1.本发明涉及救援设备技术领域,具体为一种多传感器融合的煤矿救援机器人及其控制方法。
背景技术:
2.煤矿是指富含煤炭资源的地方,一般分为井工煤矿和露天煤矿;当煤层离地表远时,一般选择向地下开掘巷道采掘煤炭,此为井工煤矿。当煤层距地表的距离很近时,一般选择直接剥离地表土层挖掘煤炭,此为露天煤矿。煤是最主要的固体燃料,是可燃性有机岩的一种,根据煤化程度的不同,可分为泥炭、褐煤、烟煤和无烟煤四类。
3.在煤矿开采施工中,经常出现冒顶、塌方的现象,造成通路断绝,由于受地理环境的限制,不便于探测事故发生地的情况,无法及时确定受困人员的位置情况以及事故发生地的环境情况,致使本应活着的人无法救出。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种多传感器融合的煤矿救援机器人及其控制方法,解决了受地理环境的限制,不便于探测事故发生地的情况,无法及时确定受困人员的位置情况以及事故发生地的环境情况,致使本应活着的人无法救出的问题。
6.(二)技术方案
7.为实现以上目的,本发明通过以下技术方案予以实现:
8.一方面,提供了一种多传感器融合的煤矿救援机器人,包括第一连接板、第二连接板和第三连接板,所述第一连接板、第二连接板和第三连接板之间依次排列且固定连接,所述第一连接板远离所述第二连接板的端部安装有探照灯,所述第一连接板远离所述第二连接板的端部安装有摄像头,所述第二连接板中部开设有安装槽,所述安装槽内安装有伺服电机,所述伺服电机的输出端固定安装有存放板;
9.所述第一连接板、第二连接板和第三连接板底部固定安装有支撑板,所述支撑板外侧套设有履带,所述安装板一端设有与履带内壁啮合的主动齿轮,所述安装板另一端设有与履带相适配的从动轮,所述安装板表面安装有多个减震组件,所述减震组件的输出端安装有减震轮。
10.优选的,所述减震组件包括固定安装在所述支撑板上的立柱,所述立柱上设有转动连接的“7”型杆,所述“7”型杆的折端与所述立柱连接,所述“7”型杆的一端转动连接在所述减震轮上,所述“7”形杆的另一端开设有连接孔,所述连接孔内套设有活动连接的第一连接环,所述第一连接环上固定连接有弹簧,所述弹簧的端部固定连接有第二连接环,所述支撑板上固定有套环,所述第二连接环与套环之间活动连接。
11.优选的,位于所述摄像头下方的所述第一板内开设有第一调节槽,所述第一调节槽底部安装有第一电机,所述第一电机的输出端设有第一主动带轮,所述第一主动带轮上
套设有第一传动带,所述第一传动带远离第一主动带轮一侧内部设有第一从动带轮,所述第一从动带轮中部穿设有第一支撑柱,所述第一支撑柱的底部转动连接在所述第一调节槽的底壁,所述第一支撑柱的顶端穿过所述第一调剂槽并设有固定连接的第一连接柱,所述第一连接柱端部固定安装有第一支撑台,所述第一支撑台表面固定安装有第一连接框,所述摄像头转动连接在所述第一连接框中部,所述摄像头尾部设有转动连接的第一电动伸缩杆,所述第一电动伸缩杆的另一端转动连接在所述第一连接框表面。
12.优选的,位于所述探照灯下方的所述第二板内开设有第二调节槽,所述第二调节槽底部安装有第二电机,所述第二电机的输出端设有第二主动带轮,所述第二主动带轮上套设有第二传动带,所述第二传动带远离第二主动带轮一侧内部设有第二从动带轮,所述第二从动带轮中部穿设有第二支撑柱,所述第二支撑柱的底部转动连接在所述第二调节槽的底壁,所述第二支撑柱的顶端穿过所述第二调剂槽并设有固定连接的第二连接柱,所述第二连接柱端部固定安装有第二支撑台,所述第二支撑台表面固定安装有第二连接框,所述探照灯转动连接在所述第二连接框中部,所述探照灯尾部设有转动连接的第二电动伸缩杆,所述第二电动伸缩杆的另一端转动连接在所述第二连接框表面。
13.优选的,所述存放板一端设有固定连接的机械手臂。
14.优选的,所述第三板中部设有用于扩音的扩音器。
15.再一方面,提供了一种所述的一种多传感器融合的煤矿救援机器人的控制方法,所述控制方法包括:
16.在救援机器人工作时,通过减震轮配合减震组件实现减震效果;
17.通过第一电机驱动第一主动带轮转动,通过第一传动带带动第一从动带轮转动,第一从动带轮带动第一支撑柱转动,第一支撑柱配合第一连接柱、第一支撑台以及第一连接框实现摄像头水平方向的转动,通过第一电动伸缩杆实现摄像头竖直方向的转动,进行全方位拍摄;
18.通过第二电机驱动第二主动带轮转动,通过第二传动带带动第二从动带轮转动,第二从动带轮带动第二支撑柱转动,第二支撑柱配合第二连接柱、第二支撑台以及第二连接框实现探照灯水平方向的转动,通过第二电动伸缩杆实现探照灯竖直方向的转动,进行全方位照明;
19.通过存放板存放物资送到事故地供被困人员使用,通过机械手臂帮助被困人员。
20.(三)有益效果
21.本发明一种多传感器融合的煤矿救援机器人,有效的解决了受地理环境的限制,不便于探测事故发生地的情况,无法及时确定受困人员的位置情况以及事故发生地的环境情况,致使本应活着的人无法救出的问题。
附图说明
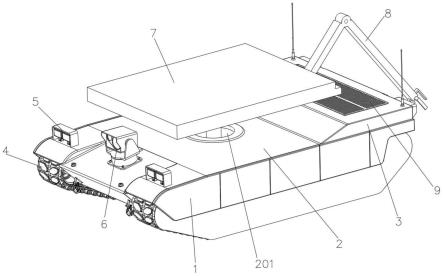
22.图1为本发明机器人整体结构示意图;
23.图2为本发明机器人部分结构图;
24.图3为本发明机器人部分结构图;
25.图4为本发明机器人部分结构图;
26.图5为本发明机器人部分结构图。
27.其中,1、第一板;101、第一调节槽;102、第二调节槽;2、第二板;3、第三板;4、履带;5、探照灯;6、摄像头;7、存放板;8、机械手臂;9、扩音器;10、主动齿轮;11、从动轮;12、支撑板;13、减震组件;14、减震轮;1401、立柱;1402、“7”型杆;1403、连接孔;1404、第一连接环;1405、弹簧;1406、第二连接环;1407、套环;1501、第一电机;1502、第一支撑柱;1503、第一主动带轮;1504、第一从动带轮;1505、第一传动带;1506、第一连接柱;1507、第一支撑台;1508、第一连接框;1509、第一电动伸缩杆;1601、第二电机;1602、第二支撑柱;1603、第二主动带轮;1604、第二从动带轮;1605、第二传动带;1606、第二连接柱;1607、第二支撑台;1608、第二连接框;1609、第二电动伸缩杆。
具体实施方式
28.下面将结合本发明的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
29.请参阅图1-2,本发明的一个实施例提供了一种多传感器融合的煤矿救援机器人,包括第一连接板、第二连接板和第三连接板,第一连接板、第二连接板和第三连接板之间依次排列且固定连接,第一连接板远离第二连接板的端部安装有探照灯5,第一连接板远离第二连接板的端部安装有摄像头6,第二连接板中部开设有安装槽,安装槽内安装有伺服电机,伺服电机的输出端固定安装有存放板7;
30.第一连接板、第二连接板和第三连接板底部固定安装有支撑板12,支撑板12外侧套设有履带4,安装板一端设有与履带4内壁啮合的主动齿轮10,安装板另一端设有与履带4相适配的从动轮11,安装板表面安装有多个减震组件13,减震组件13的输出端安装有减震轮14。
31.请参阅图3,为了实现良好的减震效果,进一步的,减震组件13包括固定安装在支撑板12上的立柱1401,立柱1401上设有转动连接的“7”型杆1402,“7”型杆1402的折端与立柱1401连接,“7”型杆1402的一端转动连接在减震轮14上,“7”形杆的另一端开设有连接孔1403,连接孔1403内套设有活动连接的第一连接环1404,第一连接环1404上固定连接有弹簧1405,弹簧1405的端部固定连接有第二连接环1406,支撑板12上固定有套环1407,第二连接环1406与套环1407之间活动连接。
32.请参阅图4,为了实现摄像头6全方位拍摄,进一步的,位于摄像头6下方的第一板1内开设有第一调节槽101,第一调节槽101底部安装有第一电机1501,第一电机1501的输出端设有第一主动带轮1503,第一主动带轮1503上套设有第一传动带1505,第一传动带1505远离第一主动带轮1503一侧内部设有第一从动带轮1504,第一从动带轮1504中部穿设有第一支撑柱1502,第一支撑柱1502的底部转动连接在第一调节槽101的底壁,第一支撑柱1502的顶端穿过第一调剂槽并设有固定连接的第一连接柱1506,第一连接柱1506端部固定安装有第一支撑台1507,第一支撑台1507表面固定安装有第一连接框1508,摄像头6转动连接在第一连接框1508中部,摄像头6尾部设有转动连接的第一电动伸缩杆1509,第一电动伸缩杆1509的另一端转动连接在第一连接框1508表面。
33.请参阅图5,为了实现探照灯5全方位照明进一步的,位于探照灯5下方的第二板2
内开设有第二调节槽102,第二调节槽102底部安装有第二电机1601,第二电机1601的输出端设有第二主动带轮1603,第二主动带轮1603上套设有第二传动带1605,第二传动带1605远离第二主动带轮1603一侧内部设有第二从动带轮1604,第二从动带轮1604中部穿设有第二支撑柱1602,第二支撑柱1602的底部转动连接在第二调节槽102的底壁,第二支撑柱1602的顶端穿过第二调剂槽并设有固定连接的第二连接柱1606,第二连接柱1606端部固定安装有第二支撑台1607,第二支撑台1607表面固定安装有第二连接框1608,探照灯5转动连接在第二连接框1608中部,探照灯5尾部设有转动连接的第二电动伸缩杆1609,第二电动伸缩杆1609的另一端转动连接在第二连接框1608表面。
34.进一步的,存放板7一端设有固定连接的机械手臂8。
35.进一步的,第三板3中部设有用于扩音的扩音器9。
36.本发明又一个实施例提供了一种的一种多传感器融合的煤矿救援机器人的控制方法,控制方法包括:
37.在救援机器人工作时,通过减震轮14配合减震组件13实现减震效果;
38.通过第一电机1501驱动第一主动带轮1503转动,通过第一传动带1505带动第一从动带轮1504转动,第一从动带轮1504带动第一支撑柱1502转动,第一支撑柱1502配合第一连接柱1506、第一支撑台1507以及第一连接框1508实现摄像头6水平方向的转动,通过第一电动伸缩杆1509实现摄像头6竖直方向的转动,进行全方位拍摄;
39.通过第二电机1601驱动第二主动带轮1603转动,通过第二传动带1605带动第二从动带轮1604转动,第二从动带轮1604带动第二支撑柱1602转动,第二支撑柱1602配合第二连接柱1606、第二支撑台1607以及第二连接框1608实现探照灯5水平方向的转动,通过第二电动伸缩杆1609实现探照灯5竖直方向的转动,进行全方位照明;
40.通过存放板7存放物资送到事故地供被困人员使用,通过机械手臂8帮助被困人员。
41.工作原理:使用时,通过减震轮14配合减震组件13在机器人运动时实现良好的减震效果;通过第一电机1501驱动第一主动带轮1503转动,通过第一传动带1505带动第一从动带轮1504转动,第一从动带轮1504带动第一支撑柱1502转动,第一支撑柱1502配合第一连接柱1506、第一支撑台1507以及第一连接框1508实现摄像头6水平方向的转动,通过第一电动伸缩杆1509实现摄像头6竖直方向的转动,进行全方位拍摄,以很好的确认被困人员的情况;通过第二电机1601驱动第二主动带轮1603转动,通过第二传动带1605带动第二从动带轮1604转动,第二从动带轮1604带动第二支撑柱1602转动,第二支撑柱1602配合第二连接柱1606、第二支撑台1607以及第二连接框1608实现探照灯5水平方向的转动,通过第二电动伸缩杆1609实现探照灯5竖直方向的转动,进行全方位照明,以很好的确认被困人员的情况;通过存放板7存放物资送到事故地供被困人员使用,通过机械手臂8帮助被困人员,从而有效地解决了受地理环境的限制,不便于探测事故发生地的情况,无法及时确定受困人员的位置情况以及事故发生地的环境情况,致使本应活着的人无法救出的问题。
42.需要说明的是,在本文中,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要
素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括所述要素的过程、方法、物品或者设备中还存在另外的相同要素。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
