1.本发明涉及化学机械平坦化技术领域,具体涉及抛光垫沟槽深度检测方法。
背景技术:
2.伴随着摩尔定律的发展,化学机械平坦化(chemical mechanical planarization,cmp)在半导体工艺过程中的作用越来越重要。抛光垫作为cmp过程中的关键耗材,其形貌对晶圆的抛光效果至关重要,沟槽深度也会影响晶圆的抛光效率。抛光垫是cmp系统的重要组成部分,具有储存和运输抛光液、排出抛光过程产物、维持工艺过程所需的机械和化学环境等功能。因此,抛光垫的性能会影响cmp过程中的加工效率和加工质量。抛光垫的形貌对加工过程影响重大。常见的抛光垫表面形貌有无沟槽、环形沟槽、方形沟槽、渐开线沟槽等各种形貌,其中常见的为环形沟槽。在加工过程中,沟槽中充满抛光液和抛光过程产物的混合体,在晶圆和修整器的机械摩擦作用下,抛光垫的沟槽深度会不断减少,当沟槽深度减少到一定程度后,就会严重影响抛光效率和质量。抛光垫更换过早,会造成耗材的浪费;更换过晚,会影响晶圆的加工质量和效率。因此需要对抛光垫的沟槽深度进行定期的测量监控,以保证能够适时的进行更换。现有技术中,通常需要将cmp系统停机来进行对抛光垫沟槽深度的测量。cmp系统停机后,采用人工方式对沟槽深度进行测量,操作复杂效率较低,测量过程中大概率的会对抛光垫表面形貌造成损伤;并且测量数据靠人工读取,存在较大误差。因此需要一种方案,解决停机人工测量抛光垫沟槽深度效率低、易造成表面损伤和误差较大的问题。
技术实现要素:
3.本发明提供一种抛光垫沟槽深度检测方法以解决停机人工测量抛光垫沟槽深度效率低、易造成表面损伤和误差较大的问题。
4.本发明提供一种抛光垫沟槽深度检测方法,包括以下步骤:提供cmp系统和抛光垫;设置标记光线,通过光学模块向抛光垫的沟槽处投射标记光线,标记光线横跨沟槽的宽度方向;定义标记光线在抛光垫表面的部分为第一标记光线,定义标记光线在沟槽底部的部分为第二标记光线;获取检测图像,在cmp系统运行一段时间后,通过设置于抛光垫侧部上方的拍照模块拍摄抛光垫,获取检测图像;测量此时第一标记光线与第二标记光线之间的间距长度,定义该长度为检测长度;获取计算夹角的正弦值,定义拍照模块所在水平线至第二标记光线与抛光垫的沟槽远离拍照模块一侧的侧壁的交点处的连线为第一测量线,定义拍照模块至第二标记光线与沟槽侧壁的交点处的连线为第二测量线;定义第二测量线与第一测量线之间的夹角为计算夹角,通过拍照模块的安装位置获得计算夹角的正弦值;此时沟槽的实际深度由以下公式计算得到:
5.hm=lm÷
sin∠α
6.式中,hm为沟槽的实际深度;lm为检测图像中的检测长度;sin∠α为计算夹角的正弦值。
7.可选的,获取检测图像的步骤中,获取的检测图像至少包含沟槽在远离拍照模块一侧的槽底;检测长度为第二标记光线在该侧槽底的端点和第一标记光线距离该侧槽底最近的端点之间的间距长度。
8.可选的,计算夹角的正弦值通过以下公式计算获得。
9.cos∠α=lc÷
lb10.(sin∠α)2 (cos∠α)2=1
11.式中,cos∠α为计算夹角的余弦值;lb为第二测量线的长度;lc为第一测量线的长度。
12.可选的,沟槽的实际深度的计算,由cmp系统中的数据处理模块进行,数据处理模块连接拍照模块,以获取检测图像;计算夹角为计算后输入设定。
13.本发明还提供另一种抛光垫沟槽深度检测方法,包括以下步骤:提供cmp系统和抛光垫;通过设置于cmp系统中抛光垫侧部上方的拍照模块,获取抛光垫的检测图像;提供比对标尺,比对标尺为检测图像中抛光垫的沟槽的实际高度与检测图像中的抛光垫的沟槽的视觉长度的比例尺,通过比对标尺的读数得到沟槽的实际高度。
14.可选的,比对标尺通过以下步骤得到:提供cmp系统和样本抛光垫;设置标记光线,通过光学模块向样本抛光垫的沟槽处投射标记光线,标记光线横跨沟槽的宽度方向;定义标记光线在样本抛光垫表面的部分为第一标记光线,定义标记光线在沟槽底部的部分为第二标记光线;获取计算夹角的正弦值,定义拍照模块所在水平线至第二标记光线与样本抛光垫的沟槽远离拍照模块一侧的侧壁的交点处的连线为第一测量线,定义拍照模块至第二标记光线与沟槽侧壁的交点处的连线为第二测量线;定义第二测量线与第一测量线之间的夹角为计算夹角,通过拍照模块的安装位置获得计算夹角的正弦值;获取检测图像组,运行cmp系统后,每间隔相同时间通过设置于抛光垫侧部上方的拍照模块拍摄一次抛光垫,获取检测图像组;测量检测图像组中每一检测图像中第一标记光线与第二标记光线之间的间距长度,定义该长度为检测长度;每一检测图像中沟槽的实际深度由以下公式计算得到;
15.hn=ln÷
sin∠α
16.式中,hn为沟槽的实际深度;ln为检测图像中的检测长度;sin∠α为计算夹角的正弦值。
17.根据检测图像组中的每一检测图像中的检测长度和检测图像组中的每一检测图像中的实际深度制得比对标尺,使比对标尺上的检测长度与实际深度的数值一一对应。
18.可选的,获取的检测图像至少包含沟槽在远离拍照模块一侧的槽底;检测长度为第二标记光线在该侧槽底的端点和第一标记光线距离该侧槽底最近的端点之间的间距长度。
19.可选的,计算夹角的正弦值通过以下公式计算获得。
20.cos∠α=lc÷
lb21.(sin∠α)2 (cos∠α)2=1
22.式中,cos∠α为计算夹角的余弦值;lb为第二测量线的长度;lc为第一测量线的长度。
23.可选的,沟槽的实际深度的计算,由cmp系统中的数据处理模块进行,数据处理模块连接拍照模块,以获取检测图像;计算夹角为计算后输入设定;比对标尺为数据处理模块
计算后得到并存储于数据处理模块中。
24.可选的,拍照模块适于沿水平方向移动,获取多组多角度的检测图像,以支持抛光垫上全部沟槽的实际深度的计算。
25.本发明技术方案,具有如下优点:
26.本发明提供的抛光垫检测方法通过设置标记光线、获取计算夹角的正弦值,获取检测图像,公式计算的步骤,得到cmp系统中抛光垫的沟槽的实际深度。实际应用中由于检测过程始终不与抛光垫直接接触,因此不会对抛光垫表面造成损伤。由于通过计算获得数据因此相比人工测量误差较小。此外本方案无需停机即可测量cmp系统中抛光垫的实际深度,操作简单效率高。实时得到的深度值,可以作为调节抛光工艺参数的输入,更加精确的控制抛光精度。
附图说明
27.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
28.图1为本发明提供的抛光垫沟槽深度检测方法中标记光线的示意图;
29.图2为本发明提供的抛光垫沟槽深度检测方法中显示标记光线位置的侧视示意图;
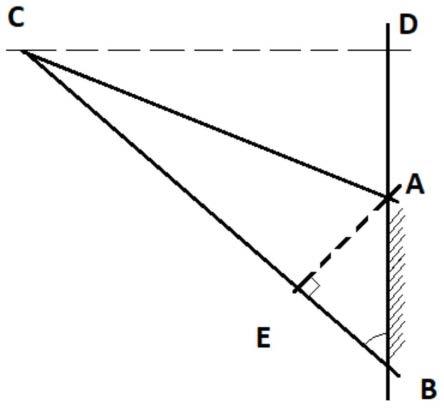
30.图3为本发明提供的抛光垫沟槽深度检测方法中计算沟槽深度的原理示意图;
31.图4为本发明提供的抛光垫沟槽深度检测方法的一实施例的流程示意图;
32.图5为本发明提供的抛光垫沟槽深度检测方法的另一实施例的流程示意图;
33.图6为图5的实施例中获取对比标尺的步骤流程示意图。
具体实施方式
34.为解决停机人工测量抛光垫沟槽深度效率低、易造成表面损伤和误差较大的问题,本发明提供一种抛光垫沟槽深度检测方法,包括以下步骤:提供cmp系统和抛光垫;设置标记光线,通过光学模块向抛光垫的沟槽处投射标记光线,标记光线横跨沟槽的宽度方向;定义标记光线在抛光垫表面的部分为第一标记光线,定义标记光线在沟槽底部的部分为第二标记光线;获取计算夹角的正弦值,定义拍照模块所在水平线至第二标记光线与抛光垫的沟槽远离拍照模块一侧的侧壁的交点处的连线为第一测量线,定义拍照模块至第二标记光线与沟槽侧壁的交点处的连线为第二测量线;定义第二测量线与第一测量线之间的夹角为计算夹角,通过拍照模块的安装位置获得计算夹角的正弦值;获取检测图像,在cmp系统运行一段时间后,通过设置于抛光垫侧部上方的拍照模块拍摄抛光垫,获取检测图像;测量此时第一标记光线与第二标记光线之间的间距长度,定义该长度为检测长度;此时沟槽的实际深度由以下公式计算得到。
35.hm=lm÷
sin∠α
36.式中,hm为沟槽的实际深度;lm为检测图像中的检测长度;sin∠α为计算夹角的正弦值。
37.本发明还提供另一种抛光垫沟槽深度检测方法,包括以下步骤:提供cmp系统和抛光垫;通过设置于cmp系统中抛光垫侧部上方的拍照模块,获取抛光垫的检测图像;提供比对标尺,比对标尺为检测图像中抛光垫的沟槽的实际高度与检测图像中的抛光垫的沟槽的视觉长度的比例尺,通过比对标尺的读数得到沟槽的实际高度。
38.下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
40.在本发明的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
41.此外,下面所描述的本发明不同实施方式中所涉及的技术特征只要彼此之间未构成冲突就可以相互结合。
42.实施例1
43.参考图1~图4,本实施例提供一种抛光垫沟槽深度检测方法,包括以下步骤:
44.提供cmp系统和抛光垫1;
45.设置标记光线;参考图1和图2,通过光学模块(图中未示出)向抛光垫1的沟槽2处投射标记光线,标记光线横跨沟槽2的宽度方向;定义标记光线在抛光垫表面的部分为第一标记光线3,定义标记光线在沟槽底部的部分为第二标记光线4。
46.获取检测图像;在cmp系统运行一段时间后,通过设置于抛光垫1侧部上方的拍照模块5拍摄抛光垫1,获取检测图像;测量此时第一标记光线3与第二标记光线4之间的间距长度,定义该长度为检测长度;
47.获取计算夹角的正弦值;参考图3,拍照模块5位于c点,a点为沟槽远离拍照模块一侧的侧壁顶点,b点为沟槽远离拍照模块一侧的底部和侧壁的交点。定义拍照模块5所在水平线(cd线)至第二标记光线4与抛光垫的沟槽远离拍照模块一侧的侧壁的交点处b的连线为第一测量线(db线),定义拍照模块5(图3中c点处)至第二标记光线与抛光垫的沟槽远离拍照模块一侧的侧壁的交点处b的连线为第二测量线(cb线);定义第二测量线cb与第一测量线db之间的夹角为计算夹角α(图中∠cbd),通过拍照模块5的安装位置获得计算夹角α的角度。
48.计算沟槽的实际深度;此时沟槽2的实际深度由以下公式计算得到:
49.hm=lm÷
sin∠α
50.式中,hm为沟槽的实际深度;lm为检测图像中的检测长度;sin∠α为计算夹角α的正弦值。
51.进一步的,获取检测图像的步骤中,获取的检测图像至少包含沟槽在远离拍照模块一侧的槽底,即至少包含图3中b点处,b点处不可被遮挡;检测长度为第二标记光线4在该侧槽底的端点(即b点处)和第一标记光线3距离该侧槽底最近的端点之间的间距长度,即检测图像中的3和4相对的两个端点之间的间距长度。
52.由于拍照模块5设置于抛光垫1的侧部上方,由于光线的直射和相机的拍照原理,检测图像中的检测长度实际上为图3中ae线的长度。因此可以通过计算夹角α的正弦值sin∠α与检测长度计算得到沟槽2的实际深度,即图3中ab线的长度。
53.进一步的,计算夹角α的角度通过以下公式计算获得。
54.cos∠α=lc÷
lb55.(sin∠α)2 (cos∠α)2=1
56.式中,cos∠α为计算夹角α的余弦值,即∠cbd的余弦值;lb为第二测量线的长度,即线db的长度;lc为第一测量线的长度,即线cb的长度。由于cos∠α可通过第二测量线的长度lb和第一测量线的长度lc计算获得,而第一测量线的长度lc和第二测量线的长度lb简单易得,从而可通过解公式(sin∠α)2 (cos∠α)2=1得到为计算夹角α的正弦值sin∠α。
57.由此,本实施例提供的抛光垫检测方法通过设置标记光线、获取检测图像、获取计算夹角的正弦值、公式计算的步骤,得到cmp系统中抛光垫1的沟槽2的实际深度。实际应用中由于检测过程始终不与抛光垫1直接接触,因此不会对抛光垫1表面造成损伤。由于通过计算获得数据因此相比人工测量误差较小。此外本方案无需停机即可测量cmp系统中抛光垫的实际深度,操作简单效率高。实时得到的实际深度值,可以作为调节抛光工艺参数的输入,更加精确的控制抛光精度。
58.此外,在其他一些实施例中,沟槽的实际深度的计算,可以由cmp系统中的数据处理模块进行,数据处理模块连接拍照模块,以获取检测图像;计算夹角为计算后输入设定。如此可实现全自动的检测。
59.拍照模块例如可以为ccd相机。光学模块可以为任意的线性光源,以可以在抛光垫表面形成线形的标记光束为准。
60.实施例2
61.参考图5-图6,并同时参考图1-图3,本发明还提供另一种抛光垫沟槽深度检测方法,包括以下步骤:
62.提供cmp系统和抛光垫;
63.通过设置于cmp系统中抛光垫1侧部上方的拍照模块5,获取抛光垫1的检测图像。
64.提供比对标尺,比对标尺为检测图像中样本抛光垫1的沟槽2的实际高度与检测图像中的样本抛光垫1的沟槽2的视觉长度的比例尺,通过比对标尺的读数得到沟槽的实际高度。
65.具体的,比对标尺通过以下步骤得到:
66.提供cmp系统和样本抛光垫1;
67.设置标记光线,通过光学模块向样本抛光垫1的沟槽2处投射标记光线,标记光线横跨沟槽2的宽度方向;定义标记光线在样本抛光垫1表面的部分为第一标记光线3,定义标记光线在沟槽底部的部分为第二标记光线4。
68.获取检测图像组,运行cmp系统后,每间隔相同时间通过设置于抛光垫侧部上方的
拍照模块5拍摄一次样本抛光垫1,获取该时刻的检测图像,全部检测图像构成检测图像组;测量检测图像组中每一检测图像中第一标记光线3与第二标记光线4之间的间距长度,定义该长度为检测长度。
69.获取计算夹角的正弦值;参考图3,拍照模块5位于c点,a点为沟槽远离拍照模块一侧的侧壁顶点,b点为沟槽远离拍照模块一侧的底部和侧壁的交点。定义拍照模块5所在水平线(cd线)至第二标记光线4与抛光垫的沟槽远离拍照模块一侧的侧壁的交点处b的连线为第一测量线(db线),定义拍照模块5(图3中c点处)至第二标记光线与抛光垫的沟槽远离拍照模块一侧的侧壁的交点处b的连线为第二测量线(cb线);定义第二测量线cb与第一测量线db之间的夹角为计算夹角α(图中∠cbd),通过拍照模块5的安装位置获得计算夹角α的角度。
70.计算每一检测图像中的沟槽2的实际深度;每一检测图像中沟槽2的实际深度由以下公式计算得到;
71.hn=ln÷
sin∠α
72.式中,hn为沟槽的实际深度;ln为检测图像中的检测长度;sin∠α为计算夹角的正弦值。
73.制得比对标尺;根据检测图像组中的每一检测图像中的检测长度和检测图像组中的每一检测图像中的实际深度制得比对标尺,使比对标尺上的检测长度与实际深度的数值一一对应。其中比对标尺可以为实体标尺供测量读数使用,也可以为数据形式的标尺存储在cmp系统的数据处理模块中。通过比对标尺的读数得到沟槽的实际高度。
74.进一步的,获取检测图像的步骤中,获取的检测图像至少包含沟槽在远离拍照模块一侧的槽底,即至少包含图3中b点处,b点处不可被遮挡;检测长度为第二标记光线4在该侧槽底的端点(即b点处)和第一标记光线3距离该侧槽底最近的端点之间的间距长度,即检测图像中的3和4相对的两个端点之间的间距长度。
75.进一步的,计算夹角α的角度通过以下公式计算获得。
76.cos∠α=lc÷
lb77.(sin∠α)2 (cos∠α)2=1
78.式中,cos∠α为计算夹角α的余弦值,即∠cbd的余弦值;lb为第二测量线的长度,即线db的长度;lc为第一测量线的长度,即线cb的长度。由于cos∠α可通过第二测量线的长度lb和第一测量线的长度lc计算获得,而第一测量线的长度lc和第二测量线的长度lb简单易得,从而可通过解公式(sin∠α)2 (cos∠α)2=1得到为计算夹角α的正弦值sin∠α。
79.由此,本实施例提供的抛光垫检测方法通过设置标记光线、获取检测图像、获取计算夹角的正弦值、公式计算的步骤,得到cmp系统中抛光垫1的沟槽2的实际深度。实际应用中由于检测过程始终不与抛光垫1直接接触,因此不会对抛光垫1表面造成损伤。由于通过计算获得数据因此相比人工测量误差较小。此外本方案无需停机即可测量cmp系统中抛光垫的实际深度,操作简单效率高。实时得到的实际深度值,可以作为调节抛光工艺参数的输入,更加精确的控制抛光精度。
80.此外,在其他一些实施例中,沟槽的实际深度的计算,可以由cmp系统中的数据处理模块进行,数据处理模块连接拍照模块,以获取检测图像;计算夹角为计算后输入设定。如此可实现全自动的检测。
81.本发明已通过实施例说明如上,相信本领域技术人员已可通过上述实施例了解本发明。显然,上述实施例仅仅是为清楚地说明所作的举例,而并非对实施方式的限定。对于所属领域的普通技术人员来说,在上述说明的基础上还可以做出其它不同形式的变化或变动。这里无需也无法对所有的实施方式予以穷举。而由此所引伸出的显而易见的变化或变动仍处于本发明创造的保护范围之中。
再多了解一些
本文用于创业者技术爱好者查询,仅供学习研究,如用于商业用途,请联系技术所有人。