1.本发明涉及超声设备技术领域,尤其涉及一种并联超声机器人及超声诊疗系统。
背景技术:
2.近年来,随着医疗技术的不断发展,专家医生通过远程操控超声机器人进行超声诊断,实现了医疗资源共享,有效缓解偏远、基层地区资源匮乏的现象。遥操作体外超声机器人是指机器人通过夹持超声探头,利用无线通讯技术,在体外进行近或远距离人体超声检测。
3.现有的遥操作体外超声机器人均采用串联式机器人构型实现探头的定位和控制,而串联式机器人构型具有系统尺寸庞大、造价昂贵、刚性差、不方便运输及快速搭建,在一些探测场景下需要更大范围的探头旋转角度等问题。
技术实现要素:
4.本发明提供一种并联超声机器人及超声诊疗系统,用以解决现有技术中串联机器人的缺陷,提供了一种刚性大、结构紧凑、轴向旋转角度大、便携及成本低的并联机器人,实现了超声诊疗系统的安全使用。
5.本发明提供一种并联超声机器人,包括:第一平台、第二平台和连接驱动单元,所述第一平台通过所述连接驱动单元与所述第二平台连接,所述第一平台包括用于与定位臂连接的第一连接部,所述第二平台包括用于与超声探头连接的探头夹持单元;
6.所述连接驱动单元包括多个连接驱动部,所述连接驱动部包括电机模块和连杆模块,所述电机模块能沿所述第一平台的周向相对所述第一平台运动,所述连杆模块连接所述电机模块和所述第二平台。
7.根据本发明提供的一种并联超声机器人,所述第一平台还包括中心齿轮和齿轮固定板,所述中心齿轮通过所述齿轮固定板连接所述第一连接部,所述电机模块设置在所述中心齿轮的周向。
8.根据本发明提供的一种并联超声机器人,所述电机模块包括电机、第一齿轮和第一轴承,所述第一齿轮设置在所述电机的输出轴上,所述第一齿轮与所述中心齿轮啮合,所述第一轴承和所述第一齿轮分别设置在所述中心齿轮的内外圆面上,所述第一轴承连接所述连杆模块。
9.根据本发明提供的一种并联超声机器人,所述连杆模块包括连杆、第一铰链和第二铰链,所述连杆两端分别设置所述第一铰链和所述第二铰链,所述第一铰链连接所述第一轴承,所述第二铰链连接所述第二平台。
10.根据本发明提供的一种并联超声机器人,所述第一轴承包括上轴承、轴承支撑件和下轴承,所述中心齿轮与第一轴承相接的圆面上包括凸台,所述上轴承通过所述轴承支撑件连接所述下轴承,所述上轴承和所述凸台的上表面相接,所述下轴承和所述凸台的下表面相接。
11.根据本发明提供的一种并联超声机器人,所述第一轴承包括上轴承、下轴承和轴承固定板,所述中心齿轮与第一轴承相接的圆面上包括凸台,所述上轴承和所述凸台的上表面相接,所述下轴承和所述凸台的下表面相接,所述轴承固定板用于固定所述第一齿轮和所述上轴承之间的相对位置。
12.根据本发明提供的一种并联超声机器人,所述第一平台上设置手持单元。
13.根据本发明提供的一种并联超声机器人,所述连接驱动单元包括三组,每组包含两个连接驱动部,所述三组连接驱动部相对于所述第一平台对称分布。
14.根据本发明提供的一种并联超声机器人,所述探头夹持单元包括第一夹持件和第二夹持件,所述第一夹持件和第二夹持件用于从两侧夹持所述超声探头。
15.根据本发明提供的一种并联超声机器人,所述第二平台还包括力传感器、探头固定板和连接件,所述力传感器的下表面与所述探头夹持单元相接,所述连接件连接所述力传感器的上表面和所述探头固定板。
16.本发明还提供一种超声诊疗系统,包括:台车、超声探头、手术床和根据上述任一所述的并联超声机器人,所述台车设置在手术床的一侧,所述台车上设置有定位臂,所述并联超声机器人通过所述第一连接部设置在所述定位臂上,所述超声探头通过所述探头夹持单元设置在所述并联超声机器人上。
17.本发明提供的一种并联超声机器人及超声诊疗系统,基于并联构型的远程超声机器人固定超声探头,相比于传统的串联机器人具有更高的安全性。其通过第一平台、第二平台和连接驱动单元的设置,将多组连接驱动部通过并联的构型连接第一第二平台,并分别控制各自电机使其运动,减少了串联构型的计算误差实现了更精确的控制运动。此外,并联构型还具有客观的经济成本优势和更高的安全性,适宜向超声诊疗系统进行大面积的推广。
附图说明
18.为了更清楚地说明本发明或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作一简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
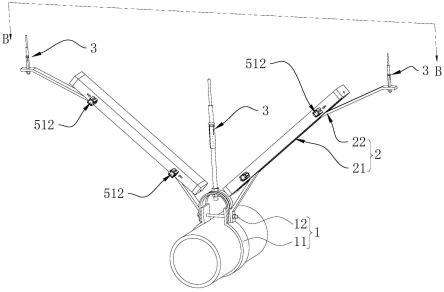
19.图1是本发明实施例提供的并联超声机器人的结构示意图之一;
20.图2是本发明实施例提供的并联超声机器人的结构示意图之二;
21.图3是本发明实施例提供的第二平台的结构示意图;
22.图4是本发明实施例提供的第一平台的结构示意图;
23.图5是本发明实施例提供的电机模块的结构示意图之一;
24.图6是本发明实施例提供的电机模块与中心齿轮的配合示意图;
25.图7是本发明实施例提供的并联超声机器人的位姿示意图;
26.图8是本发明实施例提供的并联超声机器人的末端姿态调整示意图;
27.图9是本发明实施例提供的并联超声机器人的结构示意图之三;
28.图10是本发明实施例提供的电机模块的结构示意图之二;
29.图11是本发明实施例提供的超声诊疗系统的结构示意图。
30.附图标记:
31.1:台车及定位臂;2:并联超声机器人;3:超声探头;4:患者;5:手术床;
32.101:第一平台;102:连接驱动单元;103:第二平台;
33.201:探头夹持单元;202:连杆;203:电机模块;204:中心齿轮;205:齿轮固定板;206:安装固定件;207:把手;
34.2011:第一夹持件;2012:固定板;2013:力传感器;2014:连接件;2015:第二夹持件;
35.2031:电机;2032:电机安装板;2033:固定板;2034:第一齿轮;2035:上轴承盖板;2036:上轴承;2037:轴承支撑件;2038:下轴承;
36.2041:内圆面;2042:凸台;2043:齿轮安装孔;2044:第一铰链;2045:第二铰链;2046:水平固定板;2047:垂直固定板;
37.2061:第一连接部。
具体实施方式
38.为使本发明的目的、技术方案和优点更加清楚,下面将结合本发明中的附图,对本发明中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.超声诊断是将超声检测技术应用于人体,通过测量了解生理或组织结构的数据和形态,发现疾病并做出提示的一种技术。超声诊断是一种无创、无痛、方便、直观的有效检查手段,尤其是b超,应用广泛,影响很大,与x射线、ct、磁共振成像并称为四大医学影像技术。远程体外超声机器人主要用以拓展辅助医生进行超声诊断,在例如需要医生长时间保持特定动作进行超声诊断以及对偏远山区进行超声诊断的场景下,有高应用价值。
40.然而,现有的超声机器人技术方案均采用串联式机器人构型实现探头的定位和控制,一般采用工业级6轴机器人作为探头的定位和控制。这些方案涉及的串联机器人结构具有系统尺寸庞大、造价昂贵、运动空间富余等问题。在这样的背景下,本发明实施例提出了一种并联超声机器人,下面结合图1-图8描述本发明的并联超声机器人,如图1所示,本发明实施例提供了一种并联超声机器人,包括:
41.第一平台101、第二平台103和连接驱动单元102,所述第一平台101通过所述连接驱动单元102与所述第二平台103连接,所述第一平台101包括用于与定位臂连接的第一连接部2061,所述第二平台103包括用于与超声探头3连接的探头夹持单元201;
42.所述连接驱动单元102包括多组连接驱动部,所述连接驱动部包括电机模块和连杆模块,所述电机模块能沿所述第一平台101的周向相对所述第一平台101运动,所述连杆模块连接所述电机模块和所述第二平台103。
43.需要说明的是,本发明实施例中的第一平台用于连接超声诊疗系统的定位臂,而第二平台则连接超声探头,在远程超声诊疗的实际应用时,医生会下达指令控制第一平台的电机模块,通过连接驱动单元,使得第二平台进行移动,方便对病人的探测和诊疗。
44.本发明实施例提供了一种并联超声机器人,将第一平台作为定平台,将第二平台作为动平台,当电机模块工作时,电机模块会带动连杆模块运动,又由于第一平台与第二平
台之间靠多组连接驱动部连接固定,该并联超声机器人可以实现第二平台相对第一平台的多个方向平移和多个方向的姿态调整运动,至此形成一个多自由度的并联机器人构型。并联机器人构型相对比对比文件中的串联继机器人构型具有刚性大、结构紧凑、轴向旋转角度范围大、轻便及成本低等优点,同时还由于电机模块能沿所述第一平台101的周向运动,故可带动连杆模块相对于第一平台进行旋转,最终可以使第二平台夹持的超声探头相对与第一平台实现360
°
的轴向自由度。
45.在本发明的至少一个实施例中,所述第一平台101包括中心齿轮204和齿轮固定板205,所述中心齿轮204通过所述齿轮固定板205连接所述第一连接部2061,所述电机模块设置在所述中心齿轮204的周向。
46.需要说明的是,在本发明实施例中,电机模块可以围绕中心齿轮的周向进行运动,这就代表电机模块会围绕中心齿轮的外圆周进行运动,而由于中心齿轮204通过所述齿轮固定板205连接所述第一连接部2061,故超声诊疗工作时中心齿轮将固定不动,电机工作将会带动电机模块运动,因此工作时电机模块会绕中心齿轮204做圆周运动。
47.如图4所示,本发明实施例中,第一平台主要包含中心齿轮204、齿轮固定板205、安装固定件206。所述齿轮固定板205与所述中心齿轮204固定。所述安装固定件206与所述齿轮固定板205固定。所述安装固定件206上包含第一连接部2061可与台车及定位臂1的末端固定安装。
48.具体的,安装固定件206常由两部分组成,包括平面固定件和第一连接部2061,平面支撑件与齿轮固定板205紧密固定,如图4所示,平面固定件为十字固定件,第一连接部一般设置为凸出部,适应定位臂的接口形状,与诊疗系统中的机械臂或定位臂连接。
49.在本发明的至少一个实施例中,所述第一平台上设置手持单元。
50.需要说明的是,现有方案机器人关节均采用主动式关节,机器人的运动控制均由远端医生操作控制。同时,主动式关节的控制方式会导致诊疗过程中意外事件不能及时处理,有存在误伤患者的可能性,安全性不高。因此,本发明实施例在第一平台上设置手持单元,可以另现场的护士参与进协助远程医生的工作中,手持单元的设置并无限定,可以设置在第一平台上不干涉驱动连接部运动的任何位置。
51.具体的,在本实施例中,手持单元为把手207。参见图2及图4,所述把手207与所述安装固定件206固定。
52.当需要给患者提供超声诊疗时,使用本发明实施例,护士可以通过手持单元将机器人拖拽到合适的位置,远端医生通过要操作控制机器人运动完成目标位置的扫描任务。当机器人故障时患者端的医护人员可以快速将机器人移开患者,避免机器人对患者造成不必要的伤害。因此该技术实现方案具有很好的安全性。
53.在本发明的至少一个实施例中,所述电机模块包括电机2031、第一齿轮2034和第一轴承,所述第一齿轮2034设置在所述电机的输出轴上,所述第一齿轮2034与所述中心齿轮204啮合,所述第一轴承和所述第一齿轮2034分别设置在所述中心齿轮204的内外圆面上,所述第一轴承连接所述连杆模块。
54.需要说明的是,当中心齿轮为外齿轮时,所述第一轴承设置在所述中心齿轮204的内圆面2041上,当中心齿轮为内齿轮时,所述第一轴承设置在所述中心齿轮204的外圆面上。第一齿轮和第一轴承不设置在中心齿轮的同一圆面,分设于中心齿轮的内外侧。在本实
施例中,电机2031连接第一齿轮2034,因此电机输出轴的转动将会传动给第一齿轮带动齿轮旋转,又由于第一齿轮2034和中心齿轮204啮合,因此第一齿轮2034将会带动电机模块203沿着中心齿轮204的周向进行运动。而由于第一轴承与第一齿轮2034连接并设置在中心齿轮204的内圆面2041上,故第一齿轮2034的运动将会带动第一轴承进行相对位置不变的运动。第一轴承连接的连杆202也会在第一齿轮2034的带动下进行运动。
55.如图5所示,为本发明实施例的电机模块示意图,包括:电机2031、电机安装板2032、固定板2033、第一齿轮2034和第一轴承。第一电机2031固定在电机安装板2032上。电机安装板2032与固定板2033通过螺丝相对固定,且可以通过螺丝微调小齿轮和大齿轮得间隙减小齿轮间得间隙,让齿轮啮合更精准。以保证齿轮2034与中心齿轮204的齿相啮合。齿轮2034固定在电机2031的输出轴上,以实现电机输出轴带动第一齿轮2034一起旋转运动。
56.因此,当电机203输出轴转动时,第一齿轮2034会跟着电机轴一起旋转。中心齿轮204固定不动。因此第一齿轮2034带着电机203一起绕中心齿轮204做圆周啮合运动。而电机的运动则会带动连杆模块运动,最终使得第二平台的位置相对第一平台发生改变。
57.在本发明的至少一个实施例中,所述连杆模块包括连杆202、第一铰链2044和第二铰链2045,所述连杆202两端分别设置所述第一铰链2044和所述第二铰链2045,所述第一铰链2044连接所述第一轴承,所述第二铰链2045连接所述第二平台103。
58.需要说明的是,所述第一铰链2044和第二铰链2045用于使连杆的两端均能绕连杆的端部进行多方向的转动,实现多个方向的旋转。具体的,本实施例中第一铰链2044和第二铰链2045均采用万向十字铰链,能够便于端部进行360度的顺畅旋转。
59.在本发明的至少一个实施例中,所述第一轴承包括上轴承2036、轴承支撑件2037和下轴承2038,所述中心齿轮204与第一轴承相接的圆面上包括凸台,所述上轴承2036通过所述轴承支撑件2037连接所述下轴承2038,所述上轴承和所述凸台2042的上表面相接,所述下轴承2038和所述凸台2042的下表面相接,通过上下轴承与凸台的配合实现中心齿轮轴向方向固定。
60.需要说明的是,中心齿轮为外齿轮时,中心齿轮的内圆面2041上设置凸台2042。中心齿轮为内齿轮时,中心齿轮的外圆面上设置凸台。第一轴承的作用是为了方便电机模块带动连杆模块运动,由于传动效应,电机模块的运动误差将会放大至连杆模块处。因此,中心齿轮的内圆面2041上设置了凸台2042,凸台2042的高度与轴承支撑件2037相近,因此将第一轴承安装在凸台2042上,使所述上轴承2036和所述凸台2042的上表面相接,所述下轴承2038和所述凸台2042的下表面相接,能够有效限制电机模块纵向即中心齿轮轴向的位移。
61.另外,为实现凸台的功能,中心齿轮的内圆面2041上也可以设置滑轨,且使得上轴承2036和下轴承2038可以刚好在滑轨内滑动。
62.如图5所示,第一轴承包括还包括上轴承盖板2035、所述上轴承盖板2035设置在上轴承2036上提高稳定性。如图6所示,电机模块与中心齿轮的配合运动时,电机模块单元203与中心齿轮203在上轴承2036和下轴承2038处进行配合。其中,上轴承2036和下轴承2038与中心齿轮的内圆面2041相配合以实现电机模块单元的径向位置移动,并通过中心齿轮内层的凸台2042和第一轴承的配合限制电机模块单元的轴向运动。
63.具体的,中心齿轮204圆周上设置有一系列的齿轮安装孔2043用于将中心齿轮204
与齿轮固定板205连接固定在一起。
64.在本发明的至少一个实施例中,所述第一轴承包括上轴承2036、下轴承2038和轴承固定板,所述中心齿轮与第一轴承相接的圆面上包括凸台2042,所述上轴承2036和所述凸台2042的上表面相接,所述下轴承2038和所述凸台2042的下表面相接,所述轴承固定板用于固定所述第一齿轮和所述上轴承之间的相对位置,通过上下轴承以及轴承固定板与凸台的配合实现中心齿轮轴向方向固定。
65.需要说明的是,在电机模块还可以设置成另一种形式,如图9所示,增加轴承固定板,通过轴承固定板来限位第一轴承。
66.具体的,如图10所示,轴承固定板包括两部分,分别为水平固定板2046和垂直固定板2047,所述水平固定板2046上设置有两个通孔,第一齿轮和上轴承分别可以嵌在各自的通孔内,使得第一齿轮2034和上轴承2036之间的相对位置不变。垂直固定板2047垂直于所述固定板2033,并用于连接水平固定板2046和固定板2033,从而限制电机模块在中心齿轮轴向方向的位置,实现固定。
67.在本发明的至少一个实施例中,所述连接驱动单元包括6组连接驱动部。
68.需要说明的是,机器人完成各个角度的位移和旋转至少需要设置6自由度,因此本实施例设置了6组连接驱动部,具体为:
69.第一平台上设置6组电机模块203且第二平台上设有6组铰链。第一平台与第二平台之间靠6组连杆202连接固定。至此形成一个6自由度的并联机器人构型。该并联机器人可以实现末端相对中心齿轮204的三个方向平移和三个方向的姿态调整运动。由上述描述可以理解当电机203输出轴转动时,第一齿轮2034会跟着电机轴一起旋转。中心齿轮204固定不动。因此第一齿轮2034带着电机203一起绕中心齿轮204做圆周啮合运动。6组电机模块单元203相对独立绕中心齿轮做圆周啮合运动可以实现第二平台203相对中心齿轮204相对运动,其中包括三自由度平移和三个方向的姿态调整,共计6个自由度。
70.本发明实施例的并联超声机器人,相比于传统的串联式工业级6轴机器人作为探头,具有刚性大、结构紧凑、轴向旋转角度大、轻便及成本低等优点。
71.在本发明的至少一个实施例中,所述探头夹持单元201包括第一夹持件2011和第二夹持件2015,所述第一夹持件2011和第二夹持件2015用于从两侧夹持所述超声探头3。
72.需要说明的是,两个夹持件,第一夹持件2011和第二夹持件2015分别位于超声探头3的两侧,且与探头3表面配合。通过螺钉将两个第一夹持件2011拧紧,进而将超声探头3固定住。
73.本发明实施例的并联超声机器人,其探头夹持单元通过第一夹持件2011和第二夹持件2015从两侧夹持,可以适应不同的探头尺寸,对探头规格具有一定普适性,且安装简单,方便拆卸。
74.在本发明的至少一个实施例中,所述第二平台还包括力传感器、探头固定板和连接件,所述力传感器的下表面与所述探头夹持单元相接,所述连接件连接所述力传感器的上表面和所述探头固定板。
75.如图3所示,第二平台包括:第一夹持件2011和第二夹持件2015、固定板2012、力传感器2013、连接件2014。两个探头加持件与力传感器2013的下表面固定。力传感器2013的上表面通过三个对称分布的连接件2014连接固定到固定板2012上。上述探头夹持单元201可
以实现超声探头3的空间固定的同时测量超声探头3末端与患者4体表接触力的大小。固定板2012上还包括孔用于固定第二铰链2045。
76.本发明实施例的并联超声机器人,通过在末端集成的力传感器测量探头与患者体表的接触力来保证超声成像的品质和机器与患者之间的安全性。
77.在本发明的至少一个实施例中,参见图2,本发明实施例提供的并联超声机器人,包括:探头夹持单元201、连杆202、电机模块单元203、中心齿轮204、齿轮固定板205、安装固定件206及把手207。探头夹持单元201为超声探头3提供加持固定作用。探头夹持单元201通过一组连杆202与一组电机模块203连接。所述的连杆202的两端分别固定有铰链。所述电机模块单元203与中心齿轮204可以绕中心齿轮204相对运动。所述齿轮固定板205与所述中心齿轮204固定。所述安装固定件206与所述齿轮固定板205固定。所述把手207与所述安装固定件206固定。
78.本发明实施例的并联超声机器人,采用被动手持辅助方式固定超声探头,相对其他的对比文件中的主动式探头固定方式技术方案具有更高的安全性。另外,本发明实施例的并联超声机器人,由于探头可以绕自身转动360度,因此本实施例中并联超声机器人的轴转自由度较强,更适应于需要大幅度角度变化的人体扫描部位。
79.本发明实施例的并联超声机器人,具有小型便携、高灵活性和多冗余自由度等特点。相比传统构型,该机器人的设计实现了高度机电一体化集成下的人机共融,具有重量轻、柔性强、运动精度高等优点。由于其便携性及安全性,可被灵活部署在社区卫生所、基层医院和移动救护平台,实现远程遥操作下的超声诊断及介入手术导航,服务于基层医疗普惠化需求。
80.如图7和图8所示,展示了不同电机运动下的并联超声机器人末端相对于中心齿轮204的具有不同的相对位姿,体现了并联超声机器人的多种探测姿态。
81.本发明实施例还公开了一种超声诊疗系统,包括:台车、超声探头、手术床和根据上述实施例任一所述的并联超声机器人,所述台车设置在手术床的一侧,所述台车上设置有定位臂,所述并联超声机器人通过所述第一连接部设置在所述定位臂上,所述超声探头通过所述探头夹持单元设置在所述并联超声机器人上。
82.如图10所示,具体的,远程超声机器人主要包括以下几个组成部分:台车及定位臂1、并联超声机器人2、超声探头3和手术床5。台车及定位臂1可以方便对整个机器人系统进行初始三维定位和方便机器人在手术间的摆放和布置。并联超声机器人2固定在台车及定位臂1的末端,因此依靠台车及定位臂1完成末端超声探头3在患者体表的初始固定。超声探头3固定在并联超声机器人2的末端,依靠并联超声机器人2实现探头在患者4体表的检查扫描。上述超声探头3和并联超声机器人2以及并联超声机器人2和台车及定位臂1之间可实现快速拆装。
83.本发明实施例中的超声诊疗系统,工作过程如下:首先护士确认超声诊疗的范围,将台车及定位臂1移动至适当位置,然后医生通过远程影像反馈实时获知患者的探测情况,远程操纵并联超声机器人2进行探测,护士会依据医生指示和现场情况随时对并联超声机器人2进行辅助移动直至探测结束。
84.本发明实施例中的超声诊疗系统,实现了探头的被动式大范围定位及主动式小范围控制的方式,由远端医生通过遥操作对机器人控制以及探头和患者体表接触实现末端探
头小范围扫描诊疗任务。兼顾了超声扫描面积小、扫描结果受体表接触力影响较大等特点,同时考虑了诊疗过程中的安全性和医护人员的身体疲劳工作量等问题。
85.在本发明的至少一个实施例中,所述第一平台还包括中心齿轮和齿轮固定板,所述中心齿轮通过所述齿轮固定板连接所述第一连接部,所述电机模块设置在所述中心齿轮的周向。
86.在本发明的至少一个实施例中,所述电机模块包括电机、第一齿轮和第一轴承,所述第一齿轮设置在所述电机的输出轴上,所述第一齿轮与所述中心齿轮啮合,所述第一轴承和所述第一齿轮分别设置在所述中心齿轮的内外圆面上所述第一轴承连接所述连杆模块。
87.在本发明的至少一个实施例中,所述连杆模块包括连杆、第一铰链和第二铰链,所述连杆两端分别设置所述第一铰链和所述第二铰链,所述第一铰链连接所述第一轴承,所述第二铰链连接所述第二平台。
88.在本发明的至少一个实施例中,所述第一轴承包括上轴承、轴承支撑件和下轴承,所述中心齿轮与第一轴承相接的圆面上包括凸台,所述上轴承通过所述轴承支撑件连接所述下轴承,所述上轴承和所述凸台的上表面相接,所述下轴承和所述凸台的下表面相接。
89.在本发明的至少一个实施例中,所述第一轴承包括上轴承、下轴承和轴承固定板,所述中心齿轮与第一轴承相接的圆面上包括凸台,所述上轴承和所述凸台的上表面相接,所述下轴承和所述凸台的下表面相接,所述轴承固定板用于固定所述第一齿轮和所述上轴承之间的相对位置。
90.在本发明的至少一个实施例中,所述第一平台上设置手持单元。
91.在本发明的至少一个实施例中,所述连接驱动单元包括三组,每组包含两个连接驱动部,所述三组连接驱动部相对于所述第一平台对称分布。
92.在本发明的至少一个实施例中,所述探头夹持单元包括第一夹持件和第二夹持件,所述第一夹持件和第二夹持件用于从两侧夹持所述超声探头。
93.在本发明的至少一个实施例中,所述第二平台还包括力传感器、探头固定板和连接件,所述力传感器的下表面与所述探头夹持单元相接,所述连接件连接所述力传感器的上表面和所述探头固定板。
94.最后应说明的是:以上实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的精神和范围。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。