1.本发明属于机械手技术领域,涉及一种柔性机械手。
背景技术:
2.随着自动化技术的发展,机械手的应用已经从传统的工业领域逐步进入到农业生产,林业规划以及医疗辅助器械当中。机械手的优点在于自动化程度高,动作灵敏快捷。目前,大多数机械手只能抓取形状规则的物体,而且当抓取对象发生变化时,机械手则不能使用。
技术实现要素:
3.本发明的目的在于克服上述现有技术的不足,提供一种柔性机械手,可抓取外形不规则物体。该机械手采用旋转气缸驱动,通过钢丝绳控制手部姿态,达到抓取的目的。
4.为解决上述技术问题,本发明通过以下技术方案实现:一种柔性机械手,包括辅助爪1、第一弹簧圈2、硅胶片3、上弹簧支撑架4、钢丝绳5、第二弹簧圈6、下弹簧支撑架7、定位环8、滑轮9、托盘10、端盖11、旋转套筒12、从动齿轮13、外壳14和主轴20,所述托盘10固定在主轴20上;所述托盘10上表面边缘设置有定位环8,下表面边缘设置有滑轮9,且下表面的滑轮9位置与上表面的定位环8位置对应;所述硅胶片3的下端固定在托盘10上,上端固定在第一弹簧圈2上;所述硅胶片3的中间靠下部位安装有第二弹簧圈6;所述第一弹簧圈2的圆周上设置有辅助爪1;所述第一弹簧圈2的直径与托盘10的直径相等,且大于第二弹簧圈6的直径;所述旋转套筒12通过轴承安装在主轴20上;所述从动齿轮13与旋转套筒12通过键连接;所述上弹簧支撑架4和下弹簧支撑架7固定在硅胶片3的外表面;所述上弹簧支撑架4的上端与第一弹簧圈2通过铰链连接;所述下弹簧支撑架7的下端与托盘10通过铰链连接;所述上弹簧支撑架4的下端与下弹簧支撑架7的上端通过铰链连接,且该铰链固定在第二弹簧圈6上;所述端盖11加工有中心孔,且沿圆周均匀加工有8个通孔;所述端盖11嵌在外壳14上;所述主轴20穿过端盖11的中心孔;所述钢丝绳5上端固定在上弹簧支撑架4与第一弹簧圈2的铰链连接处,下端穿过定位环8和滑轮9以及端盖11上的通孔固定在旋转套筒12上。
5.所述外壳14由上下两部分对称结构组成;所述从动齿轮13和主动齿轮17相啮合;所述主动齿轮17与主动轴18通过键连接;所述主动轴18的一端通过深沟球轴承19与外壳14连接,另一端通过联轴器16与旋转气缸15连接;所述辅助爪1、上弹簧支撑架4、钢丝绳5、下弹簧支撑架7、定位环8和滑轮9的数量均为8个。
6.本发明的有益效果是:通过设置辅助爪有利于抓取任何形状的物体,利用硅胶片和弹簧支撑架的延展性可以抓取不同大小的物体,采用旋转气缸驱动响应速度快,安全可靠,且对环境无污染;通过钢丝绳控制机械手的姿态,结构简单,制造成本低。
附图说明
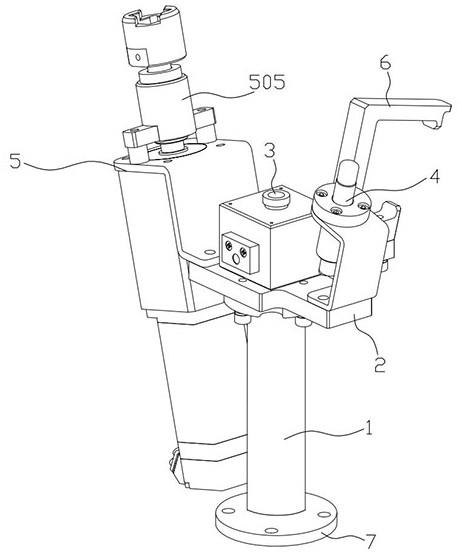
7.图1是本发明柔性机械手的结构示意图。
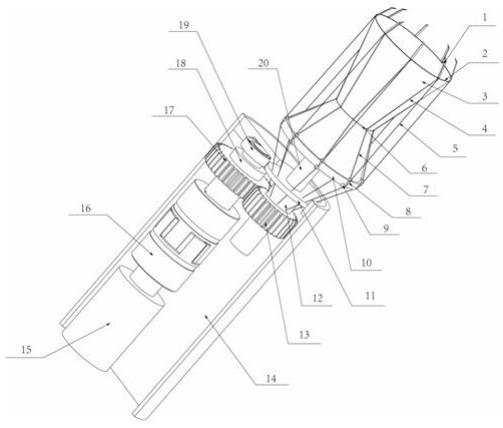
8.图2是本发明柔性机械手外壳的结构示意图。
9.附图中:1、辅助爪;2、第一弹簧圈;3、硅胶片;4、上弹簧支撑架;5、钢丝绳;6、第二弹簧圈;7、下弹簧支撑架;8、定位环;9、滑轮;10、托盘;11、端盖;12、旋转套筒;13、从动齿轮;14、外壳;15、旋转气缸;16、联轴器;17、主动齿轮;18、主动轴;19、深沟球轴承;20、主轴。
具体实施方式
10.下面结合附图和具体实施方式对本发明做进一步描述,但它们不是对本发明的限制:如图1和图2所示,一种柔性机械手,包括辅助爪1、第一弹簧圈2、硅胶片3、上弹簧支撑架4、钢丝绳5、第二弹簧圈6、下弹簧支撑架7、定位环8、滑轮9、托盘10、端盖11、旋转套筒12、从动齿轮13、外壳14和主轴20,所述托盘10固定在主轴20上;所述托盘10上表面边缘设置有定位环8,下表面边缘设置有滑轮9,且下表面的滑轮9位置与上表面的定位环8位置对应;所述硅胶片3的下端固定在托盘10上,上端固定在第一弹簧圈2上;所述硅胶片3的中间靠下部位安装有第二弹簧圈6;所述第一弹簧圈2的圆周上设置有辅助爪1;所述第一弹簧圈2的直径与托盘10的直径相等,且大于第二弹簧圈6的直径;所述旋转套筒12通过轴承安装在主轴20上;所述从动齿轮13与旋转套筒12通过键连接;所述上弹簧支撑架4和下弹簧支撑架7固定在硅胶片3的外表面;所述上弹簧支撑架4的上端与第一弹簧圈2通过铰链连接;所述下弹簧支撑架7的下端与托盘10通过铰链连接;所述上弹簧支撑架4的下端与下弹簧支撑架7的上端通过铰链连接,且该铰链固定在第二弹簧圈6上;所述端盖11加工有中心孔,且沿圆周均匀加工有8个通孔;所述端盖11嵌在外壳14上;所述主轴20穿过端盖11的中心孔;所述钢丝绳5上端固定在上弹簧支撑架4与第一弹簧圈2的铰链连接处,下端穿过定位环8和滑轮9以及端盖11上的通孔固定在旋转套筒12上。
11.所述外壳14由上下两部分对称结构组成;所述从动齿轮13和主动齿轮17相啮合;所述主动齿轮17与主动轴18通过键连接;所述主动轴18的一端通过深沟球轴承19与外壳14连接,另一端通过联轴器16与旋转气缸15连接;所述辅助爪1、上弹簧支撑架4、钢丝绳5、下弹簧支撑架7、定位环8和滑轮9的数量均为8个。
12.工作过程如下:旋转气缸15带动主动轴18旋转一定的角度,主动轴18带动主动齿轮17旋转,从而带动从动齿轮13旋转一定的圈数;从动齿轮13通过键与旋转套筒12连接,因此旋转套筒12与从动齿轮13旋转相同的圈数;此时,钢丝绳5缠绕在旋转套筒12上造成长度缩短,第一弹簧圈2在钢丝绳5的拉力和上弹簧支撑架4的支持力下张开;待目标物体进入第一弹簧圈2后旋转气缸15反方向旋转,从而使钢丝绳5恢复原长,第一弹簧圈2收缩,将目标物体包裹在硅胶片3结构内,达到抓取的目的。
13.总之,以上所述仅为本发明的较佳实施范例,凡依本发明申请专利的范围所作的均等变化与修饰,皆应属于本发明的涵盖范围。
技术特征:
1.一种柔性机械手,其特征在于,包括辅助爪(1)、第一弹簧圈(2)、硅胶片(3)、上弹簧支撑架(4)、钢丝绳(5)、第二弹簧圈(6)、下弹簧支撑架(7)、定位环(8)、滑轮(9)、托盘(10)、端盖(11)、旋转套筒(12)、从动齿轮(13)、外壳(14)和主轴(20),所述托盘(10)固定在主轴(20)上;所述托盘(10)上表面边缘设置有定位环(8),下表面边缘设置有滑轮(9),且下表面的滑轮(9)位置与上表面的定位环(8)位置对应;所述硅胶片(3)的下端固定在托盘(10)上,上端固定在第一弹簧圈(2)上;所述硅胶片(3)的中间靠下部位安装有第二弹簧圈(6);所述第一弹簧圈(2)的圆周上设置有辅助爪(1);所述第一弹簧圈(2)的直径与托盘(10)的直径相等,且大于第二弹簧圈(6)的直径;所述旋转套筒(12)通过轴承安装在主轴(20)上;所述从动齿轮(13)与旋转套筒(12)通过键连接;所述上弹簧支撑架(4)和下弹簧支撑架(7)固定在硅胶片(3)的外表面;所述上弹簧支撑架(4)的上端与第一弹簧圈(2)通过铰链连接;所述下弹簧支撑架(7)的下端与托盘(10)通过铰链连接;所述上弹簧支撑架(4)的下端与下弹簧支撑架(7)的上端通过铰链连接,且该铰链固定在第二弹簧圈(6)上;所述端盖(11)加工有中心孔,且沿圆周均匀加工有8个通孔;所述端盖(11)嵌在外壳(14)上;所述主轴(20)穿过端盖(11)的中心孔;所述钢丝绳(5)上端固定在上弹簧支撑架(4)与第一弹簧圈(2)的铰链连接处,下端穿过定位环(8)和滑轮(9)以及端盖(11)上的通孔固定在旋转套筒(12)上。2.根据权利要求1所述的一种柔性机械手,其特征在于,所述外壳(14)由上下两部分对称结构组成;所述从动齿轮(13)和主动齿轮(17)相啮合;所述主动齿轮(17)与主动轴(18)通过键连接;所述主动轴(18)的一端通过深沟球轴承(19)与外壳(14)连接,另一端通过联轴器(16)与旋转气缸(15)连接;所述辅助爪(1)、上弹簧支撑架(4)、钢丝绳(5)、下弹簧支撑架(7)、定位环(8)和滑轮(9)的数量均为8个。
技术总结
本发明涉及机械手技术领域,且公开了一种柔性机械手。主轴穿过端盖上的中心孔与托盘连接;托盘上下表面边缘分别设置有8个定位环和滑轮;硅胶片的上下端分别固定在第一弹簧圈和托盘上,其中间靠下部位安装有第二弹簧圈;旋转套筒安装在主轴上;上弹簧支撑架和下弹簧支撑架固定在硅胶片的外表面;上弹簧支撑架的上端与第一弹簧圈通过铰链连接,下弹簧支撑架的下端与托盘通过铰链连接;上弹簧支撑架的下端与下弹簧支撑架的上端通过铰链连接,且该铰链固定在第二弹簧圈上;钢丝绳上端固定在上弹簧支撑架与第一弹簧圈的铰链连接处,下端固定在旋转套筒上;主动轴与外壳和旋转气缸连接;主动齿轮和从动齿轮相啮合。本发明可抓取外形不规则物体。规则物体。规则物体。
技术研发人员:狄海廷 孙成鑫 童琳
受保护的技术使用者:东北林业大学
技术研发日:2022.09.19
技术公布日:2022/10/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。