1.本发明属于uwb无线定位技术领域,具体来讲为一种多参数滑坡瞬变及蠕变实时监测系统及方法。
背景技术:
2.uwb定位技术全称是超宽带定位技术,是一种利用无限载波通信来对特定场景进行实时精准定位的技术。与传统通信技术不同,uwb技术不采用传统的正弦载波,而是通过发送与接受纳秒甚至纳秒级以下的窄脉冲来进行数据传输,具有ghz级别的带宽。因为其极强的穿透力、较低的功耗、高安全性、抗多径效果好等优点,被广泛应用于室内静止及移动物体的精确定位与导航。由于其定位的高精确性,在各个领域都能够提供十分精确的定位精度。
3.cn102546680公布了一种对室内人员进行跟踪定位的uwb系统。通过交换机、传感器、定位标签等模块,通过主、从传感器接收标签发射的uwb定位信号,进行数据融合和分析后得到定位数据,很好的解决了室内定位范围小、精度低、抗干扰能力弱等问题。
4.cn104244175公布了一种度矿井环境进行监控定位和救援的uwb系统。通过uwb定位模块、环境监测模块、生命监测模块等,通过以太网架构传输定位数据与生命状态监测数据,将环境数据、定位数据与生命监测数据有效整合,实现矿井环境的实时监测与人员定位。
5.上述两项公开文件代表了uwb定位技术在室内以及室外复杂环境中均可对标记位置或人员进行实时的定位与监测,并可以得到较好的定位精度。但是,滑坡环境较为特殊,多数滑坡环境情况较为复杂,滑坡面分布较多岩石、沙土、树木、杂草等遮挡物,坡面高低不平,另外时常发生滑动,普通定位方式较难准确定位。如何在避免遮挡物影响的前提下,实现较大范围的准确定位是实现滑坡监测的新问题。
6.目前的滑坡监测技术手段中了繁多,包括接触式和非接触式两种。常用的滑坡形变监测方法有简易报警、大地测量、gnss监测、激光三维扫描等。这些传统监测手段采用不同的定位原理,在一定程度上能够对滑坡形变进行监测定位。但是由于精度低、范围有限、时效性低等原因,无法对滑坡进行高精度的实时监测。gnss采用gps定位技术和精密单点定位技术,能够对滑坡进行较为精准的定位,也是目前最为常见的野外定位技术方案。但由于滑坡坡面植被覆盖,环境复杂,gps卫星信号可能无法达到滑坡表面,从而对监测定位的精度产生较大影响。同时,高昂的成本也是限制gnss技术在滑坡监测领域使用的一个重要原因。
7.与传统手段相比,uwb定位技术具有强的穿透力、较低的功耗、高安全性、抗多径效果好、成本低、时效性好等优点,其技术特点更为适合用于滑坡监测领域。如何在避免遮挡物影响的前提下,实现较大范围的准确定位成为uwb技术应用的主要问题。
8.cn104143252公开了一种“基于uwb的滑坡实时监测系统”,利用arm处理器和uwb脉冲接收机为核心的微基站和uwb脉冲发射机为核心的位置标签,对滑坡的位置信息和环境
信息进行采集和综合分析,实时给出预警信息。
9.上述发明成功利用uwb技术实现滑坡的实时监测与定位。但是,uwb模块对滑坡的监测具有局限性,虽然能实现较为精准的定位,但其效果仅仅在微小蠕变时能取得较好结果。当滑坡发生较大瞬变滑动时,uwb的监测可能出现延时或精确度降低的结果。因此,需要设计一种实时的滑坡监测系统,能够同时对滑坡的瞬变和蠕变实现精准定位和监测,最终完成环境评估和滑坡预警。
技术实现要素:
10.本发明所要解决的技术问题在于提供一种多参数滑坡瞬变及蠕变实时监测系统及方法,完成滑坡复杂环境条件下的实时定位监测,同时具有易安装、低成本、可长时间无人运行等功能。
11.本发明是这样实现的,一种多参数滑坡瞬变及蠕变实时监测系统,该系统包括:
12.根据监测范围大小以及标定点数设置的多个定位基站数量和标签数量,其中,所述定位标签固定在滑坡表面标定点处,并实时发射uwb脉冲信号并监测加速度变化,定位基站均匀分布在监测滑坡四周不易滑动的坚固地表或基石上,用于接收标签发射的uwb脉冲信号,获取uwb定位数据以及加速度数据;
13.与任意一个定位基站链接,并采集定位基站的数据,将采集到的数据处理分析,并实时显示定位标签的位置坐标的控制平台。
14.进一步地,所述定位基站包括:第一mcu微控制单元、uwb接收模块、第一外置天线、温度传感器以及湿度传感器,所述mcu微控制单元作为核心处理器,负责控制系统各个模块的协调工作,发送相关指令,并对采集到的数据进行处理,第一mcu微控制单元发出通信指令时,uwb接收模块建立与标签中uwb发射模块的通信,通过第一外置天线接收uwb脉冲信号,完成接收时间的测量,然后将数据送至第一mcu微控制单元,从而得到标签与定位基站的距离数据,完成精确定位,所述温度传感器和湿度传感器能够监测滑坡周围环境的温度湿度信息,并将监测信息传送至第一mcu微控制单元,第一mcu微控制单元将接收到的标签位移、环境温度湿度、加速度变化信息传送至控制平台融合处理并分析,对滑坡发生的概率进行解算。
15.进一步地,所述定位标签包括:第二mcu微控制单元、uwb模块、第二外置天线以及六轴imu装置,所述定位标签通过第二外置天线接收定位基站发出的定位指令,并将uwb模块发射的uwb脉冲信号传输给定位基站,当加速度在瞬时发生较大变动时,六轴imu装置会测量出滑坡定位点的顺势加速度信息与位移前后的倾角信息,通过串口将数据送给uwb模块,将信息一同传递给定位基站,完成标签的定位。
16.进一步地,控制平台还用于将所有所述定位基站加入到同一个网络中,实现定位基站时间同步。
17.进一步地,所述控制平台还用于:将一个定位基站作为时间参考基站,其他的定位基站以它作为基准进行时间同步,得到定位标签发射的信号到达不同基站的时间差,根据时间差计算出定位标签到定位基站的距离差,根据几何原理,到达两个定点间的距离差是常数的点用于确定一条唯一的双曲线方程,通过三个定位基站,两两确定一组双曲线方程,通过联立即可求解出定位标签的三维位置。
18.进一步地,所述控制平台还用于选取一个定位基站为基准后,其它基站通过wifi通信方式发送电信号,根据收到的信号计算出不同定位基站相较于基准基站的距离和方向,对定位基站进行标定。
19.进一步地,所述定位基站以及所述定位标签均设置有ldo线性稳定器用于提供低电压供电,led指示灯用于标定处于工作状态的定位基站,以及太阳能电池板与蓄电池联合供的供电装置。
20.一种多参数滑坡瞬变及蠕变实时监测方法,该方法包括:
21.在滑坡顶端和底部选取不易滑动的基石或稳定部分作为定位基站的布置位置,在选取基站位置点时,使得定位基站可监测的区域包括整个待监测的滑坡面;
22.在滑坡面选取定位标签的布置点,用来监测滑坡的滑动变化情况;
23.在布设好定位基站和定位标签后,将所有定位基站置于同一个无线局域网中,选取一个定位基站作为观测点,其它基站通过wifi通信方式发送电信号,控制平台根据收到的信号自动结算出不同基站相较于基准基站的距离和方向,将整个网络中的基站位置和标签位置标定出来;
24.作为观测点的基站发送开始信号,整个系统开始进行定位工作;
25.定位标签发射uwb脉冲,传送至定位基站;
26.定位基站解算脉冲到达时间,从而得到定位标签与各个定位基站之间的距离;
27.根据采集的数据信息,对定位标签的定位计算以及位移计算;
28.控制平台实时显示标签位置,并根据位置变化和加速度变化信息以及结合系统还能对所处环境的温度湿度进行监测,判断当前变化量是否达到大规模滑坡的危险红线,进行滑坡预警。
29.进一步地,定位计算包括:将一个定位基站作为时间参考基站,其他的定位基站以它作为基准进行时间同步,得到定位标签发射的信号到达不同基站的时间差,根据时间差计算出定位标签到定位基站的距离差,根据几何原理,到达两个定点间的距离差是常数的点用于确定一条唯一的双曲线方程,通过三个定位基站,两两确定一组双曲线方程,通过联立即可求解出定位标签的三维位置。
30.进一步地,所述双曲线方程为:
[0031][0032][0033][0034]
其中,三个定位基站的三维空间坐标分别为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),待测定位标签的位置为(x,y,z),d
21
、d
31
和d
23
分别为三个定位基站之间两两定位基站之间的距离。
[0035]
本发明与现有技术相比,有益效果在于:
[0036]
本发明能够同时对滑坡的瞬变和蠕变实现精准定位和监测,最终完成环境评估和滑坡预警,采用基于信号到达基站的时间差定位技术(tdoa)进行定位解算,可以使系统实
现时间同步的难度变小,成本降低。
[0037]
定位标签内置uwb模块与imu装置,引入加速度这一参考量,能采集高精度的滑坡瞬变位移和蠕变位移数据。并可以利用控制平台的通过与一个定位基站的连接,直接标定网络中所有基站和标签的位置,不需要人工手动标定,使用方便。
附图说明
[0038]
图1为本发明实施例提供的多参数滑坡瞬变及蠕变实时监测的模块框图;
[0039]
图2为本发明实施例提供的定位基站模块框图;
[0040]
图3为本发明实施例提供的定位标签的模块框图;
[0041]
图4为本发明实施例提供的时间差定位技术(tdoa)进行定位解算原理图;
[0042]
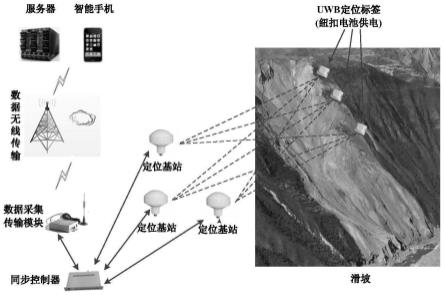
图5为本发明实施例提供的多参数滑坡瞬变及蠕变实时监测系统进行监测的布置示意图。
具体实施方式
[0043]
为了使本发明的目的、技术方案及优点更加清楚明白,以下结合实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
[0044]
如图1所示,本发明是由多个定位基站和定位标签组成的无线定位网络系统。基站数量和标签数量可以根据实际监测范围大小以及标定点数多少增减。定位标签固定在滑坡表面标定点处,实时发射uwb脉冲信号并监测加速度变化。定位基站均匀分布在监测滑坡四周不易滑动的坚固地表或基石上,用于接收标签发射的uwb脉冲信号,获取uwb定位数据以及加速度数据,同时利用温度、湿度传感器对滑坡环境数据进行监测。控制平台与任意一个定位基站链接,将采集到的数据处理分析,实时显示定位标签的位置坐标,实现滑坡的瞬变和蠕变的精准定位。同时将多方位数据融合分析,从而进行滑坡预警。
[0045]
定位基站结构图如图2所示,包括:第一mcu微控制单元、uwb接收模块、第一外置天线、第一ldo线性稳定器、led指示灯、温度传感器、湿度传感器以及供电装置。供电装置采用太阳能电池板与蓄电池联合供电的方案,可以实现长时间的无人定位。供电电压为3.7v左右。工作时,led指示灯变为绿色,表明uwb定位基站处于工作状态。第一mcu微控制单元作为核心处理器,负责控制系统各个模块的协调工作,发送相关指令,并对采集到的数据进行处理。控制单元发出通信指令时,第一uwb接收模块建立与标签中uwb发射模块的通信,通过第一外置天线接收uwb脉冲信号,完成接收时间的测量,然后将数据送至控制单元,从而得到标签与基站的距离数据,完成精确定位。温度、湿度传感器能够监测滑坡周围环境的温度湿度信息,并将监测信息传送至控制单元。控制单元将接收到的标签位移、环境温度湿度、加速度变化信息传送至控制平台融合处理并分析,对滑坡发生的概率进行解算,从而进行滑坡的实时预警。第一ldo线性稳定器则保证定位基站获得线性稳定的低电压,能够正常工作。
[0046]
定位标签的结构如图3所示,包括:第二mcu微控制单元、uwb模块、第二外置天线、第二ldo线性稳定器、第二led指示灯、六轴imu装置以及供电装置组成。供电装置、第二led指示灯和第二ldo线性稳定器的作用与定位基站中相同模块作用基本相同。定位标签通过
外置天线接收定位基站发出的定位指令,并将uwb模块发射的uwb脉冲信号传输给定位基站。当加速度在瞬时发生较大变动时,六轴imu装置会测量出滑坡定位点的顺势加速度信息与位移前后的倾角信息,通过串口将数据送给uwb模块,将信息一同传递给定位基站,完成标签的定位。
[0047]
若把滑坡表面看作一个长方形,仅在表面对标定点位进行实时定位,仅需要三个基站就可完成。若在三维立体空间对滑坡进行更为精确的定位时,至少需要四个基站才能满足3d空间的定位要求。
[0048]
常见的uwb定位系统一般采用时间到达(toa)的测量原理进行定位。分别测量标签到基站的tof(飞行时间),乘以光速后获得标签到各个基站的距离,然后再进行最小二乘法计算求解自身坐标。但是在复杂的滑坡环境中,由于遮挡物与其他环境因素的影响,使用toa测量原理很难求得标签的精准定位信息。本发明采用基于信号到达基站的时间差定位技术(tdoa)进行定位解算。tdoa技术则是是在toa方法上的改进,将两个基站之间采取时间同步,这样可以使系统实现时间同步的难度变小,成本降低。实现基站之间的时间同步是相对容易的,只要把所有的基站加入到同一个网络中便可以实现。它的定位步骤先将一个基站作为时间参考基站,其他的基站以它作为基准进行时间同步,得到标签发射的信号到达不同基站的时间差,得到时间差可以计算出标签到基站的距离差。由于每个基站的位置是固定不变的,并且基站与基站之间的距离是已知的,根据几何原理,到达两个定点间的距离差是常数的点可以确定一条唯一的双曲线方程。通过三个基站,两两确定一组双曲线方程,通过联立即可求解出标签的三维位置,其原理图如图4所示。
[0049]
图4中ap1、ap2和ap3为定位基站,p1为待定位的标签点,d21为根据信号到达基站ap2和到达基站ap1的时间差换算出的距离,同理设定d31和d23。可得d
21
=c
·
δt
21
,d
31
=c
·
δt
31
和d
23
=c
·
δt
23
,其中,δt可以根据信号到达各基站的时间测量获得。设基站的三维空间坐标分别为(x1,y1,z1),(x2,y2,z2),(x3,y3,z3),待测标签的位置有(x,y,z),则有式:
[0050][0051][0052][0053]
根据上式可以联立求解出待测标签的三维坐标位置,而测量系统对时间同步的要求也能够显著降低,由此可以提高uwb系统的测量精度。
[0054]
本发明提供了一种多参数滑坡瞬变及蠕变实时监测方法(如图5所示):
[0055]
首先,在滑坡顶端和底部选取不易滑动的基石或稳定部分作为基站的布置位置,确保基站在布设后不会轻易移动,从而确保测量的准确性。在选取基站位置点时,要注意基站可监测的区域包括整个待监测的滑坡面。选取好适当位置后,用三脚架对基站实施固定。
[0056]
第二,在滑坡面选取标签的布置点,用来监测滑坡的滑动变化情况。本实施例中,每一个ltp器件的监测范围是500m,在具体布设时,可以考虑具体滑坡环境对监测和传输情况的影响,适当增加布设点数,以提高测量准确率。
[0057]
第三,在布设好基站和标签后,选取一个基站作为观测点,将整个网络中的基站位置和标签位置标定出来。将所有基站置于同一个无线局域网中,选取一个基站为基准,其它基站通过wifi通信方式发送电信号,系统可以根据收到的信号自动结算出不同基站相较于基准基站的距离和方向,从而实现一键标定,不需要对每一个布设点的初始位置进行手动测量。
[0058]
第四,主基站发送开始信号,整个系统开始进行定位工作。
[0059]
第五,定位标签发射uwb脉冲,传送至定位基站。
[0060]
第六,定位基站解算脉冲到达时间,从而得到标签与各个基站之间的距离。
[0061]
第七,根据采集的多元数据信息,对标签的位移进行精准解算,通过采集到的各个距离数据精准定位标签的实时位置情况,并可以在终端实时模拟标签的位移情况。当加速度顺势变化量很大时,根据加速度值计算出瞬时的位移大小,对标签的当前位置进行校准。
[0062]
第八,控制平台实时显示标签位置,并根据环境信息进行解算,除了能够实时监测滑坡的位置变化和加速度变化信息,系统还能对所处环境的温度湿度进行监测,相关专业人员可根据采集的信息结合不同地区的土壤环境和地质结构以及当前天气情况,判断当前变化量是否达到大规模滑坡的危险红线,从而实现滑坡预警。
[0063]
以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。