1.本实用新型属于工业分拣机器人技术领域,具体涉及可以适用于各种尺寸的智能工业分拣机器人。
背景技术:
2.工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。
3.分拣机器人,是一种具备了传感器、物镜和电子光学系统的机器人,可以快速进行货物分拣。
4.目前在工业生产过程中,需要对使用到分拣机器人对货物进行分拣,例如在快递配送站对不同大小的快递箱体进行分拣,从而方便后续的运输环节,现有的分拣机器人在工作过程中不便于依据货物尺寸进行调节,从而难以适应于不同尺寸的货物进行分拣,使用不便。
技术实现要素:
5.本实用新型的目的在于提供可以适用于各种尺寸的智能工业分拣机器人,以解决上述背景技术中提出的问题。
6.为实现上述目的,本实用新型提供如下技术方案为:
7.可以适用于各种尺寸的智能工业分拣机器人,包括一侧可活动对称安装有两组夹持组件的机器人安装板;
8.所述机器人安装板内居中开设有活动槽,且机器人安装板的一端居中可拆卸安装有电动机,所述电动机通过电机轴连接有可旋转安装于活动槽内的螺纹丝杆,所述螺纹丝杆的外缘面上对称构造有一组螺纹旋转方向相反的螺纹齿,所述夹持组件包括螺纹配合安装于螺纹丝杆外缘面上的定位滑块。
9.进一步地,所述定位滑块的一侧构造有u型板,所述u型板远离定位滑块的一面构造有夹持板。
10.进一步地,所述夹持板的一侧对称构造有梯形肋板,所述梯形肋板构造连接于u型板。
11.进一步地,所述夹持板朝向梯形肋板的一面可拆卸安装有气动伸缩杆,所述气动伸缩杆远离夹持板的一端密封固定安装有密封环,所述密封环内密封安装有输气管。
12.进一步地,所述气动伸缩杆的杆件延伸穿出夹持板并构造有用于对货物进行夹持分拣的夹固板,所述夹固板远离夹持板的一面粘接固定有防滑垫。
13.进一步地,所述机器人安装板朝向夹持组件的一面居中可拆卸安装有安装座,所述安装座内固定安装有用于对货物进行扫描成像的雷达成像传感器。
14.与现有技术相比,本实用新型具有如下有益效果:得益于机器人安装板、活动槽、电动机、螺纹丝杆以及定位滑块的设置,在对不同尺寸的货物进行分拣时,可通过启动电动机,使得电动机的电机轴转动带动螺纹丝杆旋转,从而使得螺纹配合安装于螺纹丝杆外缘面上的定位滑块移动,并带动夹持组件整体移动,从而使得两组夹持组件相对移动,从而适应不同尺寸的货物的分拣需要。
附图说明
15.图1为本实用新型的结构示意图;
16.图2为本实用新型夹持组件的结构示意图;
17.图3为本实用新型图1中a处结构的放大示意图。
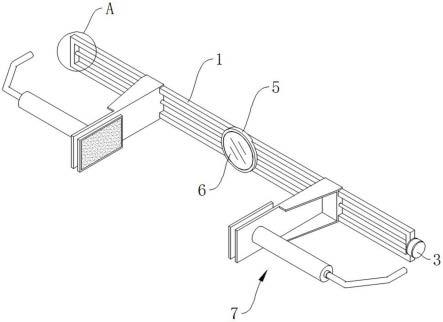
18.图中:1、机器人安装板;2、活动槽;3、电动机;4、螺纹丝杆;5、安装座;6、雷达成像传感器;7、夹持组件;701、定位滑块;702、u型板;703、夹持板;704、梯形肋板;705、气动伸缩杆;706、密封环;707、输气管;708、夹固板。
具体实施方式
19.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面结合具体实施方式,进一步阐述本实用新型。
20.如图1-图3所示,该可以适用于各种尺寸的智能工业分拣机器人,包括一侧可活动对称安装有两组夹持组件7的机器人安装板1,机器人安装板1内居中开设有活动槽2,且机器人安装板1的一端居中可拆卸安装有电动机3,电动机3通过电机轴连接有可旋转安装于活动槽2内的螺纹丝杆4,螺纹丝杆4的外缘面上对称构造有一组螺纹旋转方向相反的螺纹齿,夹持组件7包括螺纹配合安装于螺纹丝杆4外缘面上的定位滑块701,得益于机器人安装板1、活动槽2、电动机3、螺纹丝杆4以及定位滑块701的设置,在对不同尺寸的货物进行分拣时,可通过启动电动机3,使得电动机3的电机轴转动带动螺纹丝杆4旋转,从而使得螺纹配合安装于螺纹丝杆4外缘面上的定位滑块701移动,并带动夹持组件7整体移动,从而使得两组夹持组件7相对移动,从而适应不同尺寸的货物的分拣需要。
21.如图2所示,定位滑块701的一侧构造有u型板702,u型板702远离定位滑块701的一面构造有夹持板703,夹持板703的一侧对称构造有梯形肋板704,梯形肋板704构造连接于u型板702。
22.如图2所示,夹持板703朝向梯形肋板704的一面可拆卸安装有气动伸缩杆705,气动伸缩杆705远离夹持板703的一端密封固定安装有密封环706,密封环706内密封安装有输气管707,气动伸缩杆705的杆件延伸穿出夹持板703并构造有用于对货物进行夹持分拣的夹固板708,夹固板708远离夹持板703的一面粘接固定有防滑垫。
23.如图1所示,机器人安装板1朝向夹持组件7的一面居中可拆卸安装有安装座5,安装座5内固定安装有用于对货物进行扫描成像的雷达成像传感器6,具体实施时,雷达成像传感器6的型号可根据需要自行选取现有技术中的常用型号。
24.工作原理:该可以适用于各种尺寸的智能工业分拣机器人,使用时,通过安装座5中的雷达成像传感器6可对待分拣的货物尺寸形状进行雷达扫描成型,可通过启动电动机3,使得电动机3的电机轴转动带动螺纹丝杆4旋转,从而使得螺纹配合安装于螺纹丝杆4外
缘面上的定位滑块701移动,并带动夹持组件7整体移动,从而使得两组夹持组件7相对移动,接着可启动气动伸缩杆705,使得气动伸缩杆705的杆件伸出,从而推动夹固板708移动,使得夹固板708一侧粘接固定的防滑垫抵压于货物的两侧,从而实现对货物的夹持,该可以适用于各种尺寸的智能工业分拣机器人,结构合理,方便适应不同尺寸的货物的分拣需要进行调节使用,实用性强。
25.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
技术特征:
1.可以适用于各种尺寸的智能工业分拣机器人,包括一侧可活动对称安装有两组夹持组件(7)的机器人安装板(1);其特征在于:所述机器人安装板(1)内居中开设有活动槽(2),且机器人安装板(1)的一端居中可拆卸安装有电动机(3),所述电动机(3)通过电机轴连接有可旋转安装于活动槽(2)内的螺纹丝杆(4),所述螺纹丝杆(4)的外缘面上对称构造有一组螺纹旋转方向相反的螺纹齿,所述夹持组件(7)包括螺纹配合安装于螺纹丝杆(4)外缘面上的定位滑块(701)。2.根据权利要求1所述的可以适用于各种尺寸的智能工业分拣机器人,其特征在于:所述定位滑块(701)的一侧构造有u型板(702),所述u型板(702)远离定位滑块(701)的一面构造有夹持板(703)。3.根据权利要求2所述的可以适用于各种尺寸的智能工业分拣机器人,其特征在于:所述夹持板(703)的一侧对称构造有梯形肋板(704),所述梯形肋板(704)构造连接于u型板(702)。4.根据权利要求3所述的可以适用于各种尺寸的智能工业分拣机器人,其特征在于:所述夹持板(703)朝向梯形肋板(704)的一面可拆卸安装有气动伸缩杆(705),所述气动伸缩杆(705)远离夹持板(703)的一端密封固定安装有密封环(706),所述密封环(706)内密封安装有输气管(707)。5.根据权利要求4所述的可以适用于各种尺寸的智能工业分拣机器人,其特征在于:所述气动伸缩杆(705)的杆件延伸穿出夹持板(703)并构造有用于对货物进行夹持分拣的夹固板(708),所述夹固板(708)远离夹持板(703)的一面粘接固定有防滑垫。6.根据权利要求1所述的可以适用于各种尺寸的智能工业分拣机器人,其特征在于:所述机器人安装板(1)朝向夹持组件(7)的一面居中可拆卸安装有安装座(5),所述安装座(5)内固定安装有用于对货物进行扫描成像的雷达成像传感器(6)。
技术总结
本实用新型公开了可以适用于各种尺寸的智能工业分拣机器人,包括一侧可活动对称安装有两组夹持组件的机器人安装板,所述机器人安装板内居中开设有活动槽,且机器人安装板的一端居中可拆卸安装有电动机,所述电动机通过电机轴连接有可旋转安装于活动槽内的螺纹丝杆,所述螺纹丝杆的外缘面上对称构造有一组螺纹旋转方向相反的螺纹齿,所述夹持组件包括螺纹配合安装于螺纹丝杆外缘面上的定位滑块,所述定位滑块的一侧构造有U型板,所述U型板远离定位滑块的一面构造有夹持板,所述夹持板的一侧对称构造有梯形肋板,该可以适用于各种尺寸的智能工业分拣机器人,结构合理,方便适应不同尺寸的货物的分拣需要进行调节使用,实用性强。强。强。
技术研发人员:邵欣 胡成琳 刘钰婧 李云龙 韩思奇
受保护的技术使用者:天津中德应用技术大学
技术研发日:2022.08.03
技术公布日:2022/10/28
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。