技术特征:
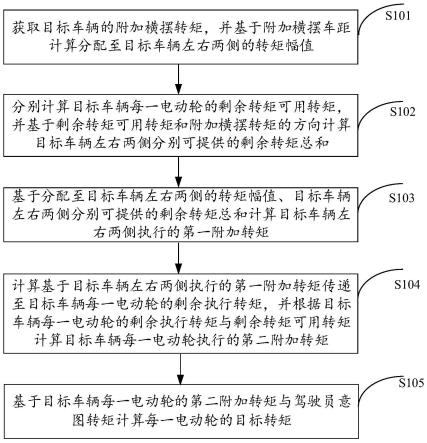
1.一种分布式电动汽车的转矩计算方法,其特征在于,包括:获取目标车辆的附加横摆转矩,并基于所述附加横摆车距计算分配至目标车辆左右两侧的转矩幅值;分别计算目标车辆每一电动轮的剩余转矩可用转矩,并基于所述剩余转矩可用转矩和附加横摆转矩的方向计算目标车辆左右两侧分别可提供的剩余转矩总和;基于所述分配至目标车辆左右两侧的转矩幅值、所述目标车辆左右两侧分别可提供的剩余转矩总和计算目标车辆左右两侧执行的第一附加转矩;计算基于目标车辆左右两侧执行的第一附加转矩传递至目标车辆每一电动轮的剩余执行转矩,并根据目标车辆每一电动轮的剩余执行转矩与剩余转矩可用转矩计算目标车辆每一电动轮执行的第二附加转矩;基于目标车辆每一电动轮的第二附加转矩与驾驶员意图转矩计算每一电动轮的目标转矩。2.根据权利要求1所述的分布式电动汽车的转矩计算方法,其特征在于,所述获取目标车辆的附加横摆转矩,包括:基于目标车辆的横摆角速度和质心侧偏角获取目标车辆的附加横摆转矩;所述基于所述附加横摆车距计算分配至目标车辆左右两侧的转矩幅值,包括:根据所述附加横摆转矩计算目标车辆左右两侧轮毂电机输出转矩的第一差值:其中,δm为目标车辆的附加横摆转矩,r为车轮半径,d为轮距;根据目标车辆左右两侧轮毂电机输出转矩的第一差值计算分配至目标车辆左右两侧的转矩幅值:3.根据权利要求1所述的分布式电动汽车的转矩计算方法,其特征在于,目标车辆每一电动轮的剩余转矩可用转矩包括每一电动轮电机的第一剩余转矩可用转矩与每一电动轮制动卡钳的剩余可用制动转矩;所述分别计算目标车辆每一电动轮的剩余转矩可用转矩,包括:确定每一电动轮内电机的可使用转矩和驾驶员驱动意图转矩,并基于所述可使用转矩和驾驶员驱动意图转矩计算目标车辆每一电动轮电机的第一剩余转矩可用转矩;确定每一电动轮内制动卡钳的可使用制动转矩和驾驶员制动意图转矩,并基于所述可使用制动转矩和驾驶员制动意图转矩计算目标车辆每一电动轮制动卡钳的剩余可用制动转矩。4.根据权利要求1所述的分布式电动汽车的转矩计算方法,其特征在于,目标车辆左右两侧分别可提供的剩余转矩总和包括目标车辆左侧可提供的第一剩余转矩总和及目标车辆右侧可提供的第二剩余转矩总和;所述基于所述剩余转矩可用转矩和附加横摆转矩的方向计算目标车辆左右两侧分别可提供的剩余转矩总和,包括:确定附加横摆转矩方向;根据目标车辆每一电动轮电机的第一剩余转矩可用转矩分别计算目标车辆左右两侧电机的剩余转矩可用转矩总和;
根据目标车辆每一电动轮制动卡钳的剩余可用制动转矩分别计算目标车辆左右侧制动卡钳的剩余可用制动转矩总和;若附加横摆转矩方向为顺时针方向,确定目标车辆左侧可提供的第一剩余转矩总和为目标车辆左侧电机剩余转矩可用转矩总和,确定目标车辆右侧可提供的第二剩余转矩总和为目标车辆右侧电机剩余可用转矩总和与目标车辆右侧制动卡钳剩余可用制动转矩总和的叠加;若附加横摆转矩方向为逆时针方向,确定目标车辆左侧可提供的第一剩余转矩总和为目标车辆左侧电机剩余转矩可用转矩总和与目标车辆左侧制动卡钳剩余可用制动转矩总和的叠加,确定目标车辆右侧可提供的第二剩余转矩总和为目标车辆右侧电机剩余可用转矩总和。5.根据权利要求1所述的分布式电动汽车的转矩计算方法,其特征在于,所述基于所述分配至目标车辆左右两侧的转矩幅值、所述目标车辆左右两侧分别可提供的剩余转矩总和计算目标车辆左右两侧执行的第一附加转矩,包括:确定分配至目标车辆左右两侧的转矩幅值、目标车辆左侧可提供的第一剩余转矩总和与目标车辆右侧可提供的第二剩余转矩总和中的最小值作为目标车辆左右两侧执行的第一附加转矩。6.根据权利要求1所述的分布式电动汽车的转矩计算方法,其特征在于,所述计算基于目标车辆左右两侧执行的第一附加转矩传递至目标车辆每一电动轮的剩余执行转矩包括:计算基于第一附加转矩传递至目标车辆每一电动轮电机的第一剩余执行转矩和传递至目标车辆每一电动轮制动卡钳的第二剩余执行转矩;计算基于第一附加转矩传递至目标车辆每一电动轮电机的第一剩余执行转矩包括:针对目标车辆的每一侧,计算目标车辆在该侧每一电动轮之前电动轮电机对应的第一剩余转矩可用转矩总和,并基于第一附加转矩与第一剩余转矩可用转矩总和的第二差值确定传递至目标车辆该侧每一电动轮电机的第一剩余执行转矩;计算基于第一附加转矩传递至目标车辆每一电动轮制动卡钳的第二剩余执行转矩包括:针对目标车辆的每一侧,计算目标车辆在该侧每一电动轮之前电动轮制动卡钳对应的第二剩余转矩可用转矩总和,并基于第一附加转矩与第一剩余可用转矩总和、第二剩余可用转矩总和的第三差值确定传递至目标车辆该侧每一电动轮制动卡钳的第二剩余执行转矩;目标车辆每一电动轮执行的第二附加转矩包括目标车辆每一电动轮电机执行的第三附加转矩与目标车辆每一电动轮制动卡钳执行的第四附加转矩;所述根据目标车辆每一电动轮的剩余执行转矩所述剩余转矩可用转矩计算目标车辆每一电动轮执行的第二附加转矩,包括:确定目标车辆每一电动轮电机的第一剩余转矩可用转矩与传递至该电动轮第一剩余执行转矩中的较小值为目标车辆每一电动轮电机执行的第三附加转矩;确定目标车辆每一电动轮制动卡钳的剩余可用制动转矩与传递至该电动轮制动卡钳的第二剩余执行转矩中的较小值为目标车辆每一电动轮制动卡钳执行的第四附加转矩。7.根据权利要求1所述的分布式电动汽车的转矩计算方法,其特征在于,每一电动轮的
目标转矩包括每一电动轮电机输出的第一目标转矩和制动卡钳输出的目标制动转矩;所述基于目标车辆每一电动轮的第二附加转矩与驾驶员意图转矩计算每一电动轮的目标转矩,包括:基于目标车辆每一电动轮电机执行的第三附加转矩与驾驶员驱动意图转矩计算每一电动轮电机输出的第一目标转矩;基于每目标车辆每一电动轮制动卡钳执行的第四附加转矩与驾驶员制动意图转矩计算每一电动轮制动卡钳输出的目标制动转矩。8.一种分布式电动汽车的转矩计算装置,其特征在于,包括:转矩幅值计算模块,用于获取目标车辆的附加横摆转矩,并基于所述附加横摆车距计算分配至目标车辆左右两侧的转矩幅值;剩余转矩可用转矩计算模块,用于分别计算目标车辆每一电动轮的剩余转矩可用转矩,并基于所述剩余转矩可用转矩和附加横摆转矩的方向计算目标车辆左右两侧分别可提供的剩余转矩总和;第一附加转矩计算模块,用于基于所述分配至目标车辆左右两侧的转矩幅值、所述目标车辆左右两侧分别可提供的剩余转矩总和计算目标车辆左右两侧执行的第一附加转矩;第二附加转矩计算模块,用于计算基于目标车辆左右两侧执行的第一附加转矩传递至目标车辆每一电动轮的剩余执行转矩,并根据目标车辆每一电动轮的剩余执行转矩与剩余转矩可用转矩计算目标车辆每一电动轮执行的第二附加转矩;目标转矩计算模块,用于基于目标车辆每一电动轮的第二附加转矩与驾驶员意图转矩计算每一电动轮的目标转矩。9.一种电子设备,其特征在于,包括存储器和处理器,其中,所述存储器,用于存储程序;所述处理器,与所述存储器耦合,用于执行所述存储器中存储的所述程序,以实现上述权利要求1至7中任一项所述分布式电动汽车的转矩计算方法中的步骤。10.一种计算机可读存储介质,其特征在于,用于存储计算机可读取的程序或指令,所述程序或指令被处理器执行时,能够实现上述权利要求1至7中任一项所述分布式电动汽车的转矩计算方法中的步骤。
技术总结
本发明涉及一种分布式电动汽车的转矩计算方法、装置、设备及介质,其方法包括:基于附加横摆车距计算分配至目标车辆左右两侧的转矩幅值;基于目标车辆每一电动轮的剩余转矩可用转矩和附加横摆转矩的方向计算目标车辆左右两侧分别可提供的剩余转矩总和;基于分配至目标车辆左右两侧的转矩幅值、目标车辆左右两侧分别可提供的剩余转矩总和计算目标车辆左右两侧执行的第一附加转矩;根据目标车辆每一电动轮的剩余执行转矩与剩余转矩可用转矩计算目标车辆每一电动轮执行的第二附加转矩;基于目标车辆每一电动轮的第二附加转矩与驾驶员意图转矩计算每一电动轮的目标转矩。本发明提高了电动轮的使用寿命,同时极大地提高了车辆的操稳性和安全性。辆的操稳性和安全性。辆的操稳性和安全性。
技术研发人员:熊勇 张伟超 曹宇
受保护的技术使用者:东风越野车有限公司
技术研发日:2022.08.17
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。