1.本发明涉及的是一种电力系统故障诊断领域的技术,具体是一种采用数字孪生模型的同步调相机故障诊断方法。
背景技术:
2.目前常见的监测与诊断方法采用智能算法从历史数据中提取故障特征,通过对比实时数据特征实现故障诊断与定位。同步调相机系统规模更大,设备更多,故障机理模型的建立十分复杂。已有故障诊断方法难以全面评估同步调相机的故障特性,并且极度依赖调相机的故障历史数据,对机理模型的依赖性也当前的方法难以适应不同工况下监测与诊断的需求。现有基于数字孪生技术的电机故障检测技术仅对转矩角进行监测,缺乏对于同步调相机更全面的运行状态描述;历史运行数据无法保存,只能通过当下状态进行故障判断,故障判断阈值难以选择;运算速度难以得到保证,缺乏物理采样数据丢失或错误时的保障机制。
技术实现要素:
3.本发明针对现有技术存在的上述不足,提出一种采用数字孪生模型的同步调相机故障诊断方法,通过建立同步调相机及其所在网络的数字孪生模型,建立数据通路保障数据的采样、规约、使用及储存,建立层次化存储架构保存生命周期数据,使用开源仿真包andes建立物理演算逻辑。实际使用过程中,首先基于设备属性及网络架构搭建数字孪生模型,连接实际系统中的采样监测实体至数字平台,其次通过采样初态运行数字孪生物理演算程序,建立实时仿真的数字孪生体,接着实时分析数字孪生体演算指标与实际物理采样数据间的差异,通过历史运行数据选择故障判断阈值,最后通过阈值判断同步调相机是否产生故障,并在故障时发出报警。
4.本发明是通过以下技术方案实现的:
5.本发明涉及一种采用数字孪生模型的同步调相机故障诊断方法,通过建立同步调相机数字孪生模型以模拟不同状态下调相机的故障特征,通过规则式判别系统得到不同类型故障与同步调相机之间复杂的关联关系,实现对故障设备与故障位置的精确诊断。
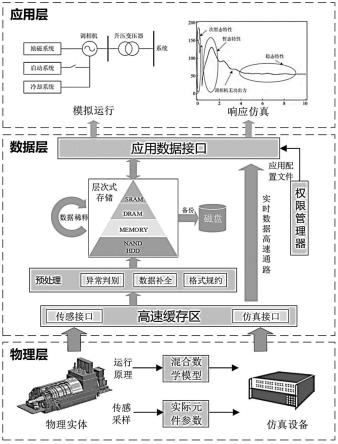
6.所述的同步调相机数字孪生模型包括:物理层、数据层和应用层,其中:物理层为实际部署在电网中运行的同步调相机与模型仿真设备,通过传感采集和实时仿真为上层应用提供多源异构的大量数据;数据层进行数据及数据流管理,完成实时数据的收集与存储,并向应用层提供所需数据;应用层根据实际运行需求进行运行方式模拟及故障下特性仿真。技术效果
7.本发明通过数据通路、数据存储及仿真演算的构成方式搭建数字孪生体,将数字孪生体演算结果视为实际系统正常运行状态下的基准值,进行同步调相机故障诊断。本发明能够根据历史运行数据为故障判断阈值提供选择基础;通过判断各运行指标的变动方
式,可对故障类型进行判断;通过数据通路能够更快地对故障进行响应。
附图说明
8.图1为本发明同步调相机数字孪生架构示意图;
9.图2为励磁器模型示意图。
具体实施方式
10.本实施例涉及一种采用数字孪生模型的同步调相机故障诊断方法,通过建立同步调相机数字孪生模型以模拟不同状态下调相机的故障特征,通过规则式判别系统得到不同类型故障与同步调相机之间复杂的关联关系,实现对故障设备与故障位置的精确诊断。
11.如图1所示,所述的同步调相机数字孪生模型包括:物理层、数据层和应用层,其中:物理层为实际部署在电网中运行的同步调相机与模型仿真设备,通过传感采集和实时仿真为上层应用提供多源异构的大量数据;数据层进行数据及数据流管理,完成实时数据的收集与存储,并向应用层提供所需数据;应用层根据实际运行需求进行运行方式模拟及故障下特性仿真。
12.所述的数据层与物理层间的接口使用高速缓存完成,以提高数据吞吐量。通过数据直连的快速通路连接高速缓存和应用层,为实时仿真提供基础。
13.所述的数据层通过层次化存储方案,在提高数据存储量的同时节省成本。定期对数据进行稀疏,避免数据存储溢出。
14.所述的物理层包括:同步调相机单元、采样单元及仿真设备单元,其中:同步调相机按照锁设置参数进行运行,采样单元根据实际同步调相机运行状态进行采样,得到状态检测量,仿真设备单元根据同步调相机参数及运行状态检测量,进行数字孪生仿真,得到数字孪生体仿真数据。
15.所述的数据层包括:高速缓存区单元、预处理单元、数据存储单元、应用数据接口单元和权限管理器单元,其中:高速缓存区单元接收物理层采样单元实际采样数据及仿真设备单元的数字孪生体仿真数据,并传递至预处理单元,预处理单元对实际采样数据进行异常判别、数据补全及格式规约,得到置信的采样数据,数据存储单元对预处理后的数据进行层次化存储,高使用频率的数据存储在访问速度更快的物理存储介质内,权限管理单元对实际应用的数据访问权限进行管理,应用数据接口单元在接到应用数据请求后,通过权限管理单元进行权限检查,检查通过后从层次式存储单元内取数据传递给应用。
16.所述的数据存储单元中设有同步调相机模型,由同步机模型与励磁器模型,其中:同步机模型具体为具有二次饱和特性的同步机模型,其动态方程为:其中:δ为同步调相机功角,ω为同步调相机转速,h为同步调相机惯性系数,p
mech
为同步调相机机械功率,d为同步调相机阻尼系数,t
e胰ec
为同步调相机电磁转矩;励磁器模型为如图2所示的exdc2模型(《用于电力系统稳定性研究的励磁系统模型》i.c.report,"excitation system models for power system stability studies,"in ieee transactions on powerapparatus and systems,vol.pas-100,no.2,pp.494-509,feb.1981)。
17.所述的应用层包括:模拟运行单元及仿真响应单元,模拟运行单元根据实际设备参数及运行初态,对未来一定时间段内的运行数据进行预演,得到预演数据,仿真响应单元通过模拟不同状态下调相机的故障特征,对系统内置的参数变动及故障事件进行响应,模拟出对应事件下的同步调相机运行状态变化,得到仿真响应数据。
18.所述的模拟不同状态下调相机的故障特征是指:将同步调相机数字孪生模型在不同状态下的运行数据建立为矩阵x,用卡尔曼滤波器描述离散过程:xk=ax
k-1
bu
k-1
wk,其中:观测变量z,得到量测方程:zk=hxk vk。对比数字孪生模型模拟出的信号与实际信号,存在随机噪音偏差,因此在数字孪生模型的运行数据中加入噪音偏差值wk与vk,wk与vk满足:p(w)~n(0,q),p(v)~n(0,r)。
19.所述的不同类型故障与同步调相机之间复杂的关联关系,通过以下方式得到:经多次仿真后,构造卡尔曼滤波器的表达式:在已知的第k步的以前状态情况下第k步的先验状态估计和已知测量变量zk及其预测之差的线性组合构成已知测量变量zk时第k步的后验状态估计其中:先验估计误差和后验估计误差为其中:先验估计误差和后验估计误差为先验估计误差的协方差为后验估计误差的协方差为pk=e[e
kekt
],测量变量及其预测之差为测量过程的革新或残余。残余反映预测值和实际值之间的不一致程度。残余为零则表明二者完全吻合。此后,根据不同的故障类型,采用if-then形式的规则,设置kk与故障类型f的关联关系:其中:是前置属性的参考矩阵,ak代表手动预设的故障时域曲线,指曲线上第i时刻的故障值。
[0020]
与现有技术相比,本方法通过历史数据建立故障特性库,能判断的故障类型大大提高;通过合理选择故障阈值,故障判断时间大大缩短。
[0021]
上述具体实施可由本领域技术人员在不背离本发明原理和宗旨的前提下以不同的方式对其进行局部调整,本发明的保护范围以权利要求书为准且不由上述具体实施所限,在其范围内的各个实现方案均受本发明之约束。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
