕所述第一齿轮转动,以带动所述第一壳体绕所述第一方向相对所述底座转动。
14.可选地,所述第一驱动组件还包括:
15.第一轴承,套接于所述第一齿轮位于所述第一壳体内的第一端部;
16.第一安装板,套接于所述第一轴承的外部,所述第一安装板与所述第一壳体固定连接,所述第一电机固定于所述第一安装板。
17.可选地,所述第一齿轮位于所述第一壳体内的第一端部设有第一收容孔,所述第一驱动组件还包括:
18.第一磁铁,设于所述第一收容孔内;
19.与所述第一磁铁同轴设置的第一磁编码器,固定于所述第一壳体。
20.可选地,所述底座靠近所述回转组件的一侧端部开设有收容槽,所述第一壳体靠近所述底座的一侧端部设于所述收容槽内,所述第一壳体的外壁与所述收容槽的内壁之间设有第一轴承组件;
21.所述第一齿轮位于所述第一壳体外的第二端部穿过所述第一轴承组件并于所述收容槽内与所述底座固定连接。
22.可选地,所述回转组件内设有第一光电传感器,所述底座靠近所述回转组件的一侧设有凸起,所述回转组件相对所述底座转动至所述凸起将所述第一光电传感器遮挡的位置为所述回转组件的初始位置。
23.可选地,所述回转组件的相对两侧部均沿同一方向向外延伸形成有侧边部,两个所述侧边部的内壁均设有沿所述第二方向设置的转轴;
24.所述俯仰组件包括第二壳体,所述第二壳体设置于两个所述侧边部之间,所述转轴部分穿设于所述第二壳体并与所述第二壳体转动连接。
25.可选地,所述巡检云台还包括用于驱动所述俯仰组件绕所述第二方向转动的第二驱动组件,所述第二驱动组件包括:
26.第二齿轮,设于所述第二壳体内并与其中一个所述转轴固定连接,所述第二齿轮的轴向沿所述第二方向设置;
27.第二电机,设于所述第二壳体内并与所述第二壳体固定连接,所述第二电机包括第二传动齿,所述第二传动齿与所述第二齿轮啮合;
28.所述第二电机转动,带动所述第二传动齿绕所述第二齿轮转动,以带动所述第二壳体绕所述第二方向相对所述转轴转动。
29.可选地,所述第二驱动组件还包括:
30.第二轴承,套接于所述第二齿轮靠近所述第二电机的第一端部;
31.第二安装板,套接于所述第二轴承的外部,所述第二安装板与所述第二壳体固定连接,所述第二电机固定于所述第二安装板。
32.可选地,所述第二齿轮靠近所述第二电机的第一端部设有第二收容孔,所述第二驱动组件还包括:
33.第二磁铁,设于所述第二收容孔内;
34.与所述第二磁铁同轴设置的第二磁编码器,固定于所述第二壳体。
35.可选地,所述俯仰组件内设有第二光电传感器,所述俯仰组件相对所述回转组件转动至所述第二齿轮将所述第二光电传感器遮挡的位置为所述俯仰组件的初始位置。
36.可选地,所述转轴的外部套设有第二轴承组件,所述第二轴承组件的外部卡接有压盖,所述压盖与所述第二壳体固定。
37.可选地,还包括:
38.补光灯组件,设于所述俯仰组件的前部;和/或
39.红外传感器,设于所述俯仰组件;和/或
40.夜视摄像头,设于所述俯仰组件的前部。
41.本说明书提供的巡检云台,将回转组件、俯仰组件以及拍摄器设计为一体化的整体结构,结构简洁占用体积小。通过回转组件和俯仰组件,能够使拍摄器从两个方向实现运动自由度,分别为水平回转运动自由度和俯仰运动自由度,以达到对周围环境物体做全方
位观察的目的。
42.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本说明书。
附图说明
43.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本说明书的实施例,并与说明书一起用于解释本说明书的原理。
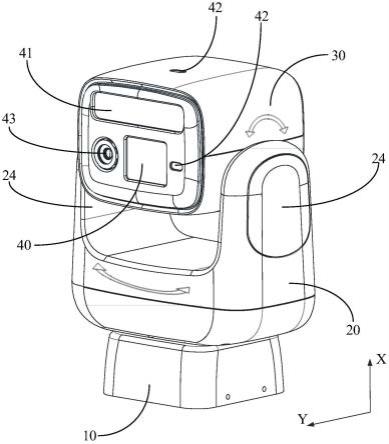
44.图1所示为本说明书一示例性实施例的巡检云台的立体示意图。
45.图2所示为本说明书一示例性实施例的巡检云台的侧剖视图。
46.图3所示为本说明书一示例性实施例的巡检云台的正剖视图。
47.图4所示为本说明书一示例性实施例的巡检云台的回转组件与底座的装配示意图。
48.图5所示为本说明书一示例性实施例的巡检云台的俯仰组件与回转组件的装配示意图。
具体实施方式
49.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本说明书相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本说明书的一些方面相一致的装置和方法的例子。
50.在本说明书使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本说明书。除非另作定义,本说明书使用的技术术语或者科学术语应当为本说明书所属领域内具有一般技能的人士所理解的通常意义。本说明书以及权利要求书中使用的“第一”“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。同样,“一个”或者“一”等类似词语也不表示数量限制,而是表示存在至少一个。“多个”或者“若干”表示两个及两个以上。除非另行指出,“前部”、“后部”、“下部”和/或“上部”等类似词语只是为了便于说明,而并非限于一个位置或者一种空间定向。“包括”或者“包含”等类似词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而且可以包括电性的连接,不管是直接的还是间接的。
51.下面结合附图,对本说明书的巡检云台进行详细说明。在不冲突的情况下,下述的实施例及实施方式中的特征可以相互组合。
52.参见图1至图3所示,本说明书实施例提供一种巡检云台,可应用于车载云台、监控摄像头等环境。巡检云台包括底座10、回转组件20、俯仰组件30以及拍摄器40。其中,回转组件20绕第一方向x转动设置于所述底座10。俯仰组件30绕第二方向y转动设置于所述回转组件20,所述第一方向x与所述第二方向y垂直。拍摄器40设置于所述俯仰组件30。在本实施例中,所述第一方向x为竖直方向,所述第二方向y为水平方向。可选地,底座10可以设置安装接口,通过安装接口可以将巡检云台安装在外部的机器人升降机构或移动平台上,也可以
通过卡扣、螺钉等方式安装在外部的机器人升降机构或移动平台上,云台与机器人平台引出的控制线缆接通后,为云台提供电源和信息交互通道,云台整体一体化设计,更具备产品化功能。底座10、回转组件20及俯仰组件30的壳体可以采用塑料壳体,或是金属壳体。
53.本说明书提供的巡检云台,将回转组件20、俯仰组件30以及拍摄器40设计为一体化的整体结构,结构简洁占用体积小。底座10作为固定端,通过回转组件20绕竖直方向做水平回转运动,通过俯仰组件30绕水平方向做俯仰运动,能够带动拍摄器40从两个方向实现运动自由度,分别为水平回转运动自由度和俯仰运动自由度,以达到对周围环境物体做全方位观察的目的,适用于对大范围进行扫描监视,可以扩大摄像机的监视范围。
54.在一些可选的实施方式中,巡检云台还可以包括补光灯组件41,设于所述俯仰组件30的前部,可以对拍摄器40补光实现辅助拍摄,提高拍摄质量。
55.在一些可选的实施方式中,巡检云台还可以包括红外传感器42,设于所述俯仰组件30。红外传感器42可以探测到云台附件的物体,为云台提供避障检测功能,防止云台碰撞到外界物体受损。在本实施例中,红外传感器42的数量为两个,其中一个设在俯仰组件30的前部,另一个设在俯仰组件30的顶部。
56.在一些可选的实施方式中,巡检云台还可以包括夜视摄像头43,设于所述俯仰组件30的前部,实现夜间拍摄的功能,使巡检云台具备了白天和夜晚全天时间段的监测观察能力。
57.在一些可选的实施方式中,俯仰组件30包括第二壳体31、前面板32以及透视玻璃33,透视玻璃33预先胶粘在前面板32。在本实施例中,透视玻璃33的数量为两个,沿竖直方向布置在前面板32上。拍摄器40设置第二壳体31内,并对应前面板32上其中一个透视玻璃33的位置,通过该透视玻璃33对外拍摄。红外传感器42和夜视摄像头43可以设置第二壳体31内并与拍摄器40处于同一高度,与拍摄器40对应同一个透视玻璃33的位置,通过该透视玻璃33对外拍摄以及探测。补光灯组件41设置第二壳体31内,并对应前面板32上另一个透视玻璃33的位置,通过该透视玻璃33对外补光照射。
58.其中,第二壳体31可以包括上壳体311和下壳体312,上壳体311和下壳体312之间通过螺钉313固定,从而组装成第二壳体31。下壳体312的底部设有紧固孔,螺钉313自所述紧固孔内将上壳体311和下壳体312固定,从外观上无锁紧螺钉外露,保证了云台的外观整洁美观。下壳体312上设有开槽,在将上壳体311和下壳体312相互组装之前,先将前面板32卡接在该开槽内,并在拍摄器40与前面板32之间设置有eva泡棉34,可以避免前面板32挤压到拍摄器40,还可以避免从透视玻璃33观察到俯仰组件30的内部,影响产品美观。
59.在一些可选的实施方式中,巡检云台还可以包括云台控制板44、拍摄器主板45以及支架46,云台控制板44能够控制回转组件20和俯仰组件30工作,拍摄器主板45能够控制拍摄器40工作。拍摄器主板45通过螺钉固定在下壳体312,云台控制板44、夜视摄像头43以及补光灯组件41可以通过螺钉锁紧固定在支架46上,支架46于第二壳体31内固定在下壳体312。
60.在一些可选的实施方式中,所述回转组件20包括第一壳体21,与所述底座10转动连接。所述巡检云台还包括用于驱动所述回转组件20绕所述第一方向x转动的第一驱动组件50,所述第一驱动组件50包括第一齿轮51和第一电机52。
61.其中,第一齿轮51部分设于所述第一壳体21内,所述第一齿轮51位于所述第一壳
体21外的部分与所述底座10固定连接,所述第一齿轮51的轴向沿所述第一方向x设置。第一电机52设于所述第一壳体21内并与所述第一壳体21固定连接,所述第一电机52包括第一传动齿521,所述第一传动齿521与所述第一齿轮51啮合。
62.云台上电后,云台控制板44能够控制所述第一电机52转动,由于第一齿轮51与底座10固定,因此第一电机52转动能够带动所述第一传动齿521绕所述第一齿轮51转动,从而带动所述第一壳体21绕所述第一方向x相对所述底座10转动,从而实现回转组件20做水平回转运动。
63.在一些可选的实施方式中,所述第一驱动组件50还包括第一轴承53和第一安装板54。第一轴承53套接于所述第一齿轮51位于所述第一壳体21内的第一端部(图中所示为上端部)。第一安装板54套接于所述第一轴承53的外部,所述第一安装板54与所述第一壳体21固定连接,所述第一电机52固定于所述第一安装板54。通过设置第一轴承53,第一安装板54与第一齿轮51之间能够实现相对转动,从而使第一电机52转动时,能够通过第一安装板54带动第一壳体21一同相对第一齿轮51转动,实现水平回转运动。
64.组装时,先在第一齿轮51的上端部安装第一轴承53,第一安装板54通过预加工配合孔套入第一轴承53,实现同轴定位,并通过螺钉与第一壳体21固定。第一电机52按预加工固定孔位安装在第一安装板54上,安装后第一电机52的第一传动齿521与第一齿轮51啮合。
65.在一些可选的实施方式中,所述底座10靠近所述回转组件20的一侧端部(图中所示为上端部)开设有收容槽11,所述第一壳体21靠近所述底座10的一侧端部(图中所示为下端部)设于所述收容槽11内。所述第一壳体21的外壁与所述收容槽11的内壁之间设有第一轴承组件。在本实施例中,第一轴承组件为双轴承组件,包括两个轴承12以及连接于两个轴承12之间的间隔套13。可以理解的,底座10与回转组件20之间通过第一轴承组件定位。所述第一齿轮51位于所述第一壳体21外的第二端部穿过所述第一轴承组件的轴承孔并于所述收容槽11内通过螺钉14与所述底座10固定连接。回转组件20还可以包括挡板15,设置于第一轴承组件的外侧并与第一壳体21固定,固定后将第一轴承组件限位在第一壳体21内。通过设置第一轴承组件,第一壳体21与底座10之间能够实现相对转动。
66.在一些可选的实施方式中,所述第一齿轮51位于所述第一壳体21内的第一端部(图中所示为上端部)设有第一收容孔,所述第一驱动组件50还包括第一磁铁55和第一磁编码器56,第一磁铁55可以通过胶贴的方式设于所述第一收容孔内。第一磁编码器56与所述第一磁铁55同轴设置,固定于所述第一安装板54,从而固定于第一壳体21。
67.回转组件20转动时,由于第一磁铁55固定于第一齿轮51,因此第一磁铁55的位置是固定不变的,第一磁编码器56随第一壳体21一同转动,因此能够感应到第一磁铁55相对第一磁编码器56的位置变化。如此设置,通过第一磁铁55和第一磁编码器56的磁感应配合,能够反馈回转组件20转动时的位置,从而精准控制回转组件20的转动角度。如此设置,云台具备旋转角度实时反馈,做到了闭环控制,实现云台精准位置的控制与反馈。在本实施例中,回转组件20转动的角度范围为
±
150
°
。
68.参见图4所示,在一些可选的实施方式中,所述回转组件20内设有第一光电传感器22,所述底座10靠近所述回转组件20的一侧设有凸起16,所述回转组件20相对所述底座10转动至所述凸起16将所述第一光电传感器22遮挡的位置为所述回转组件20的初始位置。可选地,回转组件20内还可以设置接线板23,接线板23与第一壳体21固定,第一光电传感器22
设于接线板23。
69.可以理解的,第一电机52栓接在第一安装板54上,与第一齿轮51形成齿轮副。云台上电后,第一电机52转动,通过齿轮副驱动回转组件20水平回转运动。由于第一齿轮51与底座10固定,当回转组件20旋转至一定角度后,固定在接线板23上的第一光电传感器22受底座10上预加工形成的凸起16遮挡并触发,第一电机52停止转动,此时默认回转组件20的位置为零点位置,也即初始位置。巡检云台每次工作结束后,云台控制板均会控制回转组件20回转至该初始位置。
70.在一些可选的实施方式中,所述回转组件20的相对两侧部均沿同一方向向外延伸(图中所述为向上延伸)形成有侧边部24,两个所述侧边部24的内壁均设有沿所述第二方向y设置的转轴25。所述俯仰组件30包括第二壳体31,所述第二壳体31设置于两个所述侧边部24之间,所述转轴25部分穿设于所述第二壳体31并与所述第二壳体31转动连接,从而实现俯仰组件30与回转组件20之间的相对转动。在本实施例中,转轴25可以通过螺钉26与侧边部24固定,依靠加工精度保证同心。
71.在一些可选的实施方式中,所述巡检云台还包括用于驱动所述俯仰组件30绕所述第二方向y转动的第二驱动组件60,所述第二驱动组件60包括第二齿轮61和第二电机62。
72.其中,第二齿轮61设于所述第二壳体31内并与其中一个所述转轴25固定连接(图3中所示为与左侧的转轴25固定),所述第二齿轮61的轴向沿所述第二方向y设置。第二电机62设于所述第二壳体31内并与所述第二壳体31固定连接,所述第二电机62包括第二传动齿(未图示),所述第二传动齿与所述第二齿轮61啮合。
73.云台上电后,云台控制板44能够控制所述第二电机62转动,由于第二齿轮61与转轴25固定,因此第二电机62转动带动所述第二传动齿绕所述第二齿轮61转动,从而带动所述第二壳体31绕所述第二方向y相对所述转轴25转动,从而实现俯仰组件30做俯仰运动。
74.在一些可选的实施方式中,所述第二驱动组件60还包括第二轴承63和第二安装板64。第二轴承63套接于所述第二齿轮61靠近所述第二电机62的第一端部。第二安装板64套接于所述第二轴承63的外部,所述第二安装板64与所述第二壳体31固定连接,所述第二电机62固定于所述第二安装板64。通过设置第二轴承63,第二安装板64与第二齿轮61之间能够实现相对转动,从而使第二电机62转动时,能够通过第二安装板64带动第二壳体31一同相对第二齿轮61转动,实现俯仰运动。
75.组装时,先在第二齿轮61靠近所述第二电机62的第一端部安装第二轴承63,第二安装板64通过预加工配合孔套入第二轴承63,实现同轴定位,并通过螺钉与第二壳体31固定。第二电机62按预加工固定孔位安装在第二安装板64上,安装后第二电机62的第二传动齿与第二齿轮61啮合。
76.在一些可选的实施方式中,所述转轴25的外部套设有第二轴承组件27,所述第二轴承组件27的外部卡接有压盖28,所述压盖28与所述第二壳体31固定,固定后将第二轴承组件限位在第二壳体31内。通过设置第二轴承组件27,第二壳体31与转轴25之间能够实现相对转动。
77.在一些可选的实施方式中,所述第二齿轮61靠近所述第二电机62的第一端部设有第二收容孔,所述第二驱动组件60还包括第二磁铁65和第二磁编码器66,第二磁铁65可以通过胶贴的方式设于所述第二收容孔内。第二磁编码器66与所述第二磁铁65同轴设置,固
定于所述第二安装板64,从而固定于第二壳体31。
78.俯仰组件30转动时,由于第二磁铁65固定于第二齿轮61,因此第二磁铁65的位置是固定不变的,第二磁编码器66随第二壳体31一同转动,因此能够感应到第二磁铁65相对第二磁编码器66的位置变化。如此设置,通过第二磁铁65和第二磁编码器66的磁感应配合,能够反馈俯仰组件30转动时的位置,从而精准控制俯仰组件30的转动角度。如此设置,云台具备旋转角度实时反馈,做到了闭环控制,实现云台精准位置的控制与反馈。在本实施例中,俯仰组件30转动的角度范围为
±
45
°
79.参见图5所示,在一些可选的实施方式中,所述俯仰组件30内设有第二光电传感器35,所述俯仰组件30相对所述回转组件20转动至所述第二齿轮61将所述第二光电传感器35遮挡的位置为所述俯仰组件30的初始位置。可选地,第二光电传感器35设于云台控制板44。
80.可以理解的,第二电机62栓接在第二安装板64上,与第二齿轮61形成齿轮副。云台上电后,第二电机62转动,通过齿轮副驱动俯仰组件30水平回转运动。由于第二齿轮61与转轴25固定,当俯仰组件30旋转至一定角度后,第二光电传感器35受第二齿轮61遮挡并触发,第二电机62停止转动,此时默认俯仰组件30的位置为零点位置,也即初始位置。巡检云台每次工作结束后,云台控制板均会控制俯仰组件30回转至该初始位置。
81.在本说明书使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本说明书。在本说明书和所附权利要求书中所使用的单数形式的“一种”、“所述”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
82.本领域技术人员在考虑说明书及实践这里公开的申请后,将容易想到本说明书的其它实施方案。本说明书旨在涵盖本说明书的任何变型、用途或者适应性变化,这些变型、用途或者适应性变化遵循本说明书的一般性原理并包括本说明书未公开的本技术领域中的公知常识或惯用技术手段。说明书和实施例仅被视为示例性的,本说明书的真正范围和精神由下面的权利要求指出。
83.应当理解的是,本说明书并不局限于上面已经描述并在附图中示出的精确结构,并且可以在不脱离其范围进行各种修改和改变。本说明书的范围仅由所附的权利要求来限制。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
