1.本发明涉及波前重构方法,尤其涉及一种基于正则化boole模型的波前重构方法。
背景技术:
2.在波前传感器测量过程中,从波前原始图像中重构出带有波前信息的图像,在大气测量、望远测量、远距离通信、等离子体测量等领域得到应用。
3.但传统的波前重构模型在重构计算时,往往会出现低频响应比较好,高频响应衰减很大的情况,这使得波前传感器在测量高频的目标时误差比较大,因此也限制了波前传感器的应用范围,是一个难以克服的问题。
技术实现要素:
4.本发明的目的在于解决传统的波前重构模型在重构计算时,高频响应衰减大导致波前传感器在测量高频目标时误差大的技术问题,而提供了一种基于正则化boole模型的波前重构方法。
5.为了实现上述技术问题,本发明提供的技术解决方案为:
6.一种基于正则化boole模型的波前重构方法,其特征在于,包括以下步骤:
7.1】采集点阵光斑图像数据;
8.2】根据点阵光斑图像数据计算空域波前斜率s
x
(x,y),sy(x,y);
9.3】根据空域波前斜率s
x
(x,y),sy(x,y)构建boole模型,并对boole模型进行优化,获得正则化boole模型波前相位频域表达式;
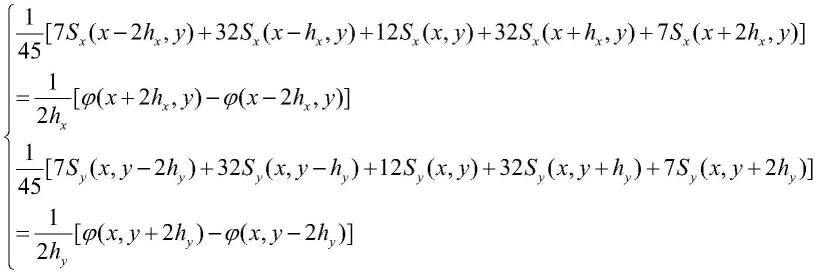
10.3.1】构建boole模型,所述boole模型的空域波前斜率与待测点空域波前相位关系建模表达式为:
[0011][0012]
其中,s
x
(x,y)、sy(x,y)分别为当前采样点x方向和y方向的空域波前斜率,表示待测点空域波前相位,h
x
、hy分别为x方向和y方向的采样间隔;
[0013]
3.2】对步骤3.1】获得的空域的建模表达式两端做离散傅里叶变换,得到boole模型频域波前斜率与待测点频域波前相位关系表达式;
[0014]
3.3】对步骤3.2】获得的boole模型频域波前斜率与待测点频域波前相位关系表达式求误差平方和;
[0015]
3.4】对步骤3.3】求得的误差平方和在频域求偏导数,通过频域波前相位估计值的最小二乘解,获得波前相位频域表达式;
[0016]
3.5】对步骤3.4】中的波前相位频域表达式引入正则项,得到正则化boole模型波前相位频域表达式;
[0017]
3.6】对步骤3.5】获得的正则化boole模型波前相位频域表达式的参数进行优化,得到最终的正则化boole模型波前相位频域表达式;
[0018]
4】对正则化boole模型波前相位频域表达式进行离散傅里叶逆变换,计算空域相位获得待测目标的波前重构图像。
[0019]
进一步地,步骤3.2】具体为:
[0020]
对boole模型的空域波前斜率与待测点空域波前相位关系建模表达式两端做离散傅里叶变换,得到频域波前斜率与待测点频域波前相位关系表达式:
[0021][0022]
其中,分别为x方向和y方向的频域波前斜率,为待测点频域波前相位;为x方向和y方向的平均算子,为x方向和y方向的微分算子;
[0023]
其中,的表达式分别为:
[0024][0025][0026][0027][0028]
其中k
x
,ky取值范围为[-π/(h
x
),π/(h
x
)-2π/(nh
x
)],n为采样点数,i为虚数单位。
[0029]
进一步地,步骤3.3】具体为:
[0030]
求频域波前斜率与待测点频域波前相位关系表达式的误差平方和
[0031][0032]
其中,为波前相位频域估计值。
[0033]
进一步地,步骤3.4】具体为:
[0034]
对步骤3.3】求得的误差平方和的表达式在频域求偏导数通过波前相位频域估计值的最小二乘解,获得波前相位频域表达式为:
[0035]
[0036]
式中ω
x
=k
xhx
=2πf
x
,ωy=k
yhy
=2πfy,其中f
x
,fy为空间归一化频率,取值为(-0.5,0.5)。
[0037]
进一步地,步骤3.5】具体为:
[0038]
对步骤3.4】中的波前相位频域表达式引入正则项,其引入的分母正则项空域表达式ε
r1
和分子正则项空域表达式ε
r2
分别为:
[0039][0040][0041]
其中,λ和γ为正则项的系数;为空域波前相位估计值;
[0042]
根据分母正则项空域表达式ε
r1
和分子正则项空域表达式ε
r2
,分别得到分母正则项频域表达式ε
reg1
和分子正则项频域表达式ε
reg2
:
[0043][0044]
其中,正则项x方向的微分算子正则项y方向的微分算子
[0045]
根据分母正则项频域表达式ε
reg1
和分子正则项频域表达式ε
reg2
,得到初步的正则化boole模型波前相位频域表达式:
[0046][0047]
其中,表示的共轭,表示的共轭。
[0048]
进一步地,步骤3.5】还包括:
[0049]
将步骤3.2】获得的的表达式,以及表达式代入初步的正则化boole模型波前相位频域表达式;引入系统调制函数
[0050]
令h
x
=hy=1,得到正则化boole模型波前相位频域表达式:
[0051][0052]
进一步地,步骤3.6】中,优化的参数为正则项的系数λ和γ。
[0053]
进一步地,步骤1】中,采集点阵光斑图像数据具体为:
[0054]
1.1】采集点阵光斑图像;
[0055]
1.2】对采集的点阵光斑图像进行预处理去除噪声干扰。
[0056]
进一步地,步骤1】中,采用夏克-哈特曼波前传感器采集光斑点阵图像。
[0057]
本发明相比于现有技术的有益效果为:
[0058]
1、本发明提供的一种基于正则化boole模型的波前重构方法,相比传统的方法,构建了基于正则化的boole模型,优化了频率响应特性,使其高频响应特性上表现良好,进而提高了波前传感器的测量精度,实现准确的波前重构计算。
[0059]
2、本发明提供的一种基于正则化boole模型的波前重构方法,计算的波前重构计算均在频域完成,其算法结构简单、计算量小,而且可以高效的并行化设计,提高了系统的运算速度。
[0060]
3、本发明提供的一种基于正则化boole模型的波前重构方法,对波前相位频域计算表达式的分子和分母同时引入正则项,可以进一步优化频率响应特性。
[0061]
4、本发明提供的一种基于正则化boole模型的波前重构方法,波前传感器采用了夏克-哈特曼波前传感器,其光能利用率高、探测速度快以及性能稳定的优点,进一步提高了波前图像复原的准确率。
附图说明
[0062]
图1为本发明一种基于正则化boole模型的波前重构方法流程图;
[0063]
图2为本发明实施例中boole空域波前重构模型示意图;
[0064]
图3为本发明实施例中正则化boole模型频率响应特性三维示意图;
[0065]
图4为本发明实施例中正则化boole模型x轴方向频率响应特性与传统模型曲线对比图。
具体实施方式
[0066]
为使本发明的优点和特征更加清楚,以下结合附图和具体实施例对本发明作进一步详细说明。
[0067]
如图1所示,一种基于正则化boole模型的波前重构方法,具体包括以下步骤:
[0068]
1】采集点阵光斑图像数据;
[0069]
1.1】采用高速高精度大靶面的夏克-哈特曼波前传感器采集光斑点阵图像数据;本实施例中,采用自主研发的夏克-哈特曼波前传感器采集图像数据,其靶面大小为2592*2048像素,微透镜阵列分辨率为128*128,其光能利用率高、探测速度快以及性能稳定的优
点,进一步提高了波前图像复原的准确率。
[0070]
1.2】对采集到的光斑点阵图像进行预处理,去除噪声干扰。
[0071]
2】根据点阵光斑图像数据计算空域波前斜率s
x
(x,y),sy(x,y);
[0072]
根据点阵光斑图像数据中待重构波前的区域计算空域波前斜率s
x
(x,y),sy(x,y);
[0073]
本实施例中所选取的计算区域为矩形区域,在其他实施例中当计算区域为不规则形状时,可以将不规则形状延拓为矩形进行选取。
[0074]
3】根据空域波前斜率s
x
(x,y),sy(x,y)构建boole模型,并对boole模型进行优化,获得正则化boole模型波前相位频域表达式;
[0075]
3.1】构建boole模型,如图2所示,boole模型的空域波前斜率与待测点空域波前相位关系建模表达式为:
[0076][0077]
其中,s
x
(x,y)为当前采样点x方向的空域波前斜率,sy(x,y)为当前采样点y方向的空域波前斜率,为待测点空域波前相位,h
x
为x方向采样间隔,hy为y方向的采样间隔;
[0078]
3.2】对公式(1)两端做离散傅里叶变换可得
[0079][0080]
其中,为x方向的频域波前斜率,为y方向的频域波前斜率,为待测点频域波前相位;为x方向和y方向的平均算子,为x方向和y方向的微分算子;
[0081]
其中,的表达式分别为:
[0082][0083][0084][0085][0086]
其中k
x
,ky取值范围为[-π/(h
x
),π/(h
x
)-2π/(nh
x
)],n为采样点数,i为虚数单位;
[0087]
3.3】求公式(2)的误差平方和其表达式为
[0088][0089]
其中,为波前相位频域估计值;
[0090]
3.4】对公式(3)在频域求偏导数通过波前相位频域估计值的最小二乘解,获得波前相位频域表达式为:
[0091][0092]
式中ω
x
=k
xhx
=2πf
x
,ωy=k
yhy
=2πfy,其中f
x
,fy为空间归一化频率,取值为(-0.5,0.5)。
[0093]
3.5】为优化其频率响应特性,对波前相位频域表达式,即对公式(4)引入正则项,本实例中在分子、分母同时引入了正则项;
[0094]
其中,分母正则项空域表达式ε
r1
和分子正则项空域表达式ε
r2
分别为:
[0095][0096][0097]
其中,λ和γ为正则项的系数;表示空域波前相位估计值;
[0098]
根据分母正则项空域表达式ε
r1
和分子正则项空域表达式ε
r2
,分别得到分母正则项频域表达式ε
reg1
和分子正则项频域表达式ε
reg2
:
[0099][0100]
其中,正则项x方向的微分算子正则项y方向的微分算子
[0101]
根据分母正则项频域表达式ε
reg1
和分子正则项频域表达式ε
reg2
,得到初步的正则化boole模型波前相位频域表达式:
[0102]
[0103]
其中,表示的共轭,表示的共轭。
[0104]
3.6】将步骤3.2】获得的的表达式,以及步骤3.5】的中的表达式代入公式(5),即代入初步的正则化boole模型波前相位频域表达式;引入系统调制函数
[0105]
同时,考虑到微透镜阵列的调制影响,令h
x
=hy=1,得到正则化boole模型波前相位频域计算表达式:
[0106][0107]
3.7】优化正则项的系数λ,γ,即对正则化boole模型的频率响应特性进行优化,得到最终的正则化boole模型波前相位频域计算表达式。
[0108]
本实施例中选取的正则项的系数λ=16,γ=13,其空间频率响应特性如图3,图4所示,图3为正则化boole模型频率响应特性三维示意图,图4为正则化boole模型x轴方向频率响应特性和其他三种传统模型频率响应特性的对比,可以看出在增加正则项后,系统的频率响应特性明显改善,相较于其他模型,该模型在整个频段范围内频率响应特性更接近于单位频率响应特性,模型的频率响应特性更好。
[0109]
4】利用idft计算空域波前相位获得待测目标的波前重构图像。
[0110]
对正则化boole模型波前相位频域表达式进行离散傅里叶逆变换(idft),计算空域波前相位获得待测目标的波前重构图像。
[0111]
本实施例中所选取的计算区域为矩形区域,采用快速算法ifft计算空域波前相位以上所述,仅用以说明本发明的技术方案,而非对其限制,对于本领域的普通专业技术人员来说,可以对上述实施例所记载的具体技术方案进行修改,或者对其中部分技术特征进行等同替换,而这些修改或者替换,并不使相应技术方案的本质脱离本发明所保护技术方案的范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
