技术特征:
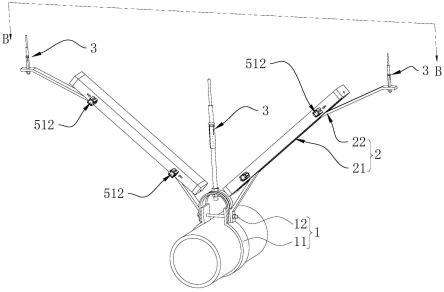
1.一种并联超声机器人,其特征在于,包括:第一平台、第二平台和连接驱动单元,所述第一平台通过所述连接驱动单元与所述第二平台连接,所述第一平台包括用于与定位臂连接的第一连接部,所述第二平台包括用于与超声探头连接的探头夹持单元;所述连接驱动单元包括多个连接驱动部,所述连接驱动部包括电机模块和连杆模块,所述电机模块能沿所述第一平台的周向相对所述第一平台运动,所述连杆模块连接所述电机模块和所述第二平台。2.根据权利要求1所述的并联超声机器人,其特征在于,所述第一平台还包括中心齿轮和齿轮固定板,所述中心齿轮通过所述齿轮固定板连接所述第一连接部,所述电机模块设置在所述中心齿轮的周向。3.根据权利要求2所述的并联超声机器人,其特征在于,所述电机模块包括电机、第一齿轮和第一轴承,所述第一齿轮设置在所述电机的输出轴上,所述第一齿轮与所述中心齿轮啮合,所述第一轴承和所述第一齿轮分别设置在所述中心齿轮的内外圆面上,所述第一轴承连接所述连杆模块。4.根据权利要求3所述的并联超声机器人,其特征在于,所述连杆模块包括连杆、第一铰链和第二铰链,所述连杆两端分别设置所述第一铰链和所述第二铰链,所述第一铰链连接所述第一轴承,所述第二铰链连接所述第二平台。5.根据权利要求3所述的并联超声机器人,其特征在于,所述第一轴承包括上轴承、轴承支撑件和下轴承,所述中心齿轮与第一轴承相接的圆面上包括凸台,所述上轴承通过所述轴承支撑件连接所述下轴承,所述上轴承和所述凸台的上表面相接,所述下轴承和所述凸台的下表面相接。6.根据权利要求3所述的并联超声机器人,其特征在于,所述第一轴承包括上轴承、下轴承和轴承固定板,所述中心齿轮与第一轴承相接的圆面上包括凸台,所述上轴承和所述凸台的上表面相接,所述下轴承和所述凸台的下表面相接,所述轴承固定板用于固定所述第一齿轮和所述上轴承之间的相对位置。7.根据权利要求1至6任一所述的并联超声机器人,其特征在于,所述第一平台上设置手持单元。8.根据权利要求1至6任一所述的并联超声机器人,其特征在于,所述连接驱动单元包括三组,每组包含两个连接驱动部,所述三组连接驱动部相对于所述第一平台对称分布。9.根据权利要求1至6任一所述的并联超声机器人,其特征在于,所述探头夹持单元包括第一夹持件和第二夹持件,所述第一夹持件和第二夹持件用于从两侧夹持所述超声探头。10.根据权利要求1至6所述的并联超声机器人,其特征在于,所述第二平台还包括力传感器、探头固定板和连接件,所述力传感器的下表面与所述探头夹持单元相接,所述连接件连接所述力传感器的上表面和所述探头固定板。11.一种超声诊疗系统,其特征在于,包括:台车、超声探头、手术床和根据权利要求1至10任一所述的并联超声机器人,所述台车设置在手术床的一侧,所述台车上设置有定位臂,所述并联超声机器人通过所述第一连接部设置在所述定位臂上,所述超声探头通过所述探头夹持单元设置在所述并联超声机器人上。
技术总结
本发明涉及超声设备技术领域,提供一种并联超声机器人及超声诊疗系统,并联超声机器人包括:第一平台、第二平台和连接驱动单元,第一平台通过连接驱动单元与第二平台连接,第一平台包括用于与定位臂连接的第一连接部,第二平台包括用于与超声探头连接的探头夹持单元;连接驱动单元包括多个连接驱动部,连接驱动部包括电机模块和连杆模块,电机模块能沿第一平台的周向相对第一平台运动,连杆模块连接电机模块和第二平台。本发明针对现有串联超声机器人体积庞大、结构复杂、刚性差、不方便快速搭建的问题,设计了新型并联构型的机器人,具有结构紧凑、便携、刚性大且安全的优点,适合向超声诊疗系统推广。疗系统推广。疗系统推广。
技术研发人员:侯西龙 邓兆锟 王双翌
受保护的技术使用者:中国科学院香港创新研究院人工智能与机器人创新中心有限公司
技术研发日:2022.08.01
技术公布日:2022/11/8
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。