1.本公开涉及扫描技术领域,尤其涉及一种扫描设备及扫描设备的控制方法。
背景技术:
2.在进行激光测绘时,通常是将架站式激光扫描仪固定在需要进行测绘的环境附近,然后控制架站式激光扫描仪进行扫描,完成一次扫描后,将架站式激光扫描仪转移至下一个地点,再次进行扫描,直至将所有环境扫描完成后,通过软件将所有的扫描结果进行拼接,过程繁琐,操作不便。
3.手持式激光扫描设备可直接通过手持方式进行扫描,如此,用户可方便地移动手持式激光扫描设备以完成整个环境的扫描,从而提高操作便捷性。
4.然而,上述手持式激光扫描设备存在着扫描精度差的问题。
技术实现要素:
5.为了解决上述技术问题,本公开提供了一种扫描设备及扫描设备的控制方法。
6.本公开的第一方面,提供一种扫描设备,所述扫描设备包括:主体部,所述主体部包括外壳以及设置于所述外壳内的驱动装置、控制装置和角速度传感器,所述角速度传感器用于检测所述扫描设备的转动角速度信息;扫描装置;转动支架,与所述驱动装置连接,所述驱动装置用于驱动所述转动支架转动,所述转动支架包括支架本体以及设置于所述支架本体上的电连接部,所述扫描装置安装于所述支架本体,且所述扫描装置通过所述电连接部与所述控制装置连接;其中,所述控制装置用于根据所述角速度传感器检测的所述转动角速度信息对所述驱动装置进行控制,以控制所述转动支架的转速。
7.本公开一些实施例中,所述扫描设备还包括:手柄部,所述手柄部与所述主体部可拆卸连接。
8.本公开一些实施例中,所述主体部包括呈夹角设置的第一电路板和第二电路板,所述第一电路板位于所述手柄部的上方,且所述第一电路板与所述手柄部的中轴线垂直,所述第二电路板位于所述第一电路板的一侧,所述角速度传感器设置于所述第一电路板上,所述控制装置设置于所述第二电路板上。
9.本公开一些实施例中,所述外壳包括顶壁、底壁和侧壁,所述第二电路板与所述侧壁固定连接,所述顶壁相对所述手柄部的轴线倾斜设置,所述顶壁上设置有第一开口,所述驱动装置固定于所述顶壁的内侧,所述转动支架经所述第一开口与所述驱动装置连接。
10.本公开一些实施例中,所述侧壁包括第一侧壁、第二侧壁、第三侧壁和第四侧壁,所述第一侧壁与所述第三侧壁相对设置,所述第二侧壁和所述第四侧壁相对设置,所述顶壁、所述第一侧壁、所述第二侧壁、所述第三侧壁以及所述底壁形成为一体结构,所述第二电路板固定于所述第四侧壁上,所述第二电路板的第一表面与所述第四侧壁相对且与所述
第四侧壁之间具有间隔空间,所述间隔空间内设置有散热装置,所述第四侧壁上设置有散热孔,所述控制装置设置于所述第二电路板的背离所述第一表面的第二表面上。
11.本公开一些实施例中,所述扫描设备还包括:彩色相机,所述彩色相机设置于所述外壳上,所述彩色相机与所述控制装置连接;所述控制装置还用于根据所述彩色相机获取的彩色图像信息以及所述扫描装置获取的点云信息,生成彩色点云信息。
12.本公开一些实施例中,所述外壳内设置有支撑结构,所述支撑结构包括呈夹角设置的第一板部和第二板部,所述第一板部与所述手柄部的中轴线垂直,所述第一板部承载所述角速度传感器,所述第二板部与所述第一板部的一侧边相连,所述彩色相机固定于所述第二板部;所述外壳上与所述彩色相机对应的位置设置有第二开口,所述彩色相机的镜头经所述第二开口露出。
13.本公开一些实施例中,所述扫描设备还包括:第一数据接口,与所述控制装置连接,所述第一数据接口用于连接外接设备,以使得所述控制装置通过所述第一数据接口与所述外接设备通信;和/或,第二数据接口,与所述控制装置连接,所述第二数据接口用于连接定位系统;和/或,供电接口,与所述控制装置连接;和/或,无线通信模块,与所述控制装置连接。
14.本公开的第二方面,提供了一种扫描设备的控制方法,所述扫描设备包括驱动装置和扫描装置,所述扫描设备的控制方法包括:获取所述扫描设备的转动角速度信息;基于预设角速度信息以及所述转动角速度信息,确定目标角速度信息;向所述驱动装置发送所述目标角速度信息,以使得所述驱动装置基于所述目标角速度信息驱动所述扫描装置转动。
15.本公开一些实施例中,所述扫描设备的控制方法还包括:获取彩色图像信息和点云信息;确定所述彩色图像信息中的各像素点的位姿信息与所述点云信息中的各点云的映射关系;基于所述彩色图像信息、所述点云信息以及所述映射关系,得到彩色点云信息。
16.本公开的扫描设备中设置有角速度传感器,角速度传感器能够检测扫描设备自身的转动角速度信息,如此,控制装置能够根据角速度传感器检测的扫描设备自身的转动角速度信息来控制扫描装置的转速,以保证扫描装置相对于惯性坐标系始终保持匀速转动,减少或消除扫描设备自身的转动对扫描结果的影响,从而提高扫描设备的扫描精度。
17.应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本文。
附图说明
18.构成本文的一部分的附图用来提供对本文的进一步理解,本文的示意性实施例及
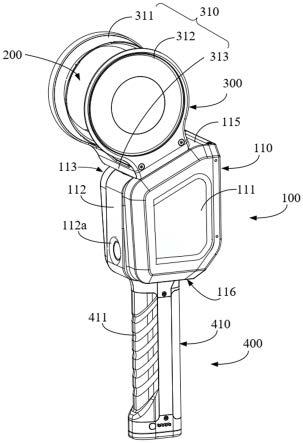
其说明用于解释本文,并不构成对本文的不当限定。在附图中:图1是本公开一示例性实施例提供的扫描设备的结构示意图;图2是本公开一示例性实施例提供的扫描设备的爆炸图;图3是图2中a处的放大图;图4是本公开一示例性实施例提供的扫描设备的剖视图;图5是图4中b处的放大图;图6是图4中c处的放大图;图7是本公开一示例性实施例提供的扫描设备的控制方法流程图;图8是本公开另一示例性实施例提供的扫描设备的控制方法流程图。
19.图中:100、主体部;110、外壳;111、第一侧壁;112、第二侧壁;112a、第二开口;113、第三侧壁;114、第四侧壁;114a、内凹部;114b、盖板;115、顶壁;115a、第一开口;116、底壁;117、凹槽;120、驱动装置;130、控制装置;140、角速度传感器;150、第一电路板;160、第二电路板;170、散热装置;181、滑动件;181a、插入部;182、弹簧;183、操作部;190、支撑结构;191、第一板部;192、第二板部;200、扫描装置;300、转动支架;310、支架本体;311、第一夹持部;312、第二夹持部;313、安装板;320、电连接部;400、手柄部;410、长形壳体;411、防滑纹路;412、环形凸起;420、电池;500、彩色相机。
具体实施方式
20.为使本公开实施例的目的、技术方案和优点更加清楚,下面将结合本公开实施例中的附图,对本公开实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例是本公开一部分实施例,而不是全部的实施例。基于本公开中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本公开保护的范围。需要说明的是,在不冲突的情况下,本公开中的实施例及实施例中的特征可以相互任意组合。
21.相关技术中,手持式的激光扫描设备存在着扫描精度低的问题,为此,申请人发现,在手持式的激光扫描设备进行扫描时,驱动装置例如电机驱动激光扫描设备上的扫描装置匀速转动。然而,由于用户是手持激光扫描设备进行扫描,激光扫描设备会受到人体转动的影响,例如当用户的手没有拿稳激光扫描设备时,激光扫描设备自身的位姿会发生变化,从而导致扫描装置相对于惯性坐标系的速度会叠加激光扫描设备自身转动的角速度,如此,虽然驱动装置驱动扫描装置匀速转动,但扫描装置相对于惯性坐标系的转动速度实际上是不均匀的,从而降低扫描精度,采用该扫描装置得到的扫描结果与实际环境存在偏差。
22.基于此,本公开示例性实施例提供一种扫描设备,通过角速度传感器能够检测扫描设备自身的转动角速度信息,控制装置能够根据角速度传感器检测的扫描设备自身的转动角速度信息来控制扫描装置的转速,以保证扫描装置相对于惯性坐标系始终保持匀速转动,减少或消除扫描设备自身的转动对扫描结果的影响,从而提高扫描设备的扫描精度。
23.本公开一示例性实施例提供一种扫描设备,如图1所示,该扫描设备包括主体部100、扫描装置200和转动支架300,其中,转动支架300可相对主体部100转动,扫描装置200设置于转动支架300上,从而使得扫描装置200随转动支架300转动。
24.扫描装置200用于对环境进行扫描以获得其所在环境的点云信息,扫描装置200例如可以为雷达,示例性地,扫描装置200为激光雷达,则扫描得到所在环境的激光点云信息。
25.如图2至图6所示,主体部100包括外壳110以及设置于外壳110内的驱动装置120、控制装置130和角速度传感器140。其中,驱动装置120用于驱动转动支架300转动,进而带动转动支架300上的扫描装置200转动。驱动装置120例如可以为电机,示例性地,驱动装置120包括无刷直流电机,无刷直流电机驱动转动支架300及其上的扫描装置200转动,以获得更多视野范围内的点云信息。
26.角速度传感器140用于检测扫描装置200的转动角速度信息,由于角速度传感器140为固定件,不会随扫描装置200转动,因此,角速度传感器140能够检测出扫描设备自身相对惯性坐标系的转动角速度信息。角速度传感器140例如可以为imu(inertial measurement unit,惯性测量单元)。
27.转动支架300与驱动装置120连接,转动支架300包括支架本体310以及设置于支架本体310上的电连接部320,扫描装置200安装于支架本体310,且扫描装置200通过电连接部320与控制装置130连接,如此,控制装置130可通过电连接部320向扫描装置200供电,扫描装置200可通过电连接部320将扫描结果例如点云信息发送至控制装置130。
28.控制装置130可根据角速度传感器140检测的转动角速度信息对驱动装置120进行控制,以控制转动支架300的转速,使得转动支架300相对惯性坐标系的转速保持恒定,进而保证扫描装置200相对惯性坐标系的转动均匀性,即,使得扫描装置200相对惯性坐标系为匀速转动。
29.本实施例中,在扫描设备的主体部100内设置有角速度传感器140,控制装置130能够根据角速度传感器140检测的扫描设备自身的转动角速度信息对扫描装置200的转动速度进行调节,使得扫描装置200能够相对惯性坐标系匀速转动,从而减少或消除扫描设备自身的转动对扫描结果的影响,提高扫描设备的扫描精度。
30.示例性地,控制装置130首先确定扫描装置200的预设角速度wr,该预设角速度wr可以是一个确定的值,例如出厂前预先烧写在控制装置130中的值。也可以在控制装置130中存储多个值,用户可根据需求选择一个值作为预设角速度wr。还可以是用户直接将预设角速度wr的值发送给控制装置130。
31.在使用扫描装置200进行扫描时,控制装置130获取角速度传感器140检测的转动角速度信息,例如,获取转动角速度wb,控制装置130根据预设角速度wr和转动角速度wb来确定目标角速度w,例如,目标角速度w=wr-wb,并根据目标角速度w向驱动装置120发送控制信号,使得驱动装置120驱动扫描装置200以目标角速度w转动,从而使得扫描装置200相对惯性坐标系的转动速度不会受扫描设备自身转动的影响(例如用户手部抖动),保持扫描装置200相对惯性坐标系匀速转动。
32.一些实施例中,扫描设备可以可拆卸设置于手持支架上,例如,扫描设备的主体部100下方设置有通用接口结构,通过通用接口结构与手持支架连接,以实现扫描设备的手持扫描操作,另外,该扫描设备还可以通过通用接口结构安装于无人机、汽车等设备上,以实
现无人机、汽车的自动驾驶。另一些实施例中,如图1所示,扫描设备还包括手柄部400,手柄部400与主体部100可拆卸连接,如此,当用户需要手持时,将手柄部400与主体部100连接,此时用户可手持手柄部400进行扫描操作,还可将手柄部400拆除,直接将主体部100安装于无人机、汽车等设备上,从而实现无人机、汽车等设备的自动驾驶控制。
33.继续参考图1和图4,手柄部400包括长形壳体410,长形壳体410的外侧设置有防滑纹路411,以提高人手与手柄部400之间的摩擦力,避免用户手持扫描设备扫描时,扫描设备从人手中滑脱。长形壳体410内形成有电池仓,可在电池仓中设置电池420,从而为主体部100中的电器件供电。本实施例中,利用手柄部400内的空间形成电池仓,使得扫描设备的结构更加紧凑。手柄部400的顶部设置有侧向凸出的环形凸起412,外壳110与环形凸起412的形状相适配(后面有具体介绍),从而提高主体部100与手柄部400的连接可靠性,且保证手柄部400能够对主体部100形成稳定支撑。
34.为了便于检测扫描设备自身的转动角速度,需要保证角速度传感器140在用户正常手持状态下保持水平,基于此,需要在主体部100内设置一承载面来承载角速度传感器140,且该承载面在用户正常手持状态下与水平面平行。本公开一示例性实施例中,如图2至图4所示,主体部100内设置有第一电路板150,第一电路板150位于手柄部400的上方,且第一电路板150与手柄部400的中轴线垂直,角速度传感器140设置于第一电路板150上。可以理解的,此处所述的中轴线,指的是与手柄部400的延伸方向平行,且穿过手柄部400的横截面的几何中心的线,例如,当手柄部400的横截面为圆形时,中轴线穿过圆形的圆心,当手柄部400的横截面为方形时,中轴线穿过方形的对角线交点。
35.主体部100还包括第二电路板160,第二电路板160与第一电路板150呈夹角设置,例如,第二电路板160与第一电路板150相互垂直设置。第二电路板160位于第一电路板150的一侧,控制装置130设置于第二电路板160上。
36.本实施例中,利用第一电路板150的上表面作为承载面承载角速度传感器140,既能够实现角速度传感器140的安装,还能够利用第一电路板150承载其他电器元件以及利用第一电路板150实现一些电路的连接。另外,通过呈夹角设置的第一电路板150和第二电路板160分别来承载角速度传感器140和控制装置130,从而能够更加合理的利用主体部100的内部空间,使得主体部100的结构更加紧凑。
37.一些实施例中,第一电路板150和第二电路板160可以相互分离设置,第一电路板150上的角速度传感器140通过线束与控制装置130连接。另一些实施例中,第一电路板150上设置有第一电连接触点,第二电路板160上设置有第二电连接触点,第一电连接触点与第二电连接触点接触,以使得角速度传感器140通过第一电路板150和第二电路板160与控制装置130电连接。示例性地,第一电路板150上设置有插槽,第一电连接触点设置于插槽的槽壁上,第二电路板160的下边缘设置有插头,第二电连接触点设置于插头的表面上,如此,插头插入插槽内,既实现第一电路板150和第二电路板160的物理连接,又实现第一电路板150和第二电路板160的电连接。
38.继续参考图2和图4,第二电路板160与外壳110的一侧壁大致平行设置,例如,外壳110的侧壁包括第一侧壁111、第二侧壁112、第三侧壁113和第四侧壁114,第一侧壁111与第三侧壁113相对设置,第二侧壁112和第四侧壁114相对设置,第二电路板160与第四侧壁114相对设置。第二电路板160的第一表面与第四侧壁114相对,第二电路板160的与第一表面相
对的第二表面上设置控制装置130,第二表面上还设置有屏蔽罩壳,屏蔽罩壳罩设于控制装置130上,以实现对控制装置130的屏蔽作用,避免对控制装置130造成信号干扰。
39.为了保证控制装置130工作在正常的温度范围内,避免控制装置130工作温度过高而影响其正常的工作,如图3和图4所示,第二电路板160的第一表面与第四侧壁114间隔设置,从而在第一表面与第四侧壁114之间形成间隔空间来容置散热装置170,散热装置170例如可以为散热风机。一些实施例中,散热装置170安装于第二电路板160的第一表面上,如此,方便控制装置130通过第二电路板160上的线路实现对散热装置170的控制。第四侧壁114上还设置有散热孔,以便散热装置170将热量经散热孔散出。例如,当散热装置170为散热风机时,散热风机能够驱动气流流经控制装置130,从而将控制装置130的热量带走,并将携带热量的热气流经散热孔吹出,实现对控制装置130的降温。
40.一些实施例中,散热孔直接形成在第四侧壁114上,在另一些实施例中,如图4所示,第四侧壁114的中部内凹形成内凹部114a,散热装置170设置于内凹部114a中,第四侧壁114上设置有覆盖内凹部114a开口的盖板114b,散热孔设置于盖板114b上。如此设计,方便散热装置170的拆装,且方便外壳110的加工成型,简化模具。
41.继续参考图2,外壳110还包括顶壁115,顶壁115相对手柄部400的轴线倾斜设置,顶壁115上设置有第一开口115a,驱动装置120固定于顶壁115的内侧,转动支架300经第一开口115a与驱动装置120连接。
42.由于扫描设备为手持式,用户在手持扫描设备进行扫描时,大部分场景是在地面以及高于地面的远处场景,因此,扫描设备的主体部100等结构会对扫描装置200的扫描区域形成遮挡,本实施例中,将转动支架300设置在倾斜的顶壁115上,从而使得人体遮挡的扫描区域与主体部100等结构遮挡的扫描区域尽量的重叠,从而避免扫描角度的浪费。另外,如此设计可以使得驱动装置120位于第一电路板150和第二电路板160之间的空间,从而使得主体部100的整体结构更加紧凑。
43.示例性地,支架本体310包括第一夹持部311、第二夹持部312以及连接第一夹持部311和第二夹持部312的安装板313,扫描装置200可经第一夹持部311和第二夹持部312之间的开口卡入第一夹持部311与第二夹持部312之间。安装板313与顶壁115平行设置,如图5所示,安装板313与驱动装置120连接,例如可以通过插接、紧固件连接等方式与驱动装置120连接,从而使得驱动装置120能够经安装板313带动扫描装置200转动。
44.电连接部320的部分结构穿出安装板313,以穿过驱动装置120与控制装置130连接。电连接部320例如可以为导电滑环。驱动装置120上还设置有编码器,通过编码器可以检测驱动装置120的旋转角度。
45.一实施例中,顶壁115、第一侧壁111、第二侧壁112、第三侧壁113以及底壁116形成为一体结构,例如构成盖体,盖体的边缘能够与第四侧壁114的边缘固定连接,例如卡接或者紧固件连接,以形成完整的外壳110。如此,当需要对控制装置130、驱动装置120、角速度传感器140等电器件进行检修时,只需要将盖体与第四侧壁114分离,提高检修效率。
46.继续参考图2,第四侧壁114的底部以及底壁116上设置有凹槽117,凹槽117的形状与环形凸起412的形状适配,如此,当主体部100与手柄部400安装在一起时,第四侧壁114与底壁116将环形凸起412的整个外周包覆,从而提高主体部100与手柄部400的连接可靠性。
47.如前所述,手柄部400与主体部100为可拆卸连接,为了方便拆卸,第四侧壁114的
底部还设置有锁定解锁组件,通过锁定解锁组件可实现手柄部400与主体部100之间的锁定和解锁。示例性地,如图6所示,第四侧壁114的底部滑动设置有滑动件181,滑动件181的一端设置有插入部181a,滑动件181的另一端设置有弹簧182,滑动件181上还连接有操作部183,操作部183为外露结构,在装配状态下,插入部181a在弹簧182作用下插入手柄部400中,以实现主体部100与手柄部400的固定连接,用于可通过操作部操作使得插入部与手柄部400相脱离,以实现手柄部400与主体部100的解锁。
48.本公开一示例性实施例中,扫描设备还包括彩色相机500,彩色相机500设置于外壳110上,彩色相机500与控制装置130连接。控制装置130还用于根据彩色相机500获取的彩色图像信息以及扫描装置200获取的点云信息,生成彩色点云信息。
49.本实施例中,通过扫描装置200可以获取扫描空间的点云信息,通过彩色相机500能够获取扫描空间的带有色彩信息的图像信息即彩色图像信息,如此,将彩色图像信息与点云信息结合即可生成彩色点云信息。示例性地,可以获取彩色图像信息中各个像素点的位姿信息,而点云信息中的各个点云也是带有位姿信息的,如此,可以根据像素点的位姿信息和各个点云的位姿信息,建立像素点与点云的映射关系,从而将像素点对应的颜色信息与点云合并,得到彩色点云信息。
50.一实施例中,参考图4,外壳110内设置有支撑结构190,支撑结构190包括呈夹角设置的第一板部191和第二板部192,第一板部191与手柄部400的中轴线垂直,第一板部191承载角速度传感器140,示例性地,第一电路板150设置于第一板部191上。第二板部192与第一板部191的一侧边相连,彩色相机500固定于第二板部192。支撑结构190可以固定于第四侧壁114上,例如,通过紧固件固定于第四侧壁114上,通过支撑结构190同时实现对角速度传感器140以及彩色相机500的支撑,既能够保证整体结构可靠性,又能够使得主体部100的结构紧凑。外壳110上与彩色相机500对应的位置设置有第二开口112a,彩色相机500的镜头经第二开口112a露出,示例性地,如图2所示,第二开口112a设置于与第四侧壁114相对的第二侧壁112上。
51.一实施例中,扫描设备还包括第一数据接口,与控制装置130连接,第一数据接口用于连接外接设备,以使得控制装置130通过第一数据接口与外接设备通信。第一数据接口例如可以为usb(universal serial bus,通用串行总线)接口,示例性地,第一数据接口为usb3.1接口。usb接口可进行自动主从切换功能,当扫描设备接入电脑时,扫描设备端将自动切换为从设备以u盘形式显示,用户可以将扫描设备上扫描的点云数据以及图像数据拷贝到电脑中。另外,usb接口还可支持连接5g模块,用户可以在远程查看实时扫描过程。
52.扫描设备还包括存储装置,存储装置例如为固态硬盘,控制装置130可以将扫描装置200扫描得到的点云信息以及彩色相机500采集的彩色图像信息写入固态硬盘中进行存储。
53.扫描设备还包括第二数据接口,与控制装置130连接,第二数据接口用于连接定位系统,例如连接rtk(real
ꢀ‑ꢀ
time kinematic,实时动态)系统,激光slam算法将会自动融合rtk信息,提高激光点云精度。
54.示例性地,当rtk 系统处于无信号状态时,此时slam状态方程会将设备移动位置以及设备旋转姿态作为状态变量同时进行估计。当rtk系统处于float状态(即浮点解)时,此时slam状态方程会将设备移动位置以及设备旋转姿态作为状态变量同时进行估计。该设
备移动位置将会与rtk位置进行加权后作为一次状态估计的初值。当rtk处于fix状态(即固定解)时,此时激光slam状态方程并不会将设备移动位置作为状态变量,而是将rtk位置转换到设备机体坐标系后,直接使用该位置作为已知量,并估计设备旋转姿态。
55.扫描设备还包括供电接口,与控制装置130连接,如此,当手柄部400拆卸下来时,可通过供电接口为扫描设备供电。其中,供电接口与第二数据接口可以集成为一个防水接口。
56.扫描设备还包括无线通信模块,与控制装置130连接。无线通信模块例如可以为wifi(wireless fidelity,无线保真)模块,当扫描设备启动时,自动开启wifi热点功能,同时通过手机等移动设备连接扫描设备,扫描设备可通过通信协议将彩色点云以及相机图像实时发送到移动终端,用户可通过移动终端查看实时扫描的3d点云以及图像。
57.本公开一示例性实施例还提供了一种扫描设备的控制方法,该控制方法例如可以控制上述的扫描设备,如图7所示,扫描设备的控制方法包括:s100、获取扫描设备的转动角速度信息;s200、基于预设角速度信息以及转动角速度信息,确定目标角速度信息;s300、向驱动装置发送目标角速度信息,以使得驱动装置基于目标角速度信息驱动扫描装置转动。
58.本实施例中,根据扫描设备自身的转动角速度信息对扫描装置200的转动速度进行调节,使得扫描装置200能够相对惯性坐标系匀速转动,从而减少或消除扫描设备自身的转动对扫描结果的影响,提高扫描设备的扫描精度。
59.示例性地,首先确定扫描装置200的预设角速度wr,该预设角速度wr可以是一个确定的值,例如出厂前预先烧写在控制装置130中的值。也可以在控制装置130中存储多个值,用户可根据需求选择一个值作为预设角速度wr。还可以是用户直接将预设角速度wr的值发送给控制装置130。
60.在使用扫描装置200进行扫描时,获取角速度传感器140检测的转动角速度信息,例如,获取转动角速度wb,根据预设角速度wr和转动角速度wb来确定目标角速度w,例如,目标角速度w=wr-wb,并根据目标角速度w向驱动装置120发送控制信号,使得驱动装置120驱动扫描装置200以目标角速度w转动,从而使得扫描装置200相对惯性坐标系的转动速度不会受扫描设备自身转动的影响(例如用户手部抖动),保持扫描装置200相对惯性坐标系匀速转动。
61.本公开一示例性实施例中,如图8所示,扫描设备的控制方法还包括:s10、获取彩色图像信息和点云信息;s20、确定彩色图像信息中的各像素点的位姿信息与点云信息中的各点云的映射关系;s30、基于彩色图像信息、点云信息以及映射关系,得到彩色点云信息。
62.示例性地,可以获取图像信息中各个像素点的位姿信息,而点云信息中的各个点云也是带有位姿信息的,如此,可以根据像素点的位姿信息和各个点云的位姿信息,建立像素点与点云的映射关系,从而将像素点对应的颜色信息与点云合并,得到彩色点云信息。
63.上面描述的内容可以单独地或者以各种方式组合起来实施,而这些变型方式都在本公开的保护范围之内。
64.本公开是参照根据本公开实施例的方法、装置(设备)和计算机程序产品的流程图和/或方框图来描述的。应理解可由计算机程序指令实现流程图和/或方框图中的每一流程和/或方框、以及流程图和/或方框图中的流程和/或方框的结合。可提供这些计算机程序指令到通用计算机、专用计算机、嵌入式处理机或其他可编程数据处理设备的处理器以产生一个机器,使得通过计算机或其他可编程数据处理设备的处理器执行的指令产生用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的装置。
65.这些计算机程序指令也可存储在能引导计算机或其他可编程数据处理设备以特定方式工作的计算机可读存储器中,使得存储在该计算机可读存储器中的指令产生包括指令装置的制造品,该指令装置实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能。
66.这些计算机程序指令也可装载到计算机或其他可编程数据处理设备上,使得在计算机或其他可编程设备上执行一系列操作步骤以产生计算机实现的处理,从而在计算机或其他可编程设备上执行的指令提供用于实现在流程图一个流程或多个流程和/或方框图一个方框或多个方框中指定的功能的步骤。
67.在本公开中,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括
……”
限定的要素,并不排除在包括所述要素的物品或者设备中还存在另外的相同要素。
68.尽管已描述了本公开的优选实施例,但本领域技术人员一旦得知了基本创造性概念,则可对这些实施例作出另外的变更和修改。所以,所附权利要求意欲解释为包括优选实施例以及落入本公开范围的所有变更和修改。
69.显然,本领域技术人员可以对本公开进行各种改动和变型而不脱离本公开的精神和范围。这样,倘若本公开的这些修改和变型属于本公开权利要求及其等同技术的范围之内,则本公开的意图也包含这些改动和变型在内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。