1.本发明属于脚踏控制器设计领域,特别是一种可调节式的脚踏控制器。
背景技术:
2.脚踏控制器是一种输入设备,一般用于无人机等设备的刹车和偏航操作,用于进行复杂操作时解放驾驶员的双手,进行更为精密的操作,不易产生误操作。现存的脚踏控制器只实现了刹车和偏航操作的功能,未在人机工学的角度考虑不同人群操作的舒适性。
技术实现要素:
3.本发明的目的在于针对现有技术存在的不足,提供一种可调节式的脚踏控制器,在实现偏航操作功能、刹车操作功能的基础上,引进阻尼调节功能和踏板长度调节功能,适用于不同人群的操作需求。
4.实现本发明目的的技术解决方案为:一种可调节式的脚踏控制器,该可调节式的脚踏控制器包括偏航机构、左踏板刹车机构、右踏板刹车机构、阻尼器机构、壳体、顶盖;所述偏航机构用于实现脚踏控制器的偏航操作功能;所述左踏板刹车机构和右踏板刹车机构用于实现脚踏控制器的刹车操作功能和踏板长度调节功能,左踏板刹车机构和右踏板刹车机构安装在偏航机构上;所述阻尼器机构用于实现脚踏控制器的阻尼调节功能,阻尼器机构安装在偏航机构上;所述壳体和顶盖安装在偏航机构外部,用于保护内部结构。
5.进一步地,所述偏航机构包括下壳体、固定盘、第一无油衬套、主轴、第二无油衬套、摆杆、连杆、弹簧、螺母、垫片、挡板、凸轮随动器、导轨、安装板;所述下壳体作为偏航机构的底座,也为整个脚踏控制器的底座;所述固定盘通过紧固件固定在下壳体上的中间位置,所述第一无油衬套套在固定盘内,所述主轴套在第一无油衬套内,主轴可相对于固定盘相对转动;所述挡板通过紧固件固定在主轴底部,垫片设置于固定盘和挡板之间,挡板和垫片用于限制主轴的轴向自由度;所述第二无油衬套内径套在主轴上,两个所述摆杆套在第二无油衬套外径上,两个摆杆可相对于主轴转动,两个所述弹簧套在摆杆的臂上,在弹簧预紧力的作用下,两个摆杆的臂顶在下壳体的块上,迫使两个摆杆转动时自动回位,提供偏航机构自回位的力;所述连杆上开有腰形槽,套在主轴的腰形凸台上并通过螺母拧紧,连杆可和主轴一起转动;所述连杆上设有凸台,伸进两个摆杆的臂中间,连杆向一个方向转动时,连杆上的凸台可带动相应的摆杆朝同一方向转动;两个所述导轨安装在下壳体上固定盘的两侧,两个所述安装板分别安装在两个导轨的滑块上,可随滑块一起滑动;两个所述凸轮随动器分别安装在连杆两侧,所述安装板上开有槽,凸轮随动器伸进槽内,安装板、凸轮随动器和连杆行成一个连杆滑块机构,当安装板滑动时,可带动连杆转动,进而带动摆杆转动。
6.进一步地,所述偏航机构上安装有限位支架,所述限位支架安装在导轨两端,用于限制安装板的行程,即可限制偏航机构的行程。
7.进一步地,所述偏航机构上安装第一齿轮、第一传感器和第二齿轮,其中所述第一齿轮固定在主轴上,所述第二齿轮安装在第一传感器的轴上,第一齿轮和第二齿轮相啮合,
主轴转动时通过第一齿轮、第二齿轮和第一传感器的轴的联动带动第一传感器转动,将位置信号转换为电信号。
8.进一步地,所述阻尼器机构通过阻尼器支架、阻尼器安装板和紧固件安装在偏航机构上,且所述阻尼器机构套在主轴上。
9.进一步地,所述阻尼器机构包括阻尼器壳体、轴承、轴承挡板、阻尼器主轴、摩擦片、阻尼器压板、蝶形弹簧、调节轴和阻尼器上盖;所述阻尼器壳体为一圆柱形外壳,底面开有轴承孔用于安装轴承,壳体内部用于放置阻尼器机构的其他组件;所述阻尼器主轴上设有一个圆盘,阻尼器主轴通过轴承套在阻尼器壳体内,可上下窜动;所述摩擦片分别设置于阻尼器主轴的圆盘的上下方,与圆盘相互摩擦;所述阻尼器压板设置于上侧摩擦片的上方,阻尼器压板内部放置有若干蝶形弹簧;所述阻尼器上盖通过紧固件安装在阻尼器壳体上方,阻尼器上盖的中心位置开有螺纹孔,调节轴通过螺纹拧进阻尼器上盖内并压紧蝶形弹簧,压迫摩擦片受力,转动调节轴可调节上下位置,改变蝶形弹簧的受力,调节阻尼器主轴转动的阻尼力。
10.进一步地,所述左踏板刹车机构和右踏板刹车机构为对称机构,分别安装在偏航机构左右两侧的安装板上;所述下壳体上方安装有上壳体,上壳体在左踏板刹车机构和右踏板刹车机构相应的位置开有槽,供左踏板刹车机构和右踏板刹车机构带动导轨上的滑块滑动,实现偏航功能。
11.进一步地,该脚踏控制器还包括安装在左踏板刹车机构和右踏板刹车机构两侧的防尘挡板,用于挡住设置于上壳体上的槽,防止灰尘进入。
12.进一步地,该脚踏控制器还包括安装在阻尼器机构的调节轴上的旋钮,转动旋钮即可调节偏航机构的阻尼力。
13.本发明与现有技术相比,其显著优点为:可实现偏航操作功能、刹车操作功能、阻尼调节功能和踏板长度调节功能,可用于无人机、无人艇操控和各种操作装置仿真平台,适合不同人群使用。
14.下面结合附图对本发明作进一步详细描述。
附图说明
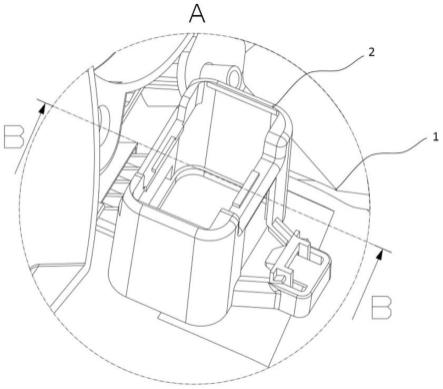
15.图1是本发明的整体结构主视图。
16.图2是本发明的整体结构侧视图。
17.图3是本发明的整体结构俯视图。
18.图4是偏航机构的示意图。
19.图5是偏航机构的部分结构示意图。
20.图6是偏航机构的部分结构斜视图。
21.图7是本发明的剖视图。
22.图8是阻尼器机构的剖视图。
23.图9是本发明的部分结构的俯视图。
24.图10是踏板刹车机构的侧视图。
25.图11是踏板刹车机构的后视图。
26.图12是刹车机构的剖面图1。
27.图13是刹车机构的剖面图2。
28.图14是踏板长度调节机构的俯视图。
29.图15是踏板长度调节机构的部分结构示意图1。
30.图16是踏板长度调节机构的部分结构示意图2。
31.图17是前踏板的俯视图。
32.图中附图标记说明:
33.1—偏航机构,2—左踏板刹车机构,3—右踏板刹车机构,4—阻尼器机构,5—上壳体,6—顶盖,7—防尘挡板,8—旋钮,101—下壳体,102—固定盘,103—第一无油衬套,104—主轴,105—第二无油衬套,106—摆杆,107—连杆,108—弹簧,109—螺母,110—垫片,111—挡板,112—凸轮随动器,113—导轨,114—安装板,115—限位支架,116—第一齿轮,117—第二齿轮,118—角度传感器,201—阻尼器支架,202—阻尼器安装板,203—阻尼器壳体,204—轴承,205—轴承挡板,206—阻尼器主轴,207—摩擦片,208—阻尼器压板,209—蝶形弹簧210—调节轴,211—阻尼器上盖,1’—刹车机构,2’—踏板长度调节机构,101’—壳体,102’—第一无油衬套,103’—第二无油衬套,104’—第一弹簧,105’—第二弹簧,106’—铰链销,107’—铰链销支架,108’—弹簧压块,109’—第一齿轮,110’—第二齿轮,111’—角度传感器,112’—支柱,1011’—限位孔,201’—导轨板,202’—后踏板,203’—前踏板,204’—导轨衬套,205’—第一衬套挡板,206’—第二衬套挡板,207’—第三衬套挡板,208—按压块,209’—第三弹簧,210’—导向螺钉,211’—弹簧挡板,212’—限位块,2031’—限位槽。
具体实施方式
34.为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅仅用以解释本技术,并不用于限定本技术。
35.需要说明,若本发明实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
36.另外,若本发明实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本发明要求的保护范围之内。
37.结合图1至图3,本发明提供了一种可调节式的脚踏控制器,该可调节式的脚踏控制器包括偏航机构1、左踏板刹车机构2、右踏板刹车机构3、阻尼器机构4、壳体、顶盖;所述偏航机构1用于实现脚踏控制器的偏航操作功能;所述左踏板刹车机构2和右踏板刹车机构3用于实现脚踏控制器的刹车操作功能和踏板长度调节功能,左踏板刹车机构2和右踏板刹车机构3安装在偏航机构1上;所述阻尼器机构4用于实现脚踏控制器的阻尼调节功能,阻尼器机构安装在偏航机构1上;所述壳体和顶盖安装在偏航机构1外部,用于保护内部结构。
38.结合图3至图7,所述偏航机构包括下壳体101、固定盘102、第一无油衬套103、主轴104、第二无油衬套105、摆杆106、连杆107、弹簧108、螺母109、垫片110、挡板111、凸轮随动器112、导轨113、安装板114;所述下壳体101作为偏航机构的底座,也为整个脚踏控制器的底座;所述固定盘102通过紧固件固定在下壳体101上的中间位置,所述第一无油衬套103套在固定盘102内,所述主轴104套在第一无油衬套103内,主轴104可相对于固定盘102相对转动;所述挡板111通过紧固件固定在主轴104底部,垫片110设置于固定盘102和挡板111之间,挡板111和垫片110用于限制主轴104的轴向自由度;所述第二无油衬套105内径套在主轴104上,两个所述摆杆106套在第二无油衬套105外径上,两个摆杆106可相对于主轴104转动,两个所述弹簧108套在摆杆106的臂上,在弹簧108预紧力的作用下,两个摆杆106的臂顶在下壳体101的块上,迫使两个摆杆106转动时自动回位,提供偏航机构自回位的力;所述连杆107上开有腰形槽,套在主轴104的腰形凸台上并通过螺母拧紧,连杆107可和主轴104一起转动;所述连杆107上设有凸台,伸进两个摆杆106的臂中间,连杆107向一个方向转动时,连杆107上的凸台可带动相应的摆杆106朝同一方向转动;两个所述导轨113安装在下壳体101上固定盘102的两侧,两个所述安装板114分别安装在两个导轨113的滑块上,可随滑块一起滑动;两个所述凸轮随动器112分别安装在连杆107两侧,所述安装板114上开有槽,凸轮随动器112伸进槽内,安装板114、凸轮随动器112和连杆107行成一个连杆滑块机构,当安装板114滑动时,可带动连杆107转动,进而带动摆杆106转动。
39.所述偏航机构1上安装有限位支架115,所述限位支架115安装在导轨113两端,用于限制安装板114的行程,即可限制偏航机构1的行程。
40.所述偏航机构1上安装第一齿轮116、第一传感器(角度传感器)118和第二齿轮117,其中所述第一齿轮116固定在主轴104上,所述第二齿轮117安装在第一传感器118的轴上,第一齿轮116和第二齿轮117相啮合,主轴104转动时通过第一齿轮116、第二齿轮117和第一传感器118的轴的联动带动第一传感器118转动,将位置信号转换为电信号。
41.偏航机构1的工作原理可简化为双滑块摇杆机构。导轨113的滑块可前后滑动,与之配套的导轨之间相当于一个滑块机构;凸轮随动器112可在安装板114的槽内可左右滑动,相当于一个滑块机构;连杆107可绕主轴104轴心,带随主轴一起转动,相当于一个摇杆机构。当导轨113的滑块前后滑动时,带动双滑块摇杆机构运动,最终带动主轴104转动,并通过第一齿轮116和第二齿轮117,将转动传递到角度传感器118上。两个摆杆106套在主轴104上,两个摆杆106各伸出两个臂,两个弹簧108分别套在两个摆杆106两侧的臂上,下壳体上凸出来的两个挡块和连杆107上凸出的两个挡块分别伸进两个摆杆106的臂之间,连杆107转动时带动摆杆106转动,在弹簧108的作用下,限制摆杆106的转动,提供自回位的力。
42.结合图8,所述阻尼器机构4下方有d形孔,可以套在主轴104上,通过阻尼器支架201、阻尼器安装板202和紧固件安装在偏航机构1上。
43.所述阻尼器机构包括阻尼器壳体203、轴承204、轴承挡板205、阻尼器主轴206、摩擦片207、阻尼器压板208、蝶形弹簧209、调节轴210和阻尼器上盖211;所述阻尼器壳体203为一圆柱形外壳,底面开有轴承孔用于安装轴承204,壳体内部用于放置阻尼器机构的其他组件;所述阻尼器主轴206上设有一个圆盘,阻尼器主轴206通过轴承204套在阻尼器壳体203内,可上下窜动;所述摩擦片207分别设置于阻尼器主轴206的圆盘的上下方,与圆盘相互摩擦;所述阻尼器压板208设置于上侧摩擦片的上方,阻尼器压板208内部放置有若干蝶
形弹簧209;所述阻尼器上盖211通过紧固件安装在阻尼器壳体203上方,阻尼器上盖211的中心位置开有螺纹孔,调节轴210通过螺纹拧进阻尼器上盖211内并压紧蝶形弹簧209,压迫摩擦片207受力,转动调节轴210可调节上下位置,改变蝶形弹簧209的受力,调节阻尼器主轴206转动的阻尼力。
44.优选地,所述垫片、摩擦片选用非金属材料。
45.阻尼器机构4工作原理为:通过增加压力来提供阻尼力。旋转调节轴210,向下压紧蝶形弹簧209,蝶形弹簧209变形,提供压力压紧摩擦片207和阻尼器主轴206,摩擦片207和阻尼器主轴206之间的摩擦力随调节轴210提供的压力大小而相应变化。
46.结合图3和图9,所述左踏板刹车机构2和右踏板刹车机构3为对称机构,分别安装在偏航机构1左右两侧的安装板114上;所述下壳体101上方安装有上壳体5,上壳体5在左踏板刹车机构2和右踏板刹车机构3相应的位置开有槽,供左踏板刹车机构2和右踏板刹车机构3带动导轨上的滑块滑动,实现偏航功能。
47.该脚踏控制器还包括安装在左踏板刹车机构2和右踏板刹车机构3两侧的防尘挡板,用于挡住设置于上壳体5上的槽,防止灰尘进入。
48.该脚踏控制器还包括安装在阻尼器机构4的调节轴210上的旋钮8,转动旋钮8即可调节偏航机构1的阻尼力。
49.进一步地,作为一种具体示例,在其中一个实施例中,结合图10,所述踏板刹车机构包括刹车机构1’和踏板长度调节机构2’;所述刹车机构1’通过踏板旋转实现刹车功能,踏板长度调节机构2’安装在刹车机构1’上,用于调节踏板的长度。
50.进一步地,结合图12和图13,所述刹车机构1’包括壳体101’、第一无油衬套102’、第二无油衬套103’、第一弹簧104’、第二弹簧105’、铰链销106’、铰链销支架107’、弹簧压块108’、第一齿轮109’、第二齿轮110’、角度传感器111’、支柱112’;所述铰链销支架107’通过紧固件固定在支柱112’上,铰链销支架107’上设有通孔,用于穿过铰链销106’;所述铰链销106上套有第一无油衬套102’和两个第二无油衬套103’,其中第一无油衬套102’的外径较小,穿入到铰链销支架107’的通孔内,两个第二无油衬套103’顶在铰链销支架107’两端,起到定位作用;所述壳体101’上开有铰链销106’的安装孔,将铰链销106’及其上穿过的第一无油衬套102’、第二无油衬套103’和铰链销支架107’装配到壳体101’内部,通过螺母将铰链销106’拧紧,可以限制壳体101’相对于铰链销支架107’的左右位置,壳体101’下方开有限位孔1011’,供铰链销支架107’穿过,壳体101’可绕铰链销106’相对于铰链销支架107’转动;所述两个第二无油衬套103’上分别套有第一弹簧104’和第二弹簧105’,第一弹簧104’和第二弹簧105’的一侧支腿顶在壳体101’下侧,另一侧支腿压在弹簧压块108’下,弹簧压块108’通过紧固件固定在铰链销支架107’上;第一弹簧104’和第二弹簧105’安装时具有一定的预紧力,促使刹车机构自动回位;所述第一齿轮109’通过紧固件固定在铰链销支架107’上,所述角度传感器111’固定在壳体101’上,第二齿轮110’固定在角度传感器111’上,第一齿轮109’和第二齿轮110’相啮合,壳体101’转动时,可带动角度传感器111’转动,将壳体101转动的位置信号转换为电信号。
51.进一步优选地,所述壳体101’下方的限位孔1011’尺寸可调,用于实现限制壳体101’转动的角度。所述壳体101’转动时,支柱112’上与壳体101’的撞击面上设有支柱挡块。
52.进一步优选地,所述第一无油衬套102’、第二无油衬套103’和支柱挡块选用非金
属材料。
53.进一步地,结合图11和图14~图17,所述踏板长度调节机构2’包括导轨板201’、后踏板202’、前踏板203、导轨衬套204’、第一衬套挡板205’、第二衬套挡板206’、第三衬套挡板207’、按压块208’、第三弹簧209’、导向螺钉210’、弹簧挡板211’;所述导轨板201’通过紧固件安装在壳体101’上,可跟随壳体101’一起转动;所述后踏板202’通过紧固件安装在导轨板201’上;所述导轨板201’上设有“工”字形导轨,所述前踏板203’上开有贴合“工”字形导轨的内腔,前踏板203’可沿导轨板201’前后滑动实现踏板长度调节;所述导轨衬套204’安装在前踏板203’内,并通过第一衬套挡板205’、第二衬套挡板206’和第三衬套挡板207’进行定位以限制导轨衬套204和前踏板203’之间产生相对滑动,导轨衬套204’可随前踏板203’一起在导轨板201’上前后滑动;所述按压块208’安装在导轨板201’上开设的孔中,且按压块208上设有用于限制按压块208’从孔中掉出的凸台;所述第三弹簧209’装入按压块208’内,并由导向螺钉导向,导向螺钉安装在弹簧挡板211’上,弹簧挡板211’通过紧固件固定在导轨板201’底面,在弹簧作用下,按压块208’按压后可自动回位;所述前踏板203’和导轨衬套204’开有定位孔,按压块208’可伸进定位孔内,按压块208’伸进不同孔内时可实现踏板长度多档切换。
54.进一步地,所述导轨板201’上沿其轴向方向设有两个平行限位槽2031’,限位槽2031’中安装有前踏板203’限位块212’,可以避免在调节踏板长度时将前踏板203’拔出。
55.进一步地,所述前踏板203’和后踏板202’的接合处形状相互契合。
56.进一步优选地,所述导轨衬套204’选用非金属材料。
57.以上显示和描述了本发明的基本原理、主要特征及优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。