1.本发明涉及新能源汽车技术领域,具体地涉及一种基于改进步长的燃料电池最大功率点的控制方法及系统。
背景技术:
2.近年来,全球能源危机和环境污染问题日趋严重,世界各国开始大力发展可再生能源。在世界各国逐渐开始禁售燃油汽车的大背景下,各大汽车制造商急需一种清洁能源来代替燃油,在各种各样的清洁能源中,燃料电池作为一种将化学能直接转化为电能的发电设备,被认为是最具潜力的绿色能源之一。其中,质子交换膜燃料电池(pemfc)具有清洁发电、高可靠性、高效率和低噪声的优点,已经开始逐渐应用到新能源汽车的研发当中。然而,质子交换膜燃料电池维护成本高、使用寿命短的问题,严重阻碍了其大规模的应用。采用先进的控制方法,是提高燃料电池整体性能的重要手段。其中,采用最大功率点跟踪(mppt)技术是目前最常用的提高燃料电池整体性能的解决方案,尽管燃料电池的燃料效率和输出功率不能同时优化,但在一些实际应用中,功率密度比燃料的效率更加重要,因此,将燃料电池控制在最大功率点进行输出也正在逐渐成为研究热点。
3.目前,已经有大量的国内外学者对mppt技术进行了深入的研究,采用了扰动观测法(p&o),该方法的优点在于算法简单且易于实现,但是在稳态下会产生震荡,严重降低了燃料电池的效率;将扰动观测法与预测模型相结合,通过建立系统性能的目标函数,估算控制变量下一时刻的位置,来预测功率在曲线上的移动方向,但其预测模型公式较为复杂,在实际情况下难以实现;采用了固定电压法,通过预先设置的输出电压,不断调整电池的输出电压,直到达到预设值,该方法简单易实现,但当外界条件发生变化时,需要不断的改变预设电压,才能够实现mppt控制,因此实际操作中并不实用。
技术实现要素:
4.本发明实施例的目的是提供一种基于改进步长的燃料电池最大功率点的控制方法及系统,该控制方法及系统能够提高燃料电池的输出功率。
5.为了实现上述目的,本发明实施例提供一种基于改进步长的燃料电池最大功率点的控制方法,包括:
6.获取燃料电池当前的输出电流;
7.根据所述输出电流在预设的燃料电池的功率和输出电流的对应关系曲线上确定对应的二阶变化率;
8.判断所述二阶变化率是否大于第一预设值;
9.在判断所述二阶变化率大于第一预设值的情况下,根据公式(1)更新电导增量法的步长,
10.11.其中,d(k)为k时刻对应的boost电路的占空比,d(k-1)为k-1时刻对应的boost电路的占空比,n1为步长因子,为变化率;
12.在判断所述二阶变化率小于等于第一预设值的情况下,计算选取的点对应的变化率;
13.判断所述变化率是否大于或等于最大变化率的第二预设值;
14.在判断所述变化率大于或等于最大变化率的第二预设值的情况下,根据所述公式(1)更新电导增量法的步长;
15.采用电导增量法调节所述燃料电池的占空比。
16.可选地,所述控制方法还包括:
17.在判断所述变化率小于最大变化率的第二预设值的情况下,判断所述变化率是否大于或等于最大变化率的第三预设值;
18.在判断所述变化率大于或等于最大变化率的第三预设值的情况下,根据公式(2)更新电导增量法的步长,
[0019][0020]
其中,n2为步长因子。
[0021]
可选地,所述控制方法还包括:
[0022]
在判断所述变化率小于最大变化率的第三预设值的情况下,根据公式(3)更新电导增量法的步长,
[0023][0024]
其中,n3为步长因子。
[0025]
可选地,所述第一预设值为0。
[0026]
可选地,所述第二预设值为所述变化率的最大值的2/3。
[0027]
可选地,所述第三预设值为所述变化率的最大值的1/3。
[0028]
可选地,所述电导增量法包括:
[0029]
判断所述燃料电池的输出电流是否位于最大功率点的左侧;
[0030]
在判断所述燃料电池的输出电流位于最大功率点的左侧的情况下,提高所述燃料电池的输出电流的占空比。
[0031]
可选地,所述电导增量法包括:
[0032]
在判断所述燃料电池的输出电流没有位于最大功率点的左侧的情况下,判断所述燃料电池的输出电流是否位于最大功率点的右侧;
[0033]
在判断所述燃料电池的输出电流是否位于最大功率点的右侧的情况下,降低所述燃料电池的输出电流的占空比。
[0034]
可选地,n1=10n2,n3=0.1n2[0035]
另一方面,本发明还提供一种基于改进步长的燃料电池最大功率点的控制系统,所述控制系统包括处理器,被配置成执行如上述任一所述的控制方法。
[0036]
通过上述技术方案,本发明提供的基于改进步长的燃料电池最大功率点的控制方法及系统通过将燃料电池的对应关系曲线分割成多个区间,针对每个区间的特性确定电导
增量法的步长,使得燃料电池的输出功率始终保持的最大功率点附近,提高了燃料电池的输出效率。
[0037]
本发明实施例的其它特征和优点将在随后的具体实施方式部分予以详细说明。
附图说明
[0038]
附图是用来提供对本发明实施例的进一步理解,并且构成说明书的一部分,与下面的具体实施方式一起用于解释本发明实施例,但并不构成对本发明实施例的限制。在附图中:
[0039]
图1是根据本发明的一个实施方式的基于改进步长的燃料电池最大功率点的控制方法的流程图;
[0040]
图2是根据本发明的一个实施方式的燃料电池的功率和输出电流的对应关系曲线的示例图;
[0041]
图3是根据本发明的一个实施方式的电导增量法的流程图;
[0042]
图4是根据本发明的一个示例的0~0.015s燃料电池输出功率的对比图;
[0043]
图5是根据本发明的一个示例的328k温度下,四种算法的收敛时间对比图;
[0044]
图6是根据本发明的一个示例的328k温度下,四种算法的稳态功率波动对比图;
[0045]
图7是根据本发明的一个示例的358k温度下,四种算法的收敛时间对比图;
[0046]
图8是根据本发明的一个示例的348k温度下,四种算法的收敛时间对比图。
具体实施方式
[0047]
以下结合附图对本发明实施例的具体实施方式进行详细说明。应当理解的是,此处所描述的具体实施方式仅用于说明和解释本发明实施例,并不用于限制本发明实施例。
[0048]
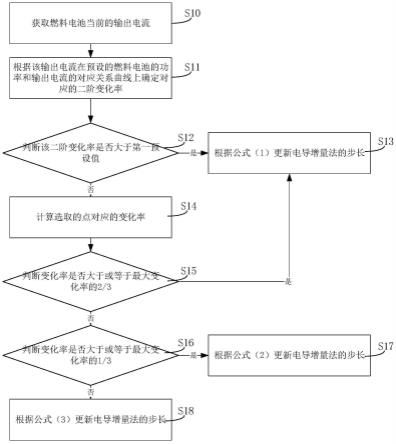
如图1所示是根据本发明的一个实施方式的基于改进步长的燃料电池最大功率点的控制方法的流程图。在该图1中,该控制方法可以包括:
[0049]
在步骤s10中,获取燃料电池当前的输出电流;
[0050]
在步骤s11中,根据该输出电流在预设的燃料电池的功率和输出电流的对应关系曲线上确定对应的二阶变化率;
[0051]
在步骤s12中,判断该二阶变化率是否大于第一预设值;
[0052]
在步骤s13中,在判断二阶变化率大于第一预设值的情况下,根据公式(1)更新电导增量法的步长,
[0053][0054]
其中,d(k)为k时刻对应的boost电路的占空比,d(k-1)为k-1时刻对应的boost电路的占空比,n1为步长因子,为变化率;
[0055]
在步骤s14中,在判断二阶变化率小于等于第一预设值的情况下,计算选取的点对应的变化率;
[0056]
在步骤s15中,判断变化率是否大于或等于最大变化率的第二预设值;
[0057]
在判断变化率大于或等于最大变化率的第二预设值的情况下,根据公式(1)更新
电导增量法的步长,即执行步骤s13。
[0058]
在步骤s16中,在判断变化率小于最大变化率的第二预设值的情况下,判断变化率是否大于或等于最大变化率的第三预设值;
[0059]
在步骤s17中,在判断变化率大于或等于最大变化率的第三预设值的情况下,根据公式(2)更新电导增量法的步长,
[0060][0061]
其中,n2为步长因子。
[0062]
在步骤s18中,在判断变化率小于最大变化率的第三预设值的情况下,根据公式(3)更新电导增量法的步长,
[0063][0064]
其中,n3为步长因子。
[0065]
传统的电导增量法主要是用于通过调节输出电流的占空比来使得燃料电池的输出功率始终位于最大功率点附近,从而提高燃料电池的输出效率。但是,由于燃料电池的功率和输出电流的对应关系曲线在不同的输出电流点所体现出的变化特性不一。举例来说,在距离最大功率点较远时,较大,因此需要加快跟踪速度,即需要提供较大的步长;而在距离最大功率点较近时,较小,因此需要增加精度,即需要提供较短的步长。步长的变化规则如下公式(4)和公式(5)所示,
[0066][0067][0068]
其中,n为固定步长。
[0069]
但是,现有技术中常用的电导增量法的步长都是固定的。在步长为固定值的情况下,如果将步长设置的过大,此时会引起数据震荡;反之,若将步长设置得过小,虽然能够较小数据震荡,但是当外接条件迅速变化时,系统无法及时响应,从而导致燃料电池的功率偏离最大功率点。因此,在如图1所示出的控制方法中,步骤s10用于获取燃料电池当前的输出电流,步骤s11针对获取的输出电流在功率和输出电流的对应关系曲线上确定出对应的二阶变化率,再结合步骤s12至步骤s18将该对应关系曲线分成四个区,即二阶变化率大于或等于0时,处于i区;二阶变化率小于0、变化率大于或等于变化率的最大值的2/3时,处于ii区;变化率大于或等于变化率的最大值的1/3且小于最大值的2/3时,处于iii区;变化率小于最大值的1/3时,处于iv区。在已知当变化率小于最大值的1/3的情况下,燃料电池的输出功率距离最大功率点最近,故可以结合每个区的特点,对更新电导增量法的步长的方法进行改进,即公式(1)至公式(3)。在使用公式(1)时,此时i区、ii区的对应关系曲线距离最大功率点最远,因此可以设置较大的步长,即数值较大的n1;在使用公式(2)时,此时iii区距离最大功率点较近,因此可以设置较小的步长,即数值较小的n2;在使用公式(3)时,此时iv区距离最大功率点最近,因此可以设置较大的步长,即数值最小的n3。对于n1、n2以及n3之间
具体的数值关系,在满足大小关系的前提下,n1、n2以及n3可以是任意数值。在本发明的一个优选示例中,n1=10n2,n3=0.1n2。
[0070]
在该实施方式中,对于电导增量法,虽然可以是本领域人员所知的多种形式。但是在本发明的一个示例中,该电导增量法可以是包括如图3中所示出的步骤。在该图3中,该电导增量法可以包括:
[0071]
在步骤s20中,判断燃料电池的输出电流是否位于最大功率点的左侧;
[0072]
在步骤s21中,在判断燃料电池的输出电流位于最大功率点的左侧的情况下,提高燃料电池的输出电流的占空比;
[0073]
在步骤s22中,在判断燃料电池的输出电流没有位于最大功率点的左侧的情况下,判断燃料电池的输出电流是否位于最大功率点的右侧;
[0074]
在步骤s23中,在判断燃料电池的输出电流是否位于最大功率点的右侧的情况下,降低燃料电池的输出电流的占空比。
[0075]
通过上述技术方案,本发明提供的基于改进步长的燃料电池最大功率点的控制方法及系统通过将燃料电池的对应关系曲线分割成多个区间,针对每个区间的特性确定电导增量法的步长,使得燃料电池的输出功率始终保持的最大功率点附近,提高了燃料电池的输出效率。
[0076]
为了进一步验证本发明提供的控制方法及系统的技术效果,在本发明的一个实施例中,可以在matlab/simulink中搭建燃料电池模型,并采用本发明提供的控制方法以及现有技术中的多种方法分别控制该燃料电池模型,并对输出功率进行比对,以确定本发明提供的方法(分段式变步长电导增量法,i-vinc)的技术效果。燃料电池模型的参数如表1所示,
[0077]
表1 boost电路基本参数
[0078][0079]
现有技术中的几种方法分别为扰动观测法(p&o)、定步长电导增量法(inc)与固定步长因子变步长电导增量法(vinc)。将仿真时间设置为0.015s。在0~0.006s,设置温度为328k;0.006~0.012s,温度升高至358k;0.012~0.015s,温度降低至348k,实验结果如图4至图8所示。
[0080]
基于该如图4至图8中所示出的曲线对比数据,其数值对比数据如表2所示,
[0081]
表2四种算法对比
[0082][0083]
针对传统变步长电导增量法存在无法同时兼顾速度和精度的问题,本文提出了一种分段式变步长电导增量法,该算法可以根据燃料电池工作点位置的不同,选择合适的步长因子,通过在matlab/simulink仿真中与扰动观测法、电导增量法和传统变步长电导增量法的对比,证明了该方法证明了该方法具有更快的响应速度和更小的功率波动,减小了燃料电池的功率损耗,延长了燃料电池的寿命。
[0084]
还需要说明的是,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、商品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、商品或者设备所固有的要素。在没有更多限制的情况下,由语句“包括一个
……”
限定的要素,并不排除在包括要素的过程、方法、商品或者设备中还存在另外的相同要素。
[0085]
以上仅为本技术的实施例而已,并不用于限制本技术。对于本领域技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原理之内所作的任何修改、等同替换、改进等,均应包含在本技术的权利要求范围之内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
