1.本发明涉及激光领域,尤其涉及一种激光帧测距方法。
背景技术:
2.激光测距是利用激光特征(如脉冲、相位等)进行距离测量的方法,在卫星间和星地间被广泛使用。随着星间组网、卫星导航技术的迅猛发展,单一测距方法无法满足日益增长的通信和测距需求。激光的高速通信解决了组网卫星间的通信速率瓶颈,基于激光通信信号实现的高精度测距性能对卫星的定位或导航定位系统有着重大意义。
3.在现有的研究文献中,很多都是采用双向单程测距原理来实现两终端之间距离测量。孙建锋在“高速率激光通信方法和高精度激光测距一体化方法”,2019-02-01中采用测距码和时钟相位差的方式实现粗测距和精测距,但其接收测距码需和本地测距码进行相关运算,复杂度较高。funan zhu在“inter-satellite laser-ranging based on intradyne coherent detection”,2021:8930-8938中同样采用粗测距和精测距,其采用高速adc进行采样,并使用dds(direct digital synthesis)技术对比本地时钟和恢复时钟相位差实现精测距,其实现成本高。
技术实现要素:
4.有鉴于现有技术的上述缺陷,本发明所要解决的技术问题是现有的激光通信和测距一体化技术成本高、操作复杂,不易推广和实现。因此,本发明提供了一种激光测距方法,利用帧同步、测距帧信息处理和时钟相位计算模块,通过帧同步模块恢复出通信数据,通信数据传到测距帧信息处理模块对测距信息进行提取,得到粗测距值,时钟相位计算模块计算出本地时钟和恢复时钟相位差,得到精确测距值,无需使用高精度adc和dds,实现简单,成本低。
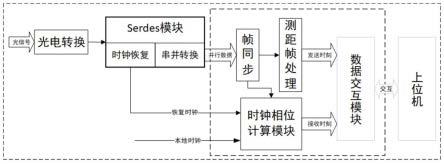
5.为实现上述目的,本发明提供了一种激光帧测距方法,前级光电转换模块将激光信号转换成电信号,再经过锁相环恢复出时钟和并行数据,利用帧同步模块根据同步头对并行数据进行帧同步,产生帧头同步判决脉冲和同步时延,测距帧信息处理模块从帧数据中心提取出发送时刻的测距信息,再利用时钟相位计算模块计算出恢复时钟和本地时钟相位差,在同步判决脉冲到达后,根据相位差与同步时延计算得到高精度接收时刻,数据交互模块接收发送时刻与接收时刻,计算测距值,并交由后级上位机作进一步处理。
6.进一步地,帧同步模块根据帧头进行移位同步,在识别到帧头之后,对并行数据进行帧对齐,产生同步判决脉冲以及同步时延,发送到时钟相位计算模块,其中同步判决脉冲作为触发信号,同步时延用以补偿同步模块造成的误差。
7.进一步地,测距信息包括秒计数和测距帧发送时刻,测距帧处理模块从测距帧中提取秒计数、处理时延、对端的本地测距值,将这些数据作为对端发送时刻发送给数据交互模块。
8.进一步地,时钟相位计算模块通过与本地时钟对齐的高频时钟计数器来对比本地
时钟和恢复时钟,进行相位差计算。
9.进一步地,高频时钟计数器包括帧计数和相位计数,帧计数由serdes模块的tx时钟驱动,相位计数包括若干个子计数器,每个子计数器在tx时钟m倍频之下工作,每个子计数器的工作时钟存在相等相位差。
10.进一步地,每个子计数器都存在于每个子时钟下,通过循环移位寄存器的方式实现计数。
11.进一步地,在待测时钟的每个上升沿,通过打拍的方式,将已经过格雷编码的帧计数值与子时钟计数值打拍至待测时钟的时钟域下,再进行格雷码解码,然后在待测时钟域下进行相位计数值的计算,求取相位计数值均值,并通过相位计数值修正帧计数值。
12.进一步地,相位计数值包括若干个子计数器计数值求累加之和,通过至少两路累加器交替调用,消除累加和归零误差。
13.进一步地,帧计数值和相位计数值包括以下三种关系:相位计数归零与帧计数自增基本同步、相位计数归零滞后于帧计数自增、相位计数归零超前于帧计数自增。
14.进一步地,接收时刻通过帧计数与相位计数计算获得,接收时刻数值需要根据上述三种情况进行修正。
15.技术效果
16.本发明的一种激光帧测距方法,使用通信帧负载测距信息、开销小,无需针对测距改变通信帧结构,时钟相位计算实现简单,无需进行频域转换,全程在电域实现,无需改变光域结构,测距结果精确且成本低。
17.以下将结合附图对本发明的构思、具体结构及产生的技术效果作进一步说明,以充分地了解本发明的目的、特征和效果。
附图说明
18.图1是本发明的一个较佳实施例的一种激光帧测距方法的示意图;
19.图2是本发明的一个较佳实施例的一种激光帧测距方法的简易测距流程示意图。
20.图3是本发明的一个较佳实施例的一种激光帧测距方法的接收端简易测距时序图。
21.图4是本发明的一个较佳实施例的一种激光帧测距方法的时钟相位计算模块结构图。
22.图5是本发明的一个较佳实施例的一种激光帧测距方法的锁相环时钟生成的简易时序图。
23.图6是本发明的一个较佳实施例的一种激光帧测距方法的相位时钟简易时序图。
24.图7是本发明的一个较佳实施例的一种激光帧测距方法的相位计数超前帧计数的简易时序图。
25.图8是本发明的一个较佳实施例的一种激光帧测距方法的相位计数延后帧计数的简易时序图。
具体实施方式
26.为了使本发明所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结
合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
27.以下描述中,为了说明而不是为了限定,提出了诸如特定内部程序、技术之类的具体细节,以便透彻理解本发明实施例。然而,本领域的技术人员应当清楚,在没有这些具体细节的其它实施例中也可以实现本发明。在其它情况中,省略对众所周知的系统、装置、电路以及方法的详细说明,以免不必要的细节妨碍本发明的描述。
28.如图1所示,本发明提功率一种激光帧测距方法,前级光电转换模块将激光信号转换成电信号,再经过锁相环恢复出时钟和并行数据,利用帧同步模块根据同步头对并行数据进行帧同步,产生帧头同步判决脉冲,以及同步时延,测距帧信息处理模块从帧数据中心提取出测距信息,再利用时钟相位计算模块计算出恢复时钟和本地时钟相位差,在同步判决脉冲到达后,根据相位差与同步时延计算得到高精度接收时刻。
29.本发明实施例提供了一种激光帧测距方法,本实施例中将以双向单程测距试验来说明本发明提供的一种激光帧测距方法的具体过程和原理,双向单程测距流程中,激光终端a发送、激光终端b接收的测距流程,与激光终端a接收、激光终端b发送的测距流程相同,此处以终端a发送,终端b接收为例,测距过程如图2所示。
30.本实施例的一种激光帧测距方法,包括以下流程:
31.1)在激光终端a中,等待的pps_a_1到达之后,记录第一个完整激光链路帧帧头第一个bit前沿的时间,相对于pps_a_1的偏移量,记为发送端本地时间戳δt
a1
,即为发送时刻,单位为0.1ns。将其填入激光链路帧的帧头中,并将此帧标记为测距有效帧。
32.2)在激光终端b中,等待pps_b_1到达后,记录随后到达的第一个测距有效帧帧头第一个bit前沿的时间,相对于pps_b_1的偏移量,记为接收端本地时间戳δt
b1
,即为接收时刻,单位为0.1ns。
33.3)激光终端b,从接收到的测距有效帧的帧头内获得发送端本地时间戳δt
a1
。
34.4)激光终端b计算,得到激光终端b本地测距值t1=δt
b1-δt
a1
。
35.5)激光终端b的发送端,在随后的100帧激光链路帧头内,填入相同的测距周内秒计数t
b1
、以及激光终端b本地测距值t1。在其余时刻,填入默认值0xffffff与0xffffffff。其中测距周内秒计数用于标识本地测距值的时间,每一秒内,激光终端a、b各有一个本地测距值。
36.6)激光终端a的接收端在pps_a_1后,收到有效的测距周内秒计数t
b1
、以及激光终端b本地测距值t1之后,根据t
b1
,检索对应的激光终端a本地测距值t2。将t1、t2打包上传,供软件使用。
37.上述过程中,测距关键在于发送时刻δt
a1
与接收时刻δt
b1
的准确获取,得到0.1ns的精度,在本发明实施例中采用时钟相位计算模块实现发送时刻δt
a1
与接收时刻δtb的准确获取。
38.特别的,在接收端,时钟相位计算模块位于帧同步模块之后,帧同步会引入随机的时延,干扰接收时刻测量准确度,时钟相位计算模块输出的接收时刻,需减去帧同步模块输出的同步时延,进行补偿。
39.时钟相位计算模块通过与本地时钟对齐的高频时钟计数器来对比本地时钟和恢复时钟,进行相位差计算。以接收端(激光终端b)为例,在测距帧到达后,产生测距脉冲,通
过打拍得方式,获取本地时钟域(serdes tx时钟)下的本地时间戳,得到δt
b1
,如图3所示。
40.本地时间戳是通过在本地时钟域下,搭建高频时钟计数器的方式,计算接收端恢复时钟与本地时钟的相位差,获取高精度接收时刻,如图4所示。
41.高频时钟计数器的组成,包括帧计数与相位计数两部分,帧时钟计数由serdes模块的tx时钟驱动,频率为f,计数满1s归零。相位时钟由n个子时钟组成,每个子时钟为帧时钟的m倍频,即频率为mf,计数满f-1
秒归零,其中n个子时钟之间存在2π
×
n-1
的相位差,共同组成频率为mnf的虚拟时钟。
42.以图5为例,帧时钟为156.25mhz,由8个子时钟组成,子时钟的频率为帧时钟的频率的4倍频,为625mhz,子时钟之间存在π/4的相位差,组成频率为5ghz的虚拟时钟,即在5ghz时钟的每个上升沿,均存在一路625mhz时钟的上升沿与之对应。
43.在每个子时钟下都存在一个子计数器,通过循环移位寄存器的方式,实现0到2m-1的累加计数。计数器计数值的输出分为k路,每路间计数值相差2mk-1
,用于避免计算相位计数值时子计数器计数值归零产生的误差。子计数器输出采用格雷编码,限制跨时钟域产生的计数值抖动不超过
±
1。
44.以图6为例,相位计数由8个子计数器组成,每个子计数器实现0-7的计数。子计数器输出分为a、b两路,交替调用,a、b两路计数值相差4。
45.在待测时钟的每个上升沿,通过打拍的方式,将已经过格雷编码的帧计数值与子时钟计数值打拍至待测时钟的时钟域下,再进行格雷码解码,然后在待测时钟域下进行相位计数值的计算,并通过相位计数值修正帧计数值。
46.相位计数的计数值是通过对8个子计数器计数值求累加和得到,输出包含计数值与同步位。以图6为例,在5ghz虚拟时钟下,其计数值范围为0-62,单位为0.1ns,分辨率为0.2ns,同步位为单比特,表示累加器中调用的是否为a路,该同步位与帧计数的最低位存在对应关系。
47.求取计数值的具体流程如下:
48.1、分别对a、b两路各个子计数器的计数值作累加和,得sum_a、sum_b;
49.2、若sum_a在16-47范围内,输出计数值为(sum_a-16)*2,同步位置1;
50.3、若sum_b小于16,输出计数值为(sum_b 16)*2,同步位置1;
51.4、若sum_b大于47,输出计数值为(sum_b-48)*2,同步位置1;
52.5、剩余情况下,输出计数值为(sum_b-16)*2,同步位置0。
53.由于跨时钟域打拍,在格雷编码下,帧计数器存在
±
1(
±
6.4ns)的抖动,每个子计数器存在
±
1(
±
0.2ns)的抖动。通过上述相位计数计算模块,子计数器抖动导致的相位计数值的抖动最大为
±
16(
±
1.6ns)。
54.为进一步提高相位计数的稳定性,需对多次相位计数值(快时钟计数)的输出求取均值操作,可使误差达到0.1ns以下,该步骤由均值器完成,如图4所示。
55.均值器的工作流程如下:
56.1、锁存第一位输入测距值,及其同步位;
57.2、之后的输入测距值与第一位测距值进行比较,若存在进位或退位,则经行周期延拓;
58.3、求取平均值;
59.4、根据平均值与第一个测距值的近退位关系,修正同步位。
60.对于帧计数而言,通过相位计数的同步标识位,可以消除帧计数值的
±
6.4ns误差,原理如下:
61.假定相位计数同步标志位为af,帧计数值的最低位为cs0,同步标志位a,可由af与cs0异或运算后得到,
[0062][0063]
其中af会在相位计数归零时翻转,此时帧计数值自增,cs0在同一时刻也会翻转。因此在系统运行中,从任一时钟域,对时钟计数模块的计数值进行采样,a应为一固定值。
[0064]
帧计数值和相位计数值包括以下三种关系:相位计数归零与帧计数自增基本同步(帧计数值无误差)、相位计数归零超前于帧计数自增(帧计数值误差-6.4ns,如图7所示)、相位计数归零滞后于帧计数自增(帧计数值误差 6.4ns,如图8所示),该超前(延后)会导致同步标志位a的翻转。因此通过判断同步标志位a是否翻转,即可纠正帧计数误差。
[0065]
同步标志位a是否翻转需要一个参考,可采用serdes tx时钟作为待测时钟,此时待测时钟与帧计数值在同一时钟域下,符合时钟约束,获得的帧计数值不存在误差,而帧时钟与子时钟通过锁相环进行相位锁定,因此相位计数值不存在归零。此状态下获得的同步标志位a是稳定的,可作为参考状态,记为as。
[0066]
因此,在其他时钟域获取时间戳时,只需对比同步标志位a与参考状态as,即可纠正帧计数误差。修正公式如下:
[0067][0068]
其中,cr为待测信号获得的本地时间戳;cs为待测信号时钟域下的帧计数值;cf为待测信号时钟域下的相位计数值;a为待测信号时钟域下的同步标志位;as为serdestx时钟域下的参考同步标志位,该标志位恒定不变。
[0069]
如图7所示,相位计数归零超前帧计数自增。a翻转时,计数值产生-64误差,按公式修正后a翻转前后时刻计数值连续;如图8所示,相位计数归零落后帧计数自增,a翻转时,计数值产生 64误差,按公式修正后a翻转前后时刻计数值连续。验证成立。
[0070]
另外,本实施例中的帧同步、测距帧信息处理和时钟相位计算模块都是用verilog语言实现代码并烧录在fpga板卡上,fpga板卡连接着一台主机,本发明实施例的帧同步、测距帧信息处理和时钟相位计算模块通过fpga与主机的交互,来实现本地(fpga)与主机的交互。本发明的数据传输方法便于实现及推广。
[0071]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。
