技术特征:
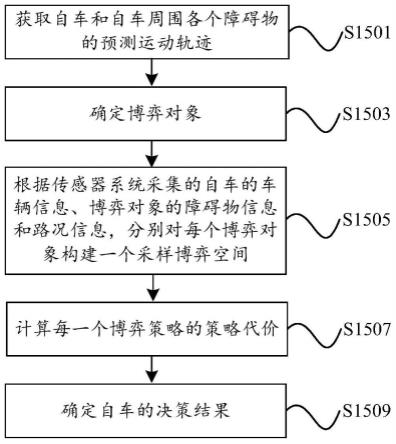
1.一种决策方法,其特征在于,包括:获取自车和自车周围各个障碍物的预测运动轨迹;确定博弈对象,所述博弈对象为所述自车周围各个障碍物中与所述自车的预测运动轨迹相交或与自车之间的距离小于设定阈值的障碍物;根据传感器系统采集的自车的车辆信息、所述博弈对象的障碍物信息和路况信息,分别对每个所述博弈对象构建一个采样博弈空间,每一个采样博弈空间均包括至少一个博弈策略;计算每一个博弈策略的策略代价,所述策略代价为将策略代价的各个因素权重进行加权得到的数值;确定自车的决策结果,所述决策结果为共有采样博弈空间中策略代价最小的博弈策略,所述共有采样博弈空间包括至少一个博弈策略,所述每一个采样博弈空间中均包括所述共有采样博弈空间中的博弈策略。2.根据权利要求1所述的方法,其特征在于,所述确定自车的决策结果,包括:构建所述每一个采样博弈空间的可行域,所述每一个采样博弈空间的可行域为符合设定要求的策略代价对应的至少一个博弈策略;在所有采样博弈空间的可行域交集中,确定出相同博弈策略中策略代价最小的博弈策略。3.根据权利要求1或2所述的方法,其特征在于,所述方法还包括:确定非博弈对象,所述非博弈对象为所述自车周围各个障碍物中与所述自车的预测运动轨迹不相交或与自车之间的距离不小于设定阈值的障碍物;根据传感器系统采集的所述自车的车辆信息、所述非博弈对象的障碍物信息和所述路况信息,构建所述自车的可行域,所述自车的可行域为所述自车在不碰撞所述非博弈对象情况下采取不同决策的至少一个策略;检测到所述自车的决策结果在所述自车的可行域内,输出所述自车的决策结果。4.根据权利要求1-3任意一项所述的方法,其特征在于,所述根据传感器系统采集的自车的车辆信息、所述博弈对象的障碍物信息和路况信息,分别对每个所述博弈对象构建一个采样博弈空间,包括:根据所述自车的车辆信息、所述博弈对象的障碍物信息和所述路况信息,确定所述自车和所述博弈对象中每一个障碍物的决策上限和决策下限;按照设定规则,在所述自车和所述博弈对象中每一个障碍物的决策上限和决策下限中,获取所述自车和所述博弈对象中每一个障碍物的决策策略;将所述自车的决策策略与所述博弈对象中每一个障碍物的决策策略组合,得到自车和所述博弈对象中每一个障碍物的所述至少一个博弈策略。5.根据权利要求1-4任意一项所述的方法,其特征在于,所述方法还包括:根据自车和所述博弈对象与冲突点之间的距离、所述自车和所述博弈对象中每一个障碍物的所述至少一个博弈策略,确定每一个博弈策略的行为标签,所述冲突点为自车与障碍物的预测运动轨迹相交的位置或自车与障碍物之间的距离小于设定阈值的位置,所述行为标签包括自车让行、自车抢行、自车和障碍物均让行中的至少一个。6.根据权利要求1-5任意一项所述的方法,其特征在于,所述计算每一个博弈策略的策
略代价,包括:确定策略代价的各个因素,所述策略代价的各个因素包括安全性、舒适性、通过效率、路权、障碍物的先验概率和历史决策关联性中至少一个;计算每一个策略代价中的每一个因素的因素代价;将所述每一个策略代价中的每一个因素的因素代价进行加权,得到所述每一个博弈策略的策略代价。7.根据权利要求1-6任意一项所述的方法,其特征在于,在所述计算每一个博弈策略的策略代价之后,还包括:比较策略代价中的每一个因素是否在设定范围内;删除包括任意一个不在设定范围内的因素的策略代价对应的博弈策略。8.根据权利要求1-7任意一项所述的方法,其特征在于,所述方法还包括:检测到所述自车的决策结果不在所述自车的可行域内,输出自车让行的决策结果。9.一种决策装置,其特征在于,包括:收发单元,用于获取自车和自车周围各个障碍物的预测运动轨迹;处理单元,用于确定博弈对象,所述博弈对象为所述自车周围各个障碍物中与所述自车的预测运动轨迹相交或与自车之间的距离小于设定阈值的障碍物;根据传感器系统采集的自车的车辆信息、所述博弈对象的障碍物信息和路况信息,分别对每个所述博弈对象构建一个采样博弈空间,每一个采样博弈空间均包括至少一个博弈策略;计算每一个博弈策略的策略代价,所述策略代价为将策略代价的各个因素权重进行加权得到的数值;以及确定自车的决策结果,所述决策结果为共有采样博弈空间中策略代价最小的博弈策略,所述共有采样博弈空间包括至少一个博弈策略,所述每一个采样博弈空间中均包括所述共有采样博弈空间中的博弈策略。10.根据权利要求9所述的装置,其特征在于,所述处理单元,具体用于构建所述每一个采样博弈空间的可行域,所述每一个采样博弈空间的可行域为符合设定要求的策略代价对应的至少一个博弈策略;在所有采样博弈空间的可行域交集中,确定出相同博弈策略中策略代价最小的博弈策略。11.根据权利要求9或10所述的装置,其特征在于,所述处理单元,还用于确定非博弈对象,所述非博弈对象为所述自车周围各个障碍物中与所述自车的预测运动轨迹不相交或与自车之间的距离不小于设定阈值的障碍物;根据传感器系统采集的所述自车的车辆信息、所述非博弈对象的障碍物信息和所述路况信息,构建自车的可行域,所述自车的可行域为所述自车在不碰撞所述非博弈对象情况下采取不同决策的至少一个策略;检测到所述自车的决策结果在所述自车的可行域内,输出所述自车的决策结果。12.根据权利要求9-11任意一项所述的装置,其特征在于,所述处理单元,具体用于根据所述自车的车辆信息、所述博弈对象的障碍物信息和所述路况信息,确定所述自车和所述博弈对象中每一个障碍物的决策上限和决策下限;
按照设定规则,在所述自车和所述博弈对象中每一个障碍物的决策上限和决策下限中,获取所述自车和所述博弈对象中每一个障碍物的决策策略;将所述自车的决策策略与所述博弈对象中每一个障碍物的决策策略组合,得到自车和所述博弈对象中每一个障碍物的所述至少一个博弈策略。13.根据权利要求9-12任意一项所述的装置,其特征在于,所述处理单元,还用于根据自车和所述博弈对象与冲突点之间的距离、所述自车和所述博弈对象中每一个障碍物的所述至少一个博弈策略,确定每一个博弈策略的行为标签,所述冲突点为自车与障碍物的预测运动轨迹相交的位置或自车与障碍物之间的距离小于设定阈值的位置,所述行为标签包括自车让行、自车抢行、自车和障碍物均让行中的至少一个。14.根据权利要求9-13任意一项所述的装置,其特征在于,所述处理单元,具体用于确定策略代价的各个因素,所述策略代价的各个因素包括安全性、舒适性、通过效率、路权、障碍物的先验概率和历史决策关联性中至少一个;计算每一个策略代价中的每一个因素的因素代价;将所述每一个策略代价中的每一个因素的因素代价进行加权,得到所述每一个博弈策略的策略代价。15.根据权利要求9-14任意一项所述的装置,其特征在于,所述处理单元,还用于比较策略代价中的每一个因素是否在设定范围内;删除包括任意一个不在设定范围内的因素的策略代价对应的博弈策略。16.根据权利要求9-15任意一项所述的装置,其特征在于,所述处理单元,还用于检测到所述自车的决策结果不在所述自车的可行域内,输出自车让行的决策结果。17.一种车辆,包括至少一个处理器,所述处理器用于执行存储器中存储的指令,执行如权利要求1-8任一所述的方法。18.一种智能驾驶系统,包括传感器系统和处理器,所述处理器用于执行如权利要求1-8中的任一项所述的方法。19.一种计算机可读存储介质,其上存储有计算机程序,当所述计算机程序在计算机中执行时,令计算机执行权利要求1-8中任一项的所述的方法。20.一种计算设备,包括存储器和处理器,其特征在于,所述存储器中存储有可执行代码,所述处理器执行所述可执行代码时,实现权利要求1-8中任一项所述的方法。21.一种计算机程序产品,其特征在于,所述计算机程序产品存储有指令,所述指令在由计算机执行时,使得所述计算机实施权利要求1-8任意一项所述的方法。
技术总结
本申请提供了一种决策方法、装置和车辆,涉及智能驾驶技术领域。其中,所述方法包括通过获取自车和自车周围的各个障碍的预测运动轨迹,通过判断预测运动轨迹是否相交或两车之间的距离是否小于设定阈值,确定出博弈对象;然后构建自车与各个障碍物之间的采样博弈空间,并计算各个采样博弈空间中的各个博弈策略的策略代价;通过求解各个障碍物采样博弈空间中的共有博弈策略,选择相同博弈策略中策略代价最小的博弈策略作为博弈结果,由于该方案不依赖场景,所以可以适应于所有场景。同时,在博弈过程中,面对多个博弈对象时,通过求解各个采样博弈空间中的共有博弈策略的方式,实现自车可以与多个博弈对象同时进行博弈。车可以与多个博弈对象同时进行博弈。车可以与多个博弈对象同时进行博弈。
技术研发人员:程思源 郝东浩 杨绍宇 王新宇
受保护的技术使用者:华为技术有限公司
技术研发日:2021.04.26
技术公布日:2022/10/27
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。