一种磁共振(mr)成像方法和系统
技术领域
1.本技术涉及医学成像领域,特别涉及磁共振(mr)成像方法和系统。
背景技术:
2.磁共振(mr)成像是一种广泛使用的医疗技术。该技术通过利用强大的磁场和射频(rf)技术来扫描对象并得到对象或对象区域的图像。mr(英文全称为magnetic resonance)成像可以实现实时的动态成像,反映对象随时间的运动和/或对比度随时间的变化。
3.在对象的动态成像中,需要通过扫描采集成像数据重建出多维度、多对比度和/或多参数的图像,且磁共振成像中时间分辨率和空间分辨率存在此消彼长的制约关系。在一些实施例中,可以通过在采集图像数据过程中穿插采集导航信号,克服时间分辨率和空间分辨率此消彼长的制约关系。但在一定采集时间范围内,采集的图像数据并非完全有效地用于图像重建,导致图像数据采集时间增加,降低采集效率。
4.因此,亟需提供一种磁共振(mr)成像方法和系统实现动态成像,可以节省数据采集时间,同时提高时间分辨率以及空间分辨率,提高重建图像质量。
技术实现要素:
5.本技术的目的在于提供一种磁共振(mr)成像方法和系统,以通过扫描采集成像数据重建出多维度、多对比度和/或多参数的图像,无需采集导航信号,从而实现高效地采集数据和重建动态图像,节省采集时间。
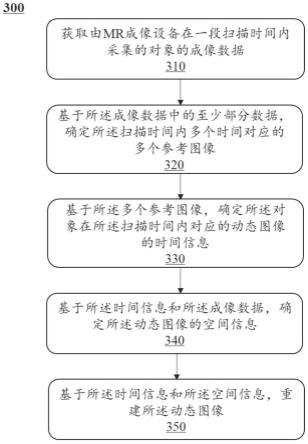
6.本技术实施例之一提供一种磁共振(mr)成像方法,包括:获取由mr成像设备在一段扫描时间内采集的对象的成像数据;基于所述成像数据中的至少部分数据,确定所述扫描时间内多个时间对应的多个参考图像;基于所述多个参考图像,确定所述对象在所述扫描时间内对应的动态图像的时间信息;基于所述时间信息和所述成像数据,确定所述动态图像的空间信息;基于所述时间信息和所述空间信息,重建所述动态图像。
7.在一些实施例中,基于所述成像数据中的至少部分数据,确定所述扫描时间内多个时间对应的多个参考图像可以包括:获取所述成像数据中频率低于频率阈值的第一成像数据;以及基于所述第一成像数据中所述多个时间分别对应的第二成像数据,重建所述多个参考图像。
8.在一些实施例中,基于所述成像数据中的至少部分数据,确定所述扫描时间内多个时间对应的多个参考图像可以包括:获取所述成像数据中位于k空间中心区域的第一成像数据;
9.获取所述成像数据中位于k空间中心区域的第一成像数据;基于所述第一成像数据中所述多个时间,划分期相,得到多个期相对应的多个第二成像数据;以及基于所述多个第二成像数据重建所述多个参考图像。
10.在一些实施例中,基于所述多个参考图像,确定所述对象在所述扫描时间内对应的动态图像的时间信息可以包括:基于所述多个参考图像和所述多个参考图像对应的所述
多个时间顺序,确定图像表示矩阵,所述图像表示矩阵包括空间维度和时间维度,所述空间维度对应所述参考图像中的空间位置,所述时间维度表示所述多个参考图像对应的所述多个时间;以及基于所述图像表示矩阵以及所述时间维度,确定所述时间信息。
11.在一些实施例中,基于所述时间信息和所述成像数据,确定所述动态图像的空间信息可以包括:基于所述时间信息以及所述成像数据确定目标函数;以及通过多次迭代求解所述目标函数值以确定所述空间信息,所述目标函数包括一致项以及正则项,所述一致项用于约束所述成像数据与基于每次迭代中产生的估计空间信息以及所述时间信息确定的估计成像数据之间的差异,所述正则项用于约束所述每次迭代中产生的估计空间信息。
12.在一些实施例中,多个时间中至少一个对应的成像数据的采集轨迹包括:频率低于频率阈值的成像数据采集密度大于频率高于所述频率阈值的成像数据采集密度。
13.在一些实施例中,多个时间中至少两个相邻时间对应的成像数据的采集轨迹之间具有旋转角度。
14.在一些实施例中,基于所述时间信息和所述空间信息,重建所述动态图像可以包括:基于所述时间信息和所述空间信息,得到所述动态图像对应的低秩表示;基于所述低秩表示,确定所述动态图像。
15.本技术实施例之一提供一种磁共振(mr)成像系统,所述系统包括:获取模块,用于获取由mr成像设备在一段扫描时间内采集的对象的成像数据;参考图像确定模块,用于基于所述成像数据中的至少部分数据,确定所述扫描时间内多个时间对应的多个参考图像;时间信息确定模块,用于基于所述多个参考图像,确定所述对象在所述扫描时间内对应的动态图像的时间信息;空间信息确定模块,用于基于所述时间信息和所述成像数据,确定所述动态图像的空间信息;图像重建模块,用于基于所述时间信息和所述空间信息,重建所述动态图像。
16.在一些实施例中,参考图像确定模块还可以用于获取所述成像数据中频率低于频率阈值的第一成像数据;以及基于所述第一成像数据中所述多个时间分别对应的第二成像数据,重建所述多个参考图像。
17.在一些实施例中,参考图像确定模块还可以用于获取所述成像数据中位于k空间中心区域的第一成像数据;基于所述第一成像数据中所述多个时间,划分期相,得到多个期相对应的多个第二成像数据;以及基于所述多个第二成像数据重建所述多个参考图像。
18.在一些实施例中,所述多个时间中至少一个对应的成像数据的采集轨迹包括:频率低于频率阈值的成像数据采集密度大于频率高于所述频率阈值的成像数据采集密度。在一些实施例中,所述多个时间中至少两个相邻时间对应的成像数据的采集轨迹之间具有旋转角度。
19.在一些实施例中,时间信息确定模块还可以用于基于所述多个参考图像和所述多个参考图像对应的所述多个时间顺序,确定图像表示矩阵,所述图像表示矩阵包括空间维度和时间维度,所述空间维度对应所述参考图像中的空间位置,所述时间维度表示所述多个参考图像对应的所述多个时间;以及基于所述图像表示矩阵以及所述时间维度,确定所述时间信息。
20.在一些实施例中,空间信息确定模块还可以用于基于所述时间信息以及所述成像数据确定目标函数;以及通过多次迭代求解所述目标函数值以确定所述空间信息,所述目
标函数包括一致项以及正则项,所述一致项用于约束所述成像数据与基于每次迭代中产生的估计空间信息以及所述时间信息确定的估计成像数据之间的差异,所述正则项用于约束所述每次迭代中产生的估计空间信息。
21.在一些实施例中,图像重建模块还可以用于基于所述时间信息和所述空间信息,得到所述动态图像对应的低秩表示,以及基于所述低秩表示,确定所述动态图像。
22.本技术实施例之一提供一种磁共振(mr)成像装置,所述装置包括至少一个处理器和至少一个存储设备,所述存储设备用于存储指令,当所述至少一个处理器执行所述指令时,实现所述磁共振(mr)成像方法。
23.本技术实施例的磁共振(mr)成像方法和系统可能带来的有益效果包括但不限于:(1)可以在重建对象(例如,心脏等生物体器官)的动态图像时,通过采集的成像数据中的部分数据确定得到时间信息,并基于采集的成像数据和时间信息确定得到空间信息,进而基于时间信息和空间信息重建得到动态图像,实现了mr的动态图像成像过程中,只需采集成像数据,不需额外的其它信息采集,例如,导航信号、运动信息、心跳信息等随时间变化的信息,可以高效地采集数据和重建动态图像,节省采集时间,且采集的成像数据都可以用于重建图像,数据利用率高,有助于高质量的动态图像重建;(2)通过采集的成像数据中的部分数据如频率低于阈值的低频数据或k空间中心区域数据确定得到时间信息,可以降低动态图像重建的运算量,加快图像重建速度,提高图像重建的效率;(3)通过频率低于频率阈值的成像数据部分采集轨迹密集的,频率高于所述频率阈值的成像数据部分采集轨迹稀疏,可以在保证图像重建的质量和效率基础上,进一步提高数据采集的效率。需要说明的是,不同实施例可能产生的有益效果不同,在不同的实施例里,可能产生的有益效果可以是以上任意一种或几种的组合,也可以是其他任何可能获得的有益效果。
附图说明
24.本技术将以示例性实施例的方式进一步说明,这些示例性实施例将通过附图进行详细描述。这些实施例并非限制性的,在这些实施例中,相同的编号表示相同的结构,其中:
25.图1是根据本说明书一些实施例所示的示例性磁共振(mr)成像系统的应用场景示意图:
26.图2是根据本技术的一些实施例所示的示例性磁共振(mr)成像系统的模块图;
27.图3是根据本说明书一些实施例所示的磁共振(mr)成像方法的示例性流程图;
28.图4是根据本说明书一些实施例所示的确定动态图像的时间信息的示例性流程图;
29.图5是根据本说明书一些实施例所示的图像表示矩阵的示例性示意图;
30.图6是根据本说明书一些实施例所示的成像数据的采集轨迹的示例性示意图;
31.图7是根据本说明书一些实施例所示的对象在扫描时间内对应的动态图像的示例性示意图;
32.图8是根据本说明书一些实施例所示的对象在扫描时间内对应的动态图像对应的多维度图像的示例性示意图。
具体实施方式
33.为了更清楚地说明本技术实施例的技术方案,下面将对实施例描述中所需要使用的附图作简单的介绍。显而易见地,下面描述中的附图仅仅是本技术的一些示例或实施例,对于本领域的普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图将本技术应用于其它类似情景。除非从语言环境中显而易见或另做说明,图中相同标号代表相同结构或操作。
34.应当理解,本文使用的“系统”、“装置”、“单元”和/或“模组”是用于区分不同级别的不同组件、元件、部件、部分或装配的一种方法。然而,如果其他词语可实现相同的目的,则可通过其他表达来替换所述词语。
35.如本技术和权利要求书中所示,除非上下文明确提示例外情形,“一”、“一个”、“一种”和/或“该”等词并非特指单数,也可包括复数。一般说来,术语“包括”与“包含”仅提示包括已明确标识的步骤和元素,而这些步骤和元素不构成一个排它性的罗列,方法或者设备也可能包含其它的步骤或元素。
36.本技术中使用了流程图用来说明根据本技术的实施例的系统所执行的操作。应当理解的是,前面或后面操作不一定按照顺序来精确地执行。相反,可以按照倒序或同时处理各个步骤。同时,也可以将其他操作添加到这些过程中,或从这些过程移除某一步或数步操作。
37.在一些实施例中,本技术实施例的磁共振(mr)成像系统和/或磁共振(mr)成像方法可以用于各种生物学或非生物学的磁共振(mr)成像。
38.在一些实施例中,本技术实施例的磁共振(mr)成像系统和/或磁共振(mr)成像方法可以用于心血管磁共振(cmr)定量成像。心血管磁共振(cmr)定量成像可以通过磁共振(mr)成像中采集的测量值(例如心脏中的测量值)来反映或评估心血管的功能和解剖结构情况,以进行诊断和监测生物体如人类或人类心血管疾病动物模型。例如,磁共振(mr)的定量松弛常数t1可以反映或评估心血管纤维化,水肿,炎症等情况。在一些实施例中,被成像的对象存在各种运动(例如心脏和呼吸运动),运动的存在会影响磁共振(mr)成像例如心血管磁共振(cmr)定量成像。
39.在一些实施例中,处理磁共振(mr)成像中涉及的运动如心血管磁共振(cmr)定量成像中涉及的呼吸心跳运动,可以在成像数据采集过程中应用门控从而实现在数据采集过程中运动停止或近似停止,例如应用心电门控,通过屏气和/或短触发采集来令数据采集过程中尽可能多的运动停止或冻结。应用门控的磁共振(mr)成像在数据采集过程中,一次选择一个动态,放弃有关其余动态的有用信息,并且需要在采集触发之间暂停。对于应用门控的磁共振(mr)成像,实现对象的成像(例如标准的心脏成像)需要扫描时间较长而效率低下的扫描序列,其中每个扫描序列都针对不同的动态情况采用了不同的运动冻结机制组合。在一些实施例中,这些运动的冻结机制是不可靠的(例如,ecg触发)或令对象不舒适(例如,屏气),以及多次屏气采集的使用令扫描之间可能未对准,采集的成像数据存在偏差,使图像融合或重建复杂化。除此之外,这种应用门控的磁共振(mr)成像策略不适用于患有心律不齐或屏住呼吸困难的不健康的受试者。
40.通过本技术实施例的磁共振(mr)成像系统和/或磁共振(mr)成像方法,可以实现通过一次扫描采集成像数据,并重建出多维度、多对比度和/或多参数的图像,即可以实现
高效地采集数据和重建动态图像,节省采集时间。且采集的成像数据都可以用于重建图像,数据利用率高,有助于高质量的动态图像重建。在一些实施例中,通过本技术的实施例的磁共振(mr)成像系统和/或磁共振(mr)成像方法,可以避免应用门控的磁共振(mr)成像在数据采集过程中,一次选择一个动态,放弃有关其余动态的有用信息,并且需要在采集触发之间暂停而造成扫描时间较长且效率低下的情况,还可以避免多次屏气采集造成扫描之间未对准,采集的成像数据存在偏差的情况。在一些实施例中,本技术的实施例的磁共振(mr)成像系统和/或磁共振(mr)成像方法,可以适用于各种情况的受试者(包括患有心律不齐或屏住呼吸困难的不健康的受试者)。
41.图1是根据本技术一些实施例所示的示例性磁共振(mr)成像系统的应用场景示意图。
42.在一些实施例中,该磁共振(mr)成像系统可以基于本技术披露的磁共振(mr)成像方法进行成像。
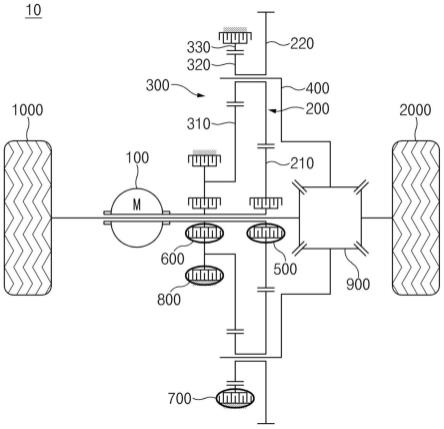
43.如图1所示,磁共振(mr)成像系统100可以包括mr扫描装置110、网络120、终端130、处理设备140以及存储设备150。
44.mr扫描装置110可以包括磁体模块和射频(rf)模块(图1中未示出)。在一些实施例中,mr扫描装置110可对对象或该对象的区域执行扫描。关于对象的更多说明可以参见本说明图3及其相关描述。在一些实施例中,扫描可以是用于校准成像扫描的预扫描。在一些实施例中,扫描可以是用于定位对象或对象区域、识别对象或对象区域的定位扫描。在一些实施例中,扫描可以是用于生成图像的成像扫描。
45.磁体模块可包括主磁场生成器和/或梯度磁场生成器(图1中未示出)。主磁场生成器在扫描期间可创建静态磁场b0。主磁体可以是各种类型的,包括,例如永磁体、超导电磁体、电阻性电磁体等。
46.梯度磁场生成器可在主磁场b0上沿某一方向(例如x、y和/或z方向)生成磁场梯度。如本文中所使用的,x、y和z方向可表示坐标系中的x、y和z轴。仅作为示例,x轴和x轴可在水平面中,x轴和y轴可在垂直面中,x轴可沿机架(gantry)的旋转轴。在一些实施例中,x轴、y轴和z轴可由梯度磁场生成器(即,梯度磁场生成器中的梯度线圈)来指定。梯度磁场可编码和/或读出位于mr扫描装置110内的对象(或该对象的区域)的空间信息。
47.在一些实施例中,磁体模块可在扫描期间生成一组方向上的磁场梯度。仅作为示例,磁体模块可生成第一方向上的第一磁场梯度、第二方向上的第二磁场梯度,以及第三方向上的第三磁场梯度。在一些实施例中,第一、第二和第三方向可分别沿x轴、y轴和x轴。在一些实施例中,沿x轴、y轴和/或x轴的磁场梯度可对应于k空间中的不同编码/读出方向(例如,kx轴的方向、ky轴的方向、kz轴的方向、或任何其他方向)。
48.磁体模块和/或rf模块的功能、大小、类型、几何、位置、量、和/或幅度可根据一个或多个具体条件来确定或改变。仅作为示例,磁体模块和射频(rf)模块可被设计成围绕对象(或该对象的区域)以形成隧道型mr扫描装置110(即,闭孔mr扫描装置110)或开放式mr扫描装置110(即,开孔mr扫描装置110)。在一些实施例中,rf模块可被分类为发射线圈和/或接收线圈。这些rf线圈可向/从对象(或该对象的区域)发射或接收rf信号。仅作为示例,发射线圈可向对象(或该对象的区域)发射rf能量以在感兴趣的区域中感生电信号。作为另一示例,接收线圈可拾取由该对象(或该对象的区域)内部的核驰豫产生的rf电磁辐射。
49.在一些实施例中,根据功能和/或大小的不同,rf线圈可被分类为容积线圈和局部线圈。在一些实施例中,容积线圈可包括体线圈、鸟笼线圈、横向电磁线圈、鞍形线圈等。在本公开的一些实施例中,局部线圈可包括螺线管线圈、鞍形线圈、柔性线圈、表面线圈等。
50.表面线圈可以是直接放置在对象(或该对象的区域)上的线圈。在一些实施例中,表面线圈可以是被配置成接收由对象(或该对象的区域)内部的核驰豫产生的信号的接收线圈。仅作为示例,表面线圈可在预扫描和/或成像扫描期间接收多个mr信号。例如,表面线圈可直接放置在对象的感兴趣区域(roi)上,从而通过限制接收的空间范围来提供改善的信噪比(snr)。在一些实施例中,表面线圈可以是导电材料的环。仅作为示例,表面线圈可以是铜管。在一些实施例中,环可形成各种形状。仅作为示例,可将环弯曲以符合待检查的身体部位。在一些实施例中,射频(rf)模块可包括一个或多个表面线圈。仅作为示例,射频(rf)模块可包括多个表面线圈。
51.体线圈可以是围绕对象(或该对象的区域)的线圈。仅作为示例,体线圈可围绕被检查的患者的头部或膝盖。在一些实施例中,体线圈可以是被配置成接收由对象(或该对象的区域)内部的核驰豫产生的信号的接收线圈,和/或被配置成向对象(或该对象的区域)发射rf能量的发射线圈。仅作为示例,体线圈可在预扫描和/或成像扫描期间接收多个mr信号。
52.在一些实施例中,射频(rf)模块可包括一个或多个接收线圈。线圈可包括表面线圈和/或体线圈。仅作为示例,射频(rf)模块可包括第一接收线圈和第二接收线圈。第一接收线圈和第二接收线圈两者都可以是表面线圈。作为另一示例,第一接收线圈和第二接收线圈两者都可以是体线圈。在一些实施例中,射频(rf)模块可包括一个或多个体线圈。仅作为示例,射频(rf)模块可包括围绕被检查的患者的体线圈。
53.网络120可以包括能够促进磁共振(mr)成像系统100的信息和/或数据交换的任何合适的网络,还可以是医院网络his(hospital information system)或pacs(picture archiving and communication systems)或其他医院网络的一部分或者尽管与his或pacs或其他医院网络独立但连接于其上。在一些实施例中,磁共振(mr)成像系统100的一个或多个组件(例如,mr扫描装置110、终端130、处理设备140、存储设备150等)可以通过网络120与磁共振(mr)成像系统100的一个或多个组件之间交换信息和/或数据。例如,处理设备140可以通过网络120从数据处理计划系统获取计划数据。网络120可以包括公共网络(如互联网)、私人网络(例如,局域网(lan)、广域网(wan))等)、有线网络(如以太网)、无线网络(例如,802.11网络、无线wi-fi网络等)、蜂窝网络(例如,长期演进(lte)网络)、帧中继网络、虚拟专用网络(vpn)、卫星网络、电话网络、路由器、集线器、服务器计算机等其中一种或几种组合。例如,网络120可以包括有线网络、光纤网络、电信网络、局域网、无线局域网(wlan)、城域网(man),公用交换电话网(pstn)、蓝牙
tm
网络,zigbee
tm
网络、近场通信(nfc)网络等其中一种或几种的组合。在一些实施例中,网络120可以包括一个或多个网络接入点。例如,网络120可以包括有线和/或无线网络接入点,例如基站和/或因特网交换点,通过所述接入点,磁共振(mr)成像系统100的一个或多个组件可以连接网络120以交换数据和/或信息。
54.终端130可以包括移动设备131、平板电脑132、笔记本电脑133等或其任意组合。在一些实施例中,终端130可以通过网络与磁共振(mr)成像系统100中的其他组件交互。例如,终端130可以向mr扫描装置110发送一种或多种控制指令以控制mr扫描装置110按照指令进
行扫描。又例如,终端130还可以接收处理设备140的处理结果,例如,2d图像,诸如透视图像,和/或,3d图像,诸如重建中或重建后的图像。在一些实施例中,移动设备131可以包括智能家居装置、可穿戴设备、移动装置、虚拟现实装置、增强现实装置等或其任意组合。在一些实施例中,智能家居装置可以包括智能照明装置、智能电器控制装置、智能监控装置、智能电视、智能摄像机、对讲机等或其任意组合。在一些实施例中,可穿戴设备可以包括手链、鞋袜、眼镜、头盔、手表、衣服、背包、智能附件等或其任意组合。在一些实施例中,移动装置可包括移动电话、个人数字助理(pda)、游戏装置、导航装置、pos装置、笔记本电脑、平板电脑、台式机等或其任意组合。在一些实施例中,该虚拟现实装置和/或增强现实装置可包括虚拟现实头盔、虚拟现实眼镜、虚拟现实补丁、增强现实头盔、增强现实眼镜、增强现实补丁等或其任意组合。例如,该虚拟现实装置和/或增强现实装置可包括google glass
tm
、oculus rift
tm
、hololens
tm
或gear vr
tm
等。在一些实施例中,终端130可以是处理设备140的一部分。
55.在一些实施例中,处理设备140可以处理从mr扫描装置110、终端130和/或存储设备150获得的数据和/或信息。例如,处理设备140可以对部分扫描数据、成像数据(例如,低频部分或k空间中心区域的扫描数据)进行加权处理以确定重建图像所需的数据。又例如,处理设备140可以对扫描数据、成像数据进行数据预处理、图像重建、重建后处理等。在一些实施例中,处理设备140还可以控制mr扫描装置110的扫描动作。例如,处理设备140可控制mri扫描装置110的磁体模块和/或rf模块。仅作为示例,处理设备140可控制x方向、y方向和z方向上的磁场梯度。在一些实施例中,处理设备140可从mri扫描装置110、接收信息或向mri扫描装置110等发送信息。根据一些实施例,处理设备140可从,例如用户接收命令,并且调节磁体模块和/或rf模块,以根据接收到的命令来得到对象(或该对象的区域)的图像。在一些实施例中,处理设备140可处理从rf模块(例如,(诸)表面线圈和/或(诸)体线圈)接收的mr信号,并且基于这些信号来生成一个或多个mr数据集(mr数据集可以包括对mr信号采样得到的多个mr数据)或成像数据(例如,k空间数据集)。仅作为示例,mr信号可被填充到k空间中以生成k空间数据集,k空间数据集可以包括k空间中的部分数据(如k空间中心区域的数据)或所有数据。在一些实施例中,这些信号可由多个接收线圈接收。由相同的接收线圈接收的信号可被填充到相同k空间的多条k空间线中。在一些实施例中,k空间线可以是填充有数据点的数据集的形式。仅通过示例,接收线圈可包括第一接收线圈和第二接收线圈。第一接收线圈对应的k空间可以是第一k空间,第二接收线圈对应的k空间可以是第二k空间。
56.在一些实施例中,处理设备140可以包括单个服务器或服务器组。服务器组可以是集中式的,也可以是分布式的。在一些实施例中,处理设备140可以是本地的或远程的。例如,处理设备140可以通过网络120从mr扫描装置110、终端130和/或存储设备150访问信息和/或数据。又例如,处理设备140可以直接连接mr扫描装置110、终端130和/或存储设备150以访问信息和/或数据。在一些实施例中,处理设备140可以在云平台上实现。例如,云平台可以包括私有云、公共云、混合云、社区云、分布式云、跨云、多云等其中一种或几种的组合。
57.存储设备150可以存储数据(例如,对象的扫描数据、成像数据等)、指令和/或任何其他信息。在一些实施例中,存储设备150可以存储从mr扫描装置110、终端130和/或处理设备140处获得的数据,例如,存储设备150可以存储从mr扫描装置110获得的对象的扫描数据、成像数据。在一些实施例中,存储设备150可以存储处理设备140执行或使用的数据和/
或指令,以执行本技术中描述的示例性方法。例如,存储设备150可以存储对对象扫描的区域的扫描数据、成像数据进行加权处理后获得的数据。又例如,存储设备150还可以存储实时透视的图像数据和/或重建中和/或重建后得到的图像数据。在一些实施例中,存储设备150可包括大容量存储器、可移除存储器、易失性读写存储器、只读存储器(rom)等其中一种或几种的组合。大容量存储可以包括磁盘、光盘、固态硬盘、移动存储等。可移除存储器可以包括闪存驱动器、软盘、光盘、存储卡、zip磁盘、磁带等。易失性读写存储器可以包括随机存取存储器(ram)。ram可以包括动态随机存储器(dram)、双数据率同步动态随机存取存储器(ddr-sdram)、静态随机存取存储器(sram)、可控硅随机存取存储器(t-ram)、零电容随机存取存储器(z-ram)等。rom可以包括掩模只读存储器(mrom)、可编程的只读存储器(prom)、可擦除可编程只读存储器(eprom),电可擦除可编程只读存储器(eeprom)、光盘只读存储器(cd-rom)、数字多功能光盘等。在一些实施例中,存储设备150可以通过本技术中描述的云平台实现。例如,云平台可以包括私有云、公共云、混合云、社区云、分布式云、跨云、多云等其中一种或几种的组合。
58.在一些实施例中,存储设备150可以连接网络120,以与磁共振(mr)成像系统100中的一个或多个组件(例如,处理设备140、终端130等)之间实现通信。磁共振(mr)成像系统100中的一个或多个组件可以通过网络120读取存储设备150中的数据或指令。在一些实施例中,存储设备150可以是处理设备140的一部分,也可以是独立的并与处理设备140直接或间接相连。
59.应当注意,对磁共振(mr)成像系统100的以上描述仅仅是出于解说目的而提供的,而并非旨在限定本公开的范围。对于本领域普通技术人员而言,可在本公开的教导下作出多种变型和修改。例如,可根据具体实现场景来变化或更改磁共振(mr)成像系统100的组装和/或功能。仅作为示例,一些其他组件可被添加到磁共振(mr)成像系统100中,诸如患者定位模块、梯度放大器模块、以及其他设备或模块。要注意,磁共振(mr)成像系统100可以是传统的或单模态医疗系统、或多模态系统,包括例如正电子发射断层扫描磁共振成像(pet-mri)系统、远程医疗mri系统、以及其他系统等等。然而,这些变型和修改并不脱离本公开的范围。
60.图2是根据本技术的一些实施例所示的示例性磁共振(mr)成像系统的模块图。
61.如图2所示,该磁共振(mr)成像200可以包括获取模块210、参考图像确定模块220、时间信息确定模块230、空间信息确定模块240、图像重建模块250。
62.在一些实施例中,获取模块210可以用于获取由mr成像设备在一段扫描时间内采集的对象的成像数据。
63.在一些实施例中,参考图像确定模块220可以用于基于所述成像数据中的至少部分数据,确定所述扫描时间内多个时间对应的多个参考图像。在一些实施例中,参考图像确定模块220还可以用于获取所述成像数据中频率低于频率阈值的第一成像数据;以及基于所述第一成像数据中所述多个时间分别对应的第二成像数据,重建所述多个参考图像。在一些实施例中,参考图像确定模块220还可以用于获取所述成像数据中位于k空间中心区域的第一成像数据;基于所述第一成像数据中所述多个时间,划分期相,得到多个期相对应的多个第二成像数据;以及基于所述多个第二成像数据重建所述多个参考图像。在一些实施例中,所述多个时间中至少一个对应的成像数据的采集轨迹包括:频率低于频率阈值的成
像数据采集密度大于频率高于所述频率阈值的成像数据采集密度。在一些实施例中,所述多个时间中至少两个相邻时间对应的成像数据的采集轨迹之间具有旋转角度。
64.在一些实施例中,时间信息确定模块230可以用于基于所述多个参考图像,确定所述对象在所述扫描时间内对应的动态图像的时间信息。在一些实施例中,时间信息确定模块230还可以用于基于所述多个参考图像和所述多个参考图像对应的所述多个时间顺序,确定图像表示矩阵,所述图像表示矩阵包括空间维度和时间维度,所述空间维度对应所述参考图像中的空间位置,所述时间维度表示所述多个参考图像对应的所述多个时间;以及基于所述图像表示矩阵以及所述时间维度,确定所述时间信息。在一些实施例中,时间信息确定模块230还可以用于基于所述时间维度对所述图像表示矩阵进行奇异值分解,确定所述时间信息。
65.在一些实施例中,空间信息确定模块240可以用于基于所述时间信息和所述成像数据,确定所述动态图像的空间信息。在一些实施例中,空间信息确定模块240还可以用于基于所述时间信息以及所述成像数据确定目标函数;以及通过多次迭代求解所述目标函数值以确定所述空间信息,所述目标函数包括一致项以及正则项,所述一致项用于约束所述成像数据与基于每次迭代中产生的估计空间信息以及所述时间信息确定的估计成像数据之间的差异,所述正则项用于约束所述每次迭代中产生的估计空间信息。
66.在一些实施例中,图像重建模块250可以用于基于所述时间信息和所述空间信息,重建所述动态图像。在一些实施例中,图像重建模块250还可以用于基于所述时间信息和所述空间信息,得到所述动态图像对应的低秩表示,以及基于所述低秩表示,确定所述动态图像。
67.可以理解,对于本领域的技术人员来说,在了解该系统的原理后,可能在不背离这一原理的情况下,对各个模块进行任意组合,或者构成子系统与其他模块连接。例如,图2中披露的获取模块210和参考图像确定模块220可以是由一个模块来实现上述两个模块的功能。又例如,各个模块可以共用一个存储模块,各个模块也可以分别具有各自的存储模块。诸如此类的变形,均在本技术的保护范围之内。
68.图3是根据本说明书一些实施例所示的磁共振(mr)成像方法的示例性流程图。
69.在一些实施例中,方法300可以通过处理逻辑来执行,该处理逻辑可以包括硬件(例如,电路、专用逻辑、可编程逻辑、微代码等)、软件(运行在处理设备上以执行硬件模拟的指令)等或其任意组合。图3所示的磁共振(mr)成像方法300中的一个或多个操作可以通过图1所示的处理设备140实现。例如,方法300可以以指令的形式存储在存储设备150中,并由处理设备140执行调用和/或执行。
70.如图3所示,该磁共振(mr)成像方法300可以包括以下操作。
71.步骤310,获取由mr成像设备在一段扫描时间内采集的对象的成像数据。
72.在一些实施例中,步骤310可以由获取模块210执行。
73.对象是指可以被扫描成像的主体。在一些实施例中,对象可以包括生物学主体,例如,人类、动物、植物等。在一些实施例中,对象可以包括主体的特定部位、器官、组织等。仅以举例来说,对象可以包括心脏、肺、胸膜、血管、肝、脊柱、骨、胰腺、子宫颈、淋巴、甲状腺、脾、肾上腺、唾液腺、皮脂腺、睾丸、胸腺、阴茎、子宫、气管、骨骼肌、平滑肌等。在一些实施例中,对象可以包括非生物学主体,例如模体、人造物体等。
74.磁共振成像设备即mr成像设备是指基于磁共振现象来实现对对象进行扫描成像的设备。例如,mr成像设备可以包括mr扫描装置110,并通过mr扫描装置110对对象执行扫描。关于mr成像设备的更多描述可以参考图1中的详细描述。
75.在一些实施例中,可设置mr成像设备的mr参数以执行扫描。mr参数可涉及mr扫描、脉冲序列、协议选择、信号采集、数据处理、数据存储、数据校准、图像生成等等、或其任何组合。仅作为示例,mr参数可包括图像对比度和/或图像灰度比、感兴趣区域(roi)、切片厚度、成像类型(例如,t1加权成像、t2加权成像、质子密度加权成像等)、自旋回波类型(自旋回波、快速自旋回波(fse)、快速恢复fse、单发fse、梯度重聚回波、具有稳态推移的快速成像等等)、翻转角度值、采集时间(ta)、回波时间(te)、重复时间(tr)、回波串长度(etl)、相位数、激励数(nex)、反相时间、带宽(例如,rf接收机带宽、rf发射机带宽等)等等、或其任何组合。
76.在一些实施例中,基于包括射频脉冲、梯度场和信号采集时刻等mr参数的扫描序列,mr成像设备可以对对象执行扫描。扫描序列可以是,例如自旋回波(se)序列、快速自旋回波(fse)序列、超短回波时间(ute)序列、梯度回波(gre)序列(如二维螺旋损毁梯度回波序列)等。
77.在mr成像设备对对象执行扫描期间,可通过rf线圈(例如,rf接收线圈)采集mr信号(也称为回波信号)。在一些实施例中,可应用各种信号处理方法来处理所采集的mr信号。仅作为示例,这些信号处理方法可包括模数转换、线性拟合、2d傅里叶变换(2d ft)、快速傅里叶变换(fft)、内插算法、网格重排等等、或其任何组合。在一些实施例中,所采集的mr信号可被转换成一组离散数据。该离散数据可被处理以填充到k空间中以生成k空间数据集。其中,k空间是指mr信号的信号空间,可以通过mr的空间编码技术得到,例如,基于梯度磁场对mr信号进行空间编码(可以包括选层、频率编码、相位编码等),得到对应的频率空间,即为k空间。
78.扫描时间是指mr成像设备对对象执行扫描的时间。一段扫描时间是mr成像设备对对象执行连续扫描的一段时间,可以根据实际需求或经验确定。例如,一段扫描时间可以为5s或10s。在一些实施例中,一段扫描时间可以包括多个(例如,10个或20个)采集时间段(或称为采集时间),多个采集时间段可以具有一定的时间(如自然时间)顺序。mr成像设备(例如,rf接收线圈)可以在一段扫描时间内接收到对象在磁场以及rf脉冲作用下产生的多个回波信号(即mr信号)。多个mr信号中的每个mr信号可以对应一个采集时间段或采集时间。mr成像设备的数据采集模块可以采集该采集时间段内对应的mr信号以填充k空间产生k空间数据集。采集时间段可以根据实际需求或经验进行设置,如50ms或60ms。
79.在一些实施例中,成像数据可以包括mr信号、对mr信号进行处理后的数据、k空间数据集等中的一种或多种。
80.成像数据是指用于生成/重建对象的图像的数据。在一些实施例中,一段扫描时间内采集的对象的成像数据可以包括多个扫描周期采集得到的成像数据,多个扫描周期可以具有一定的时间(如自然时间)顺序。在一些实施例中,一个扫描周期可以对应一个采集时间段。在一些实施例中,一个扫描周期的成像数据(如一个期相)对应的成像数据可以对应为一个k空间数据集,一段扫描时间内多个扫描周期的成像数据(如多个期相)对应的成像数据可以对应为多个k空间数据集。
81.一些实施例中,不同扫描周期的成像数据对应的k空间可以不同,例如,对象在一段扫描时间内可以产生运动或结构发生变化,例如心脏跳动使得心脏进行舒张或收缩运动、血管中的血液流动使得血管发生胀大或缩小、肺的呼吸使得肺内部的肺泡等结构发生变化等,对象的运动或结构变化可以令空间位置信息发生变化,在不同扫描周期对象的空间位置信息不同,可以得到不同的k空间。
82.在一些实施例中,基于mr信号可以得到成像数据。在一些实施例中,mr成像设备基于扫描序列对对象执行扫描后,可以对接收到的mr信号进行数据采集并基于一定的数据采集轨迹填充k空间(也可以称为k空间填充轨迹或k空间数据线)。在一些实施例中,每个mr信号或k空间数据集可以对应一条数据采集轨迹。数据采集轨迹可以是螺旋型、直线型、圆型、射线型(即条幅型)等等、或其任何组合。
83.在一些实施例中,成像数据(例如,每个采集时间段对应的成像数据或每个mr信号)的采集轨迹可以是:频率低于频率阈值的成像数据采集密度大于频率高于所述频率阈值的成像数据采集密度(即采集轨迹为变密度采集轨迹)。即对应频率低于频率阈值的成像数据部分,采集轨迹或k空间数据轨迹是密集的,对应频率高于所述频率阈值的成像数据部分,采集轨迹或k空间数据轨迹是相对稀疏的。
84.在一些实施例中,多个时间中至少两个相邻时间对应的成像数据(例如,相邻采集时间段对应的成像数据或相邻的两个mr信号)的采集轨迹之间具有旋转角度。
85.在一些实施例中,可以采用螺旋型的数据采集轨迹,对应采集的成像数据在k空间中的数据填充轨迹为螺旋型。关于数据采集轨迹更多内容可以参见图6及其相关说明。在一些实施例中,mr成像设备的扫描序列可以采用数据采集轨迹可以是螺旋型的扫描序列,示例性的,可以采用二维螺旋损毁梯度回波序列等梯度回波(gre)序列。
86.在一些实施例中,一段扫描时间内的成像数据(如多个k空间数据集)可以被分为多个期相。多个期相中的每个期相的成像数据可以足够用于重建一幅与对象有关的图像。每个期相对应的成像数据可以对应包括一定数量的k空间数据线。在一些实施例中,可以基于一定数量的k空间数据线将成像数据(如多个k空间数据集)分为多个期相。例如,将连续采集得到的2条k空间数据线对应的成像数据作为一个期相。在一些实施例中,一个扫描周期采集得到的成像数据可以对应一个期相。在一些实施例中,期相可以对应运动周期中的一个时间段,例如一个心脏舒张期、一个心脏收缩期等,在一个期相内,对象如心脏等器官可以视为相对静止。
87.在一些实施例中,可以在mr成像设备对对象执行扫描过程中实时获取对象的成像数据。在一些实施例中,采集的对象的成像数据可以存储在存储设备或存储空间中,以及可以从存储设备或存储空间中读取以获得对象的成像数据。
88.在一些实施例中,可以对获取的mr成像设备在一段扫描时间内采集的对象的成像数据进行校准处理。在一些实施例中,校准处理可以是对成像数据的数据采集轨迹或k空间数据轨迹进行校准,避免或降低mr的磁场梯度延迟效应造成数据采集轨迹或k空间数据轨迹产生误差。在一些实施例中,可以通过采用mr成像设备进行预扫描,得到参考k空间数据轨迹,以及可以将mr成像设备对对象进行扫描得到一段扫描时间的成像数据的k空间数据轨迹与用于参考的k空间数据轨迹进行对比,并可以修正/调整对象的成像数据的k空间数据轨迹,以令其与用于参考的k空间数据轨迹吻合。
89.步骤320,基于所述成像数据中的至少部分数据,确定所述扫描时间内多个时间对应的多个参考图像。
90.在一些实施例中,步骤320可以由参考图像确定模块220执行。
91.参考图像是指在生成或重建对象的动态图像过程中,得到的中间图像,参考图像可以是对象的2d图像、3d图像等各种形态的图像。
92.在一些实施例中,一段扫描时间内的多个时间可以对应扫描时间内的多个扫描周期或多个期相,即可以对应多个扫描周期或多个期相的成像数据。在一些实施例中,一个扫描周期或一个期相的成像数据可以对应得到一个参考图像,多个扫描周期或多个期相的成像数据即可以对应多个参考图像。
93.在一些实施例中,参考图像可以基于成像数据重建得到。例如,可以对一个k空间数据集进行重建处理得到对应的图像,即为参考图像。在一些实施例中,重建处理可以是对成像数据,如k空间数据集进行傅里叶变换得到参考图像。在一些实施例中,可以用训练后的神经网络模型处理成像数据(如k空间数据集)输出得到参考图像。在一些实施例中,可以采用图像重建算法(例如,分裂bregman算法、投影邻近点算法等)处理成像数据(如k空间数据集)得到参考图像等方法。在一些实施例中,成像数据是频域空间的数据,对应得到的参考图像是图像域或像素域的图像。
94.在一些实施例中,可以基于成像数据中的部分数据重建得到参考图像。部分数据可以指频率满足要求的部分成像数据或k空间数据中空间位置满足要求的部分成像数据或基于其它算法规则确定的部分成像数据。
95.在一些实施例中,可以基于成像数据中频率低于频率阈值的部分成像数据,重建得到参考图像。频率阈值可以根据实际需求或经验确定,例如,120hz或130hz。又例如0.08hz或者0.09hz。在一些实施例中,频率阈值可以根据被扫描对象对应的磁共振频率范围进行确定。例如,将频率范围中低频部分对应的阈值确定为频率阈值。在一些实施例中,频率低于频率阈值的部分成像数据可以称为第一成像数据。
96.在一些实施例中,可以获取成像数据中频率低于频率阈值的第一成像数据,以及可以基于第一成像数据中多个时间(即多个扫描周期)分别对应的成像数据,重建对应的多个参考图像。在一些实施例中,第一成像数据中一个时间(即一个扫描周期)对应的成像数据可以称为第二成像数据,即可以基于第一成像数据中包括的多个第二成像数据,重建得到对应的多个参考图像。
97.在一些实施例中,可以基于成像数据中位于k空间中心区域的部分成像数据,重建得到参考图像。中心区域可以根据实际需求或经验确定。例如,以k空间中心点为原点,空间坐标中频率对应的值在0到120hz的空间区域为中心区域。可以理解,k空间的中心区域对应的频率低于频率阈值。在一些实施例中,位于k空间中心区域的部分成像数据可以称为第一成像数据。
98.在一些实施例中,可以获取成像数据中位于k空间中心区域的第一成像数据,以及可以基于第一成像数据中多个时间(即多个扫描周期或多个期相)分别对应的成像数据,重建对应的多个参考图像。如前所述,多个时间可以对应多个期相,即可以基于多个时间对第一成像数据进行划分,得到多个期相分别对应的成像数据。在一些实施例中,第一成像数据中一个时间即一个扫描周期或一个期相对应的成像数据可以称为第二成像数据,即可以基
于第一成像数据中包括的多个第二成像数据,重建得到对应的多个参考图像。
99.步骤330,基于所述多个参考图像,确定所述对象在所述扫描时间内对应的动态图像的时间信息。
100.在一些实施例中,步骤330可以由时间信息确定模块230执行。
101.动态图像与时间和空间相关,动态图像可以包括时间信息和空间信息。例如,心脏或一些器官会随着时间运动,即心脏的各个空间位置、心脏的各个结构特性可以随着时间发生变化,其对应的心脏动态图像就与时间和空间相关。动态图像的图像信息中与时间相关的信息(例如,动态图像中各帧图像对应的各个采集时间等)可以称为动态图像的时间信息,与空间相关的信息(例如心脏的结构位置信息、边界位置信息等)可以称为动态图像的空间信息。可以理解,空间信息与时间信息是相关的,例如,心脏的结构位置信息、边界位置信息等可以随着时间发生变化。
102.在一些实施例中,动态图像的时间信息可以包括函数、模型、向量、矩阵、张量等等,或其任意组合。在一些实施例中,动态图像的空间信息可以包括函数、模型、向量、矩阵、张量等等,或其任意组合。
103.在一些实施例中,可以基于多个时间对应的多个参考图像来确定该段扫描时间对象的动态图像的时间信息。参考图像可以是图像域或像素域对应的图像,可以基于多个时间对应的图像域或像素域中的图像数据,确定该段扫描时间对象的动态图像的时间信息。在一些实施例中,可以对多个参考图像进行数据合并、数据分解、数据提取等处理,以提取或确定得到对应的一段扫描时间对象的动态图像的时间信息。在一些实施例中,可以基于多个参考图像确定动态图像的时间信息基础(也可以称为时间基、时间基函数或者时间基模型),并将该动态图像的时间信息基础作为动态图像的时间信息。在一些实施例中,时间信息基础可以包括函数、模型、向量、矩阵、张量等等,或其任意组合。
104.关于确定扫描时间内动态图像的时间信息的更多内容可以参见图4及其相关说明,此处不再赘述。
105.步骤340,基于所述时间信息和所述成像数据,确定所述动态图像的空间信息。
106.在一些实施例中,步骤340可以由空间信息确定模块240执行。
107.如前所述,空间信息与时间信息相关,基于一段扫描时间对象动态图像的时间信息和该段扫描时间对象的成像数据,可以确定该段扫描时间动态图像的空间信息。
108.在一些实施例中,可以基于动态图像的时间信息和该段扫描时间对象的成像数据确定动态图像的空间信息基础(也可以称为空间基、空间基函数或者空间基模型),并将该动态图像的时间信息基础作为动态图像的时间信息。在一些实施例中,空间信息基础可以包括函数、模型、向量、矩阵、张量等等,或其任意组合。
109.在一些实施例中,可以基于确定的时间信息和获取的一段扫描时间的对象的成像数据(如k空间数据集),确定与空间信息相关的目标函数,通过求解该目标函数,可以确定得到空间信息。
110.在一些实施例中,目标函数可以用于计算基于时间信息和估计空间信息得到的估计成像数据与实际获取的成像数据之间的差异,并通过最小化差异求解该目标函数,得到满足条件(例如,基于估计空间信息和确定的时间信息,得到的估计成像数据与实际获取的成像数据之间的差异为0或小于阈值)的估计空间信息,并将其作为动态图像的空间信息。
在一些实施例中,可以基于成像数据(例如,多个时间对应的多个k空间数据集)对目标函数进行多次迭代求解,以得到满足目标的估计空间信息。
111.在一些实施例中,目标函数可以包括一致项,一致项可以用于约束成像数据与基于每次迭代中产生的估计空间信息以及所述时间信息确定的估计成像数据之间的差异,目标函数可以通过一致项约束估计成像数据与实际获取的成像数据之间的差异以求解估计空间信息。
112.在一些实施例中,目标函数可以包括正则项,正则项可以用于约束每次迭代中产生的估计空间信息,即正则项可以稳定在多次迭代求解过程中得到估计空间信息,令多次迭代求解得到的估计空间信息波动变化不会过大而造成数据不准确。在一些实施例中,正则项可以基于估计空间信息确定。例如。可以将估计空间信息进行小波变换的系数的l1范数作为正则项。又例如。可以将估计空间信息的空间维度的总变差作为正则项。再例如,还可以基于其它的正则化算法,例如贝叶斯算法等得到估计空间信息的正则项(也可以称为正则化项或修正项)。
113.示例性地,以f表示目标函数,f可以构建为:其中,u
x
表示估计空间信息,φ表示时间信息,d表示实际获取的对象的成像数据(如k空间数据集)。表示一致项,r(u
x
)表示正则项。
114.步骤350,基于所述时间信息和所述空间信息,重建所述动态图像。
115.在一些实施例中,步骤350可以由图像重建模块250执行。
116.如前所述,动态图像与时间和空间相关,动态图像可以包括时间信息和空间信息。确定得到动态图像的时间信息和空间信息后,可以基于时间信息和空间信息重建所述动态图像。
117.在一些实施例中,可以处理时间信息和空间信息,将时间信息与空间信息关联起来,得到包括时间信息和空间信息的图像数据,进一步基于该图像数据重建得到动态图像。在一些实施例中,可以将时间信息对应的函数、模型、向量、矩阵、张量等与空间信息对应的函数、向量、矩阵、张量等进行相乘等合并运算,得到包括时间信息和空间信息的函数、向量、矩阵、张量等,并基于得到的函数、向量、矩阵、张量等重建得到动态图像。在一些实施例中,可以将时间信息对应的模型与空间信息对应的模型进行合并,得到包括时间信息和空间信息的模型,并基于该模型重建得到动态图像。
118.在一些实施例中,基于确定的时间信息(如动态图像的时间信息基础)和空间信息(如动态图像的空间信息基础),可以得到动态图像对应的低秩表示。动态图像对应的低秩表示可以是函数、模型、向量、矩阵、张量等等,或其任意的组合。
119.在一些实施例中,动态图像可以是指时间序列图像。时间序列图像可以包括在一段扫描时间内连续采集的对象的多幅mr图像。动态图像对应的低秩表示可以表示该动态图像对应的时间序列图像中多个图像之间的相关性是低秩的。多个图像之间的相关性可以包括空间相关性和/或时间相关性。例如,一个扫描周期或一个期相可以对应对象的一个运动周期或变化周期(如,心脏的一个心跳周期),各个扫描周期或各个期相对应的图像中,对象随时间的变化(如对象的体素、像素等随时间的变化)可以是相似的或者相同的。可以理解,
多个图像之间的相关性或相似性可以用低秩表示来表征,基于低秩表示即可以得到动态图像的图像数据(可以是函数、模型、向量、矩阵、张量等等,或其任意的组合),进而重建得到所述动态图像。在一些实施例中,动态图像的低秩表示也可以表示动态图像的一个模态,可以基于该模态重建得到动态图像。
120.在一些实施例中,确定的时间信息和空间信息可以为对应的矩阵,得到的动态图像对应的低秩表示可以为包括时间信息和空间信息的低秩矩阵。例如,动态图像对应的低秩表示a
(1)
为:a
(1)
=u
x
φ其中,矩阵φ为动态图像的时间信息(如动态图像的时间信息基础),矩阵u
x
为动态图像的空间信息(如动态图像的空间信息基础)。
121.在一些实施例中,重建得到的对象的动态图像,也可以称为对象的电影图像(如心脏电影图像),可以反映对象在一段扫描时间内的结构、形态等特征变化情况。例如,心脏在一段扫描时间内的心跳运动情况、心脏舒张期的心脏结构和形态、心脏收缩期的心脏结构和形态、心脏的体素随时间变化的情况、各个位置的像素(如像素值、对比度等)随时间变化的情况等等。如图7所示,分别为心脏的动态图像中心脏舒张期的心脏结构和形态示意图和心脏收缩期的心脏结构和形态示意图。
122.对象的动态图像是与扫描时间对应的动态图像,可以反映对象不同区域或部分的信息在某个维度内的变化情况。维度可以包括图像像素点的空间位置、心跳运动、呼吸运动、反转恢复时间等一个或其任意组合。例如,对象不同区域或部分的信息可以以像素点呈现于图像中,根据图像像素点的空间位置维度,动态图像可以反映对象不同区域或部分的信息在该段扫描时间内随图像像素点的空间位置的变化而变化的情况。又例如,根据呼吸运动维度,动态图像可以反映对象不同区域或部分的信息在该段扫描时间内随呼吸运动的变化而变化的情况。又例如,根据心跳运动维度,动态图像可以反映对象不同区域或部分的信息在该段扫描时间内随心跳运动的变化而变化的情况。在一些实施例中,在一段扫描时间内,心脏的动态图像可以包括图像像素点的空间位置、心跳运动、呼吸运动、反转恢复时间等多个维度。在一些实施例中,可以基于获取的一段扫描时间的对象的成像数据和/或重建的动态图像,得到多个维度对应的动态图像(即多个时间序列图像)。
123.在一些实施例中,可以从获取的一段扫描时间的对象的成像数据和/或动态图像中提取、分解、计算得到多个维度分别对应的信息。在一些实施例中,可以基于训练得到的神经网络模型处理对象的成像数据和/或动态图像的图像数据,得到多个维度分别对应的信息(如空间信息和时间信息)。进一步地,可以基于多个维度分别对应的信息(如空间信息和时间信息),重建得到多个维度对应的多个时间序列图像。如图8所示,分别为心脏的呼吸运动对应维度的时间序列图像中的一个呼吸相位图像示意图、心跳运动对应维度的时间序列图像中的一个心脏相位图像示意图、反转恢复时间对应维度的时间序列图像中的一个反转恢复时间图像示意图。
124.在一些实施例中,可以对动态图像的低秩表示进行分解,得到多个维度分别对应的时间信息和空间信息。
125.在一些实施例中,前述动态图像的时间信息(可以表示为动态图像的时间信息张量或时间因子张量)可以对应为基于一段扫描时间内采集的对象的成像数据中部分空间编
码(也可以称为空间编码的子集)的成像数据(如一段扫描时间内采集的k空间中部分k空间位置的成像数据,也可以称为导航数据),提取得到的时间信息(如时间信息张量或时间因子张量)。其中,部分k空间位置可以对应于用于识别对象运动的相位信息(如心脏相位或呼吸相位中的至少一个)的k空间位置。
126.在一些实施例中,基于部分空间编码的成像数据(如一段扫描时间内采集的k空间中部分k空间位置的成像数据)提取得到时间信息(如时间信息张量或时间因子张量)可以包括:计算表示该部分空间编码的成像数据(如一段扫描时间内采集的k空间中部分k空间位置的成像数据)的张量(也可以称为训练张量),从表示该部分空间编码的成像数据的张量中提取时间信息(如时间信息张量或时间因子张量)。
127.在一些实施例中,多个时间维度对应的多个时间信息可以对应表示为多个时间基础矩阵。在一些实施例中,从表示该部分空间编码的成像数据的张量中提取时间信息(如时间信息张量或时间因子张量)可以包括:将该张量分解为部分空间编码的成像数据对应的空间因子矩阵(也可以称为空间信息矩阵)、核心张量和一个或多个时间基础矩阵,时间因子张量可以基于核心张量和一个或多个时间基准矩阵确定,例如,时间因子张量可以计算为核心张量和一个或多个时间基准矩阵的乘积。其中,一个或多个时间基础矩阵中的每个时间基础矩阵可以对应于不同的时间维度。例如,每个时间维度可以是心脏相位,呼吸相位,采集时间,成像序列参数或计时参数之一。
128.应当注意的是,上述有关流程300的描述仅仅是为了示例和说明,而不限定本技术的适用范围。对于本领域技术人员来说,在本技术的指导下可以对流程300进行各种修正和改变。然而,这些修正和改变仍在本技术的范围之内。
129.图4是根据本说明书一些实施例所示的确定动态图像的时间信息的示例性流程图。
130.在一些实施例中,流程400可以通过处理逻辑来执行,该处理逻辑可以包括硬件(例如,电路、专用逻辑、可编程逻辑、微代码等)、软件(运行在处理设备上以执行硬件模拟的指令)等或其任意组合。图4所示的用于确定对象在扫描时间内对应的动态图像的时间信息的流程400中的一个或多个操作可以通过图1所示的处理设备140实现。例如,流程400可以以指令的形式存储在存储设备150中,并由处理设备140执行调用和/或执行。
131.如图4所示,该确定动态图像的时间信息的流程400可以包括以下操作。
132.步骤410,基于所述多个参考图像和所述多个参考图像对应的所述多个时间顺序,确定图像表示矩阵,所述图像表示矩阵包括空间维度和时间维度,所述空间维度对应所述参考图像中的空间位置,所述时间维度表示所述多个参考图像对应的所述多个时间。
133.在一些实施例中,步骤410可以由时间信息确定模块230执行。
134.在一些实施例中,一个参考图像可以表示为一个向量,基于多个参考对象对应的多个时间的时间顺序,可以将多个参考图像对应的多个向量进行依次排列,得到对应的一个图像表示矩阵。
135.在一些实施例中,可以将一个参考图像表示为一个行向量,将多个参考图像对应的多个行向量沿列方向基于时间顺序进行依次排列,得到一个图像表示矩阵。在一些实施例中,可以将一个参考图像表示为一个列向量,将多个参考图像对应的多个列向量沿行方向基于时间顺序进行依次排列,得到一个图像表示矩阵。
136.以图5为例,图5为示例性的一个图像表示向量的示意图,其中8个列向量分别为[k11,k12...k18,k19]、[k21,k22...k28,k29]、[k31,k32...k38,k39]、[k41,k42...k48,k49]、[k51,k52...k58,k59]、[k61,k62...k68,k69]、[k71,k72...k78,k79]、[k81,k82...k88,k89],8个列向量分别对应8个连续时间t1、t2...t7、t8的参考图像,t1、t2...t7、t8为用于重建参考图像对应的成像数据的扫描时间,如扫描周期或期相。8个列向量在行方向上排列。
[0137]
对于一个参考图像,可以包括m*n个像素,m和n为整数。每一个像素包括像素信息(例如,像素的空间位置、像素值等)。在一些实施例中,可以将包括m*n个像素的参考图像表示为包括m*n个元素的向量,向量中的每一个元素可以对应一个像素的像素信息(如像素的空间位置)。如图5所示,一个参考图像包括9个像素,对应的列向量中包括9个元素,每一个元素对应一个像素的空间位置信息。即在图像表示矩阵中,可以包括多个参考图像的空间位置信息(如像素的空间位置)和时间信息(如多个参考图像分别对应的扫描时间)。
[0138]
可以理解,基于参考图像对应的向量表示和图像表示矩阵的排列方式,图像矩阵的行维度和列维度分别对应多个参考图像的空间维度和时间维度。空间维度对应参考图像中的空间位置信息,时间维度表示多个参考图像的时间信息,即多个参考图像对应的多个时间。如图5所示,8个列向量分别依次对应连续8个时间的参考图像,即在行维度上可以反映出8个参考图像的时间信息,对于一个列向量,每一个元素对应一个像素的空间位置信息,即在列维度上可以反映出一个参考图像的空间位置信息。
[0139]
步骤420,基于所述图像表示矩阵以及所述时间维度,确定所述时间信息。
[0140]
在一些实施例中,步骤420可以由时间信息确定模块230执行。
[0141]
如前所述,图像表示矩阵可以包括多个参考图像的空间信息(如像素的空间位置)和时间信息(如多个参考图像对应的多个时间)。图像矩阵的行维度和列维度分别对应多个参考图像的空间维度和时间维度。
[0142]
在一些实施例中,可以对图像表示矩阵进行矩阵分解,得到时间维度对应的第一矩阵(即表示参考图像时间信息的矩阵)以及得到空间维度对应的第二矩阵(即表示参考图像空间信息的矩阵)。在一些实施例中,分解得到的第一矩阵(即表示参考图像时间信息的矩阵)可以包括多个参考图像的时间信息(如多个参考图像对应的多个时间),第二矩阵(即表示参考图像空间信息的矩阵)可以包括多个参考图像的空间信息(如参考图像中像素的空间位置)。
[0143]
在一些实施例中,可以基于第一矩阵确定动态图像的时间信息。在一些实施例中,可以基于第一矩阵确定动态图像的时间信息基础(也可以称为时间基、时间基函数或者时间基模型),并将该动态图像的时间信息基础作为动态图像的时间信息。在一些实施例中,多个参考图像中各个参考图像对应的时间信息可以是相关的,例如,一个扫描周期或一个期相可以对应对象的一个运动周期或变化周期(如,心脏的一个心跳周期),各个扫描周期或各个期相对应的图像中,对象随时间的变化(如对象的体素、像素等随时间的变化)可以是相似的或者相同的。基于这种时间相关性或相似性,可以确定动态图像的时间基础(如时间基函数或表征时间基础的矩阵),并将其作为动态图像的时间信息。
[0144]
在一些实施例中,可以确定第一矩阵的秩,以及基于第一矩阵的秩确定第一矩阵的一部分作为动态图像的时间基础的表征。在一些实施例中,矩阵的秩可以对矩阵求解得
到。例如,采用初等变换法、高斯消元法等算法求解得到矩阵的秩。在一些实施例中,矩阵的秩对应有取值范围,可以根据经验或实际需求设置,例如,取值范围可以是10~40。以秩为20为例,即将第二矩阵的前20列作为动态图像的时间基础的表征。可以理解,矩阵的秩小于矩阵的列维数。在一些实施例中,矩阵的秩与多个参考图像之间的时间相关性或相似性有关。
[0145]
在一些实施例中,对图像表示矩阵进行矩阵分解可以采用基于时间维度对图像表示矩阵进行奇异值分解的方式,来确定动态图像的时间信息。例如,图像表示矩阵可以表示为г
lr
,通过对其进行奇异值分解,可以得到:γ
lr
=u∑v其中,u和v分别为行维度对应的一个正交矩阵和列维度对应的一个正交矩阵,∑为一个对角矩阵。分解得到的与时间维度对应的正交矩阵,即作为时间维度对应的第一矩阵(即表示时间信息的矩阵)。
[0146]
图6是根据本说明书一些实施例所示的根据本说明书一些实施例所示的成像数据的采集轨迹的示例性示意图。
[0147]
图6中分别示出了8个连续时间t1、t2...t7、t8对应的成像数据的k空间数据轨迹(也即对应数据采集轨迹)。
[0148]
如图6所示,8个连续时间t1、t2
…
t7、t8对应的成像数据的k空间数据轨迹,采用的是螺旋型,γ(k,t1)、γ(k,t2)、γ(k,t3)、γ(k,t4)、γ(k,t5、γ(k,t6)、γ(k,t7)、γ(k,t8)分别为t1、t2...t7、t8对应的成像数据的k空间中心部分数据。该采用的螺旋型是由中心向外密度降低的螺旋型,即在k空间中心部分的k空间数据轨迹密度比k空间周围部分的k空间数据轨迹密度大。
[0149]
在一些实施例中,多个时间中,至少两个相邻时间对应的成像数据的采集轨迹或k空间数据轨迹具有旋转角度。在一些实施例中,可以是多个时间中的部分相邻时间(例如t1、t2...t7、t8中的t4...t8)对应的采集轨迹或k空间数据轨迹具有旋转角度。在一些实施例中,可以是多个时间中的每一个时间都与其相邻时间对应采集轨迹或k空间数据轨迹具有旋转角度。如图6所示,8个连续时间t1、t2...t7、t8对应的成像数据的k空间数据轨迹中,每一个时间都与其相邻时间对应采集轨迹或k空间数据轨迹具有旋转角度。旋转角度可以根据实际需求或经验确定,例如,可以是以k空间为中心旋转137.5
°
或111
°
等。
[0150]
在一些实施例中,基于相邻时间对应的成像数据的采集轨迹或k空间数据轨迹具有旋转角度,可以实现不同时间对应的成像数据能够覆盖到不同空间位置的数据,令k空间数据分布更加均匀。即如图6所示,若将不同时间对应的成像数据(如多个时间对应的多个k空间的k空间数据线)填充到一个k空间中,可以得到一个空间位置覆盖均匀的k空间数据集。
[0151]
应当注意的是,上述图6中的采集轨迹或k空间数据轨迹仅仅是为了示例和说明,而不限定本技术的适用范围。对于本领域技术人员来说,在本技术的指导下可以对预设权重曲线及其确定方法进行各种修正和改变。然而,这些修正和改变仍在本技术的范围之内。
[0152]
本说明书实施例还提供一种装置,包括处理器,所述处理器用于执行前述的磁共振(mr)成像方法。所述磁共振(mr)成像方法可以包括:获取由mr成像设备在一段扫描时间内采集的对象的成像数据;基于所述成像数据中的至少部分数据,确定所述扫描时间内多
个时间对应的多个参考图像;基于所述多个参考图像,确定所述对象在所述扫描时间内对应的动态图像的时间信息;基于所述时间信息和所述成像数据,确定所述动态图像的空间信息;基于所述时间信息和所述空间信息,重建所述动态图像。
[0153]
上文已对基本概念做了描述,对本领域技术人员来说在阅读本详细公开之后十分显然的是,之前的详细公开旨在仅作为示例来给出,而并不构成限定。各种变更、改善和修改可发生且为本领域技术人员所预期,尽管未在本文中明确陈述。这些变更、改善和修改旨在为本公开所建议,并且落入本公开的示例性实施例的精神和范围之内。
[0154]
此外,已使用特定术语来描述本公开的各实施例。例如,术语“一个实施例”、“一实施例”和/或“一些实施例”意味着结合该实施例描述的特定特征、结构或特性被包括在本公开的至少一个实施例中。因此,强调并应领会,在本说明书的各个部分中对“一实施例”或“一个实施例”或“替换实施例”的两个或更多个引述未必全都指向同一实施例。此外,特定的特征、结构或特性在本公开的一个或多个实施例中可被适当地组合。
[0155]
此外,本领域技术人员将领会,本公开的各方面在本文中可以在数个可专利类别或上下文中的任何一者中进行说明和描述,包括任何新的和有用的过程、机器、制造、或物质的组成,或其任何新的和有用的改进。此外,本公开的各方面可采取实施在一个或多个计算机可读介质中的计算机程序产品的形式,该一个或多个计算机可读介质上实施有计算机可读程序代码。
[0156]
计算机可读信号介质可包括被传播的数据信号,其具有被实施在其中(例如,在基带中或作为载波的一部分)的计算机可读程序代码。此类被传播的信号可采取各种形式中的任何形式,包括电磁、光学等等、或其任何合适组合。计算机可读信号介质可以是并非计算机可读存储介质的、并且可以传达、传播、或传输程序以供指令执行系统、装置或设备执行或结合其来执行的任何计算机可读介质。实施在计算机可读信号介质上的程序代码可使用任何恰适的介质来传送,包括无线、有线、光纤电缆、rf等等、或前述的任何合适的组合来传送。
[0157]
用于执行本公开的各方面的操作的计算机程序代码可以用一种或多种编程语言的任何组合来编写,包括面向对象编程语言,诸如java、scala、smalltalk、eiffel、jade、emerald、c 、c#、vb.net、python等等,常规的过程式编程语言,诸如“c”编程语言、visualbasic、fortran2003、perl、cobol2002、php、abap,动态编程语言,诸如python、ruby和groovy,或其他编程语言。程序代码可完全地在用户的计算机上、部分地在用户的计算机上、作为独立软件包、部分地在用户的计算机上且部分地在远程计算机上、或完全地在远程计算机或服务器上执行。在后一场景中,可通过任何类型的网络(包括局域网(lan)或广域网(wan))将远程计算机连接到用户的计算机,或可作出至外部计算机的连接(例如,使用因特网服务提供商通过因特网)或在云计算环境中或被提供作为服务(诸如软件即服务(saas))。
[0158]
此外,处理元素或序列、或使用数字、字母或其他标号的所叙述次序因此并非旨在将所要求保护的过程和方法限定于任何次序,除非可能在权利要求书中指明。尽管以上公开贯穿各种示例讨论了当前被认为是本公开的各种有用实施例的内容,但是应理解,此类细节仅仅是为了该目的,并且所附权利要求书并不被限定于所公开的实施例,而是反之旨在覆盖落在所公开的实施例的精神和范围内的修改和等效布置。例如,尽管以上描述的各
种组件的实现可被实施在硬件设备中,但是它也可被实现为仅软件解决方案——例如,安装在现有服务器或移动设备上。
[0159]
类似地,应当领会,在对本公开的实施例的以上描述中,出于精简本公开以帮助理解各创造性实施例中的一者或多者的目的,各个特征有时被一起编组在单个实施例、附图、或其描述中。然而,这种公开的方法不应被解释为反映所要求保护的主题需要比在每项权利要求中所明确记载的更多特征的意图。相反,创造性的实施例存在于比单个前述公开的实施例的全部特征更少的特征。
[0160]
在一些实施例中,表达用于描述并要求保护本技术的某些实施例的数量或属性的数字应当被理解为在一些实例中由术语“大约”、“近似”或“基本上”来修饰。例如,“大约”、“近似”或“基本上”可指示所描述的值的
±
20%的变化,除非另外声明。因此,在一些实施例中,在书面描述和所附权利要求书中所阐述的数值参数是可取决于力图通过特定实施例而获得的期望属性而改变的近似值。在一些实施例中,应当根据所报告的有效数字的数目并且应用普通的含入技术来解释这些数值参数。尽管阐述本技术的一些实施例的广泛范围的数值范围和参数是近似值,但是在特定示例中阐述的数值是以实践上尽可能精确的方式被报告的。
[0161]
本文引用的每个专利、专利申请、专利申请公开以及其它材料(诸如文章、书籍、说明书、出版物、文献、物品等)在此出于所有目的引用整体并入本文,与上述材料相关联的任何起诉文件历史记录、上述材料中与本文件不一致或相冲突的材料、或上述材料中可能对现在或之后与本文件相关联的权利要求最大保护范围有限定影响的材料除外。作为示例,假如与任何所纳入的材料相关联的术语的描述、定义和/或使用和与本文件相关联的术语的描述、定义和/或使用之间存在任何不一致或冲突,则以本文件中的术语的描述、定义和/或使用为准。
[0162]
最后,应该理解,本文公开的应用的实施例是对本技术的实施例的原理的解说。可以采用的其他修改可以落入本技术的范围内。由此,作为示例而非限制,根据本文的教导可以利用本技术的实施例的替换配置。因此,本技术的实施例并不限于如精确地所示和所描述的那样。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。