技术特征:
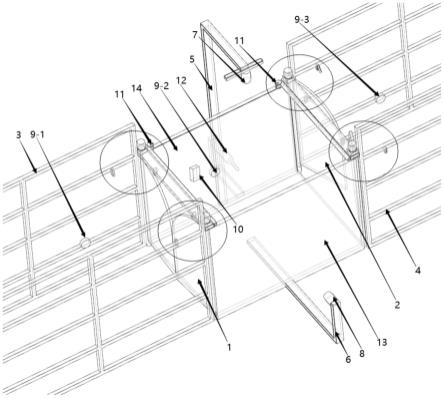
1.一种从侧视、俯视双视角图像自动测量羊体尺的装置,其特征在于它包括:设置于图像采集室出口处的出口门禁(1)、出口外的出口通道围栏(3),出口通道围栏(3)内侧设置有出口光电传感器(9-1);设置于图像采集室入口处的入口门禁(2)、入口外的入口通道围栏(4),入口通道围栏(4)内侧设置有入口光电传感器(9-3);侧视相机(8)基于侧视相机支架(6)设置于图像采集室的一侧,用于拍摄羊体侧视图像;俯视相机(7)基于俯视相机支架(5)设置于图像采集室的顶部,用于拍摄羊只俯视图;图像采集室的侧视相机(8)侧设置玻璃挡板(13),玻璃挡板(13)的对侧为可移动挡板(14),电动推杆(12)的伸缩端与可移动挡板(14)连接;可移动挡板(14)在电动推杆(12)的作用下在靠近玻璃挡板(13)或远离玻璃挡板(13)的方向移动以调整图像采集室的宽度,从而适应不同大小的羊体图像采集需求;可移动挡板(14)内侧设置有可移动挡板光电传感器(9-2);可移动挡板(14)内侧设置有rfid阅读器(10),用于记录位于图像采集室的羊的身份信息;处理器基于图像采集室获取的图像信息自动计算获得羊体尺数据。2.根据权利要求1所述的装置,其特征在于侧视相机(8)的高度与侧视图像采集侧玻璃挡板(13)的中心点同高。3.根据权利要求1所述的装置,其特征在于入口光电传感器(9-3)、图像采集室可移动挡板光电传感器(9-2)、出口光电传感器(9-1)的安装高度处于羊只腹部所在高度。4.根据权利要求1所述的装置,其特征在于图像采集室可移动挡板光电传感器(9-2)安装位置靠近出口门禁(1),确保羊完全进入图像采集室后触发入口门禁(2)关闭信号;出口光电传感器(9-1)安装于远离出口门禁(1)的位置,保证羊完全离开后触发出口门禁(1)的关闭信号。5.根据权利要求1所述的装置,其特征在于入口门和出口门结构一致,均为两扇门结构,两扇门由中间向图像采集室外滑动90
°
开启,共记结构一致的四扇子门;第一出口子门(1-1)配套设置有第一电机(18)、第一限位开关(16)、第二限位开关(17);第一限位开关(16)安装在出口通道围栏(3)上,第二限位开关(17)安装在出口横梁(15)下方,当第一出口子门(1-1)开启或关闭到预定角度并触碰到第一限位开关(16)或第二限位开关(17)的限位杆时,plc向第一电机(18)发出停止命令,实现第一出口子门(1-1)的打开或关闭动作的自动停止。6.一种从侧视、俯视双视角图像自动测量羊体尺的方法,基于权利要求1-5任一项所述的装置,其特征在于它包括以下步骤:s1:入口光电传感器(9-3)被遮挡,图像采集室的可移动挡板光电传感器(9-2)未被遮挡,入口门禁(2)打开;s2:图像采集室的可移动挡板光电传感器(9-2)被遮挡,入口门禁(2)关闭,打开并驱动俯视相机(7)拍摄羊的俯视图,自动提取羊的体宽信息并根据羊的体宽调整图像采集室可移动挡板(14)的位置,使羊体侧面靠近图像采集室侧透明玻璃(13);s3:打开侧视相机(8),同时驱动俯视相机(7)和侧视相机(8)拍摄羊的侧视、俯视图像并保存至计算机;s4:打开出口门禁(1),若出口光电传感器(9-1)被遮挡则关闭出口门禁(1),图像采集室可移动挡板(14)恢复到初始位置。
7.根据权利要求6所述的方法,其特征在于羊体尺信息采用步骤s5至s12自动提取:s5:对步骤s3采集到的羊侧视图和俯视图执行灰度化、二值化操作;s6:获取俯视图中羊身体部分的最小外接矩形,记其长为tr_len,获取侧视图中羊身体部分的最小外接矩形,记其长为sr_len,以sr_len为标准,对俯视图进行仿射变换并记变换后俯视图中羊身体外接矩形长为tr_len’,使得tr_len’和sr_len相等,仿射变换后的俯视图、侧视图中羊的外接矩形内的图像区域分别记为t和s;s7:在侧视图s中提取两只前蹄与地面接触点纵坐标,将纵坐标较大的接触点记为k、纵坐标较小的接触点记为j,记点k坐标为(x
k
,y
k
),j点的坐标记为(x
j
,y
j
),取k、j连线的中点作为体高下端点b,记其横坐标为x
b
,过点(x
b
,0)作垂直于侧视图s上边缘的垂线,取该垂线与羊体背部轮廓交点作为体高上端点,记为a,计算点a到点b之间的欧式距离作为羊体高;s8:在侧视图s中取两只后蹄与地面接触点的横坐标,将横坐标较小的点记作l,横坐标较大的点记为m,计算点k和点l横坐标的平均值并记为x
k_l
,选取侧视图s中横坐标处于[x
b
,x
k_l
]区间,纵坐标处于区间的像素点构成的区域并记为roi-1,在roi-1中对侧视图s上边缘上的点(x
k_l
,0)到点(x
b
,0)间每一个像素点作过该像素点且垂直于侧视图s上边缘的垂线,对于每一条垂线按从上到下的方向统计处于roi-1内的非0像素值点数量并在第一次出现0像素值点时停止当前垂线上非0像素值点的统计,绘制非0像素值点数量变化曲线,取曲线上最小值并记其横坐标为x
k_l_min
,在侧视图s中过点(x
k_l_min
,0)作垂直于侧视图s上边缘的垂线,提取该垂线与腹部交点为胸深下端点,记为f,该垂线与背部轮廓交点作为胸深上端点,记为e,计算点e、f之间的欧氏距离即为胸深,记为depth_bre;s9:在俯视图t中,提取羊躯体主轴线,过主轴线每一点作垂直于主轴线的垂线,以主轴线上各点横坐标作为自变量,以垂线上非0像素值点的数量为因变量,绘制羊躯体宽度变化曲线,对该曲线做平滑处理后的平滑曲线记为c
body_width
,提取自c
body_width
最大值点到第二最大值点之间的第一个极大值点对应的体宽作为羊的胸宽,若极大值点不存在,则取凸转凹的拐点对应的体宽作为胸宽,胸宽记为width_bre;s10:利用公式2π
×
width_bre 4(depth_bre-width_bre)拟合得到胸围体尺;s11:选取侧视图s中以点(0,y
j
)、(x
k_l
,y
j
)为端点的线段,记该线段为seg,按如下步骤s11a至s11d从侧视图s中提取羊左前腿管围尺寸:s11a:计算seg经过的侧视图s的前景区域数量,若为2,则将seg垂直上移1个像素,循环执行步骤s11a,直至seg在侧视图s中经过的前景区域数量为1,转步骤s11b;s11b:将seg下移1个像素,提取seg与侧视图s两段相交线段的4个端点,选择横坐标第三大的端点作为两前肢夹角顶点,记为n,其坐标记为(x
n
,y
n
);s11c:选取侧视图s横坐标处于[2x
k-x
b
,x
b
]区间,纵坐标处于[y
n
,y
k
]区间的像素点构成的区域并记为roi-2,在roi-2中对y轴上点(0,y
n
)到点(0,y
k
)间每一个像素点作过该像素点且垂直于y轴的垂线,统计垂线上非0像素点数量并绘制非0像素点数量变化曲线,选取变化曲线中最小值点定位管围最细处,提取该处横截面宽度作为管径,管径记作w
g
;s11d:使用公式拟合得到管围尺寸;s12:过胸深上端点e作斜率为1的直线,该直线与前胸轮廓交点记为c,将c作为体斜长的前端点,采用步骤s12a至s12d定位体斜长后端点并计算体斜长:
s12a:选取羊躯体宽度变化曲线c
body_width
上最大极大值点到第二大极大值点之间的最小极小值,记该值在c
body_width
曲线上的点为min_c
body_width
,过点min_c
body_width
作平行于横轴的直线并与曲线c
body_width
上最大极大值所在点右侧的曲线部分相交,记该交点为p1_c
body_width
;s12b:对点p1_c
body_width
到羊躯体宽度变化曲线c
body_width
最右侧端点间的各个点求其二阶导数,若存在二阶导数为0的点,则提取第一个二阶导数为0的点并记该点横坐标为x_p_end,若不存在二阶导数为0的点,则记c
body_width
最右侧端点的横坐标为x_p_end;s12c:取侧视图s的上半段、右侧1/4内像素点构成的区域作为目标区域并记该区域为roi-3,定位roi-3中前景区域横坐标最大点并记其纵坐标为y_end,将坐标为(x_p_end,y_end)的点作为体斜长的后端点并记其为q;s12d:在侧视图s中,连接cq并取线段cq的长度作为羊的体斜长。
技术总结
本发明公开了一种从侧视、俯视双视角图像自动测量羊体尺的装置,装置主要包括PLC控制的门禁系统、配有侧视、俯视相机的图像采集模块、图像采集室。图像采集室一侧是透明玻璃,另一侧是连接电动推杆的可移动挡板,根据俯视图像中获取的羊只大小自动调节图像采集室宽度以适应不同体况羊只体尺测量需求。利用侧视、俯视图像中前景最小外接矩形等长特点校正侧视、俯视图像,综合利用侧视、俯视图像中羊只体尺关键点特征自动定位体尺关键点,利用欧氏距离计算体高、胸深、胸宽、体斜长和管径,将胸深、胸宽作为长短轴参数椭圆拟合得到胸围,利用管径拟合得到管围。本发明可在减少人畜接触,降低人工开销的前提下,自动提供客观的羊体尺参数。数。数。
技术研发人员:陆明洲 光二颖 王锋 张国敏 陈子康 沈明霞 熊迎军 刘龙申
受保护的技术使用者:南京农业大学
技术研发日:2022.08.24
技术公布日:2022/11/25
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。